(5) МИКРОМАНИЛУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для манипуляций к микроскопу | 1983 |
|
SU1114187A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38800A1 |
| Устройство для манипулирования объектами в закрытой камере | 1987 |
|
SU1472248A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38799A1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| СПОСОБ ПОДГОТОВКИ ОБРАЗЦОВ ИЗ ОПТИЧЕСКИ ПРОЗРАЧНЫХ ПОЛИМЕРНЫХ МАТЕРИАЛОВ К ИСПЫТАНИЯМ НА СТОЙКОСТЬ К ВОДНЫМ ТРИИНГАМ | 2000 |
|
RU2181485C2 |
| Устройство и способ для прецизионного переноса слоев атомарно тонких материалов любой площади на планарные подложки | 2019 |
|
RU2742761C1 |
| Устройство для обработки внутриклеточных стеклянных микроэлектродов | 1984 |
|
SU1558388A1 |
| МИКРОСКОП ДЛЯ РАБОТЫ В ПРОХОДЯЩЕМ И (ИЛИ) ОТРАЖЕННОМ СВЕТЕ | 1986 |
|
RU2037854C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ РЫБЫ ДЛЯ ПРОВЕДЕНИЯ ВЫСОКОТОЧНЫХ ИНВАЗИВНЫХ МАНИПУЛЯЦИЙ | 2022 |
|
RU2798220C1 |
I
i Изобретение относится к приборо.строению и может быть использовано в отраслях промышленности, занятых разработкой или применением микроманипуляторов для ос есталений малых высокоточных перемещений, необходимых для производства микроминиатюрных приборов электронной или иной техники, лабораторных исследований, а тгГкже для выполнения хирургических микроопераций на oprat ax зрения, слуха и т.д.
Известны манипуляторы, снабженные пантографами и предназначенные для малых перемещений различного рода инструмента и других объектов 13.
Однако их конструкции многоэлементны и сложны в изготовлении.
Наиболее близким к предлагаемому по технической сущности является микроманипулятор, содержащий основание, водило и держатель рабочего органа.
Такой микроманипулятор представляет собой рычажно-шаонирную систему из
нескольких пантогра 1 ов, г едназначенную для передачи движения с фиксированным передаточным отношением.20:f
. или 300:1 от водила к держахелю рабочего органа. Для изменения передаточ ного отношения манипулятор снабжен двумя электромагнитами, при помощи которых вводится или отключается дополнительная рычажная система. Ввиду того, что данный микроманипулятор спо® собен осуществлять перемещение объекта только в двух взаимно перпендикулярных направлениях, т.е. только в одной плоскости (без поворота объекта в этой плоскости), он снабжен дополни«5тельным пантографом для вертикального перемещения объекта, а поворот объекта в .горизонтальной плоскости может осуществляться только с передаточным отношением 1:1, т.е. без мультипликации С21.
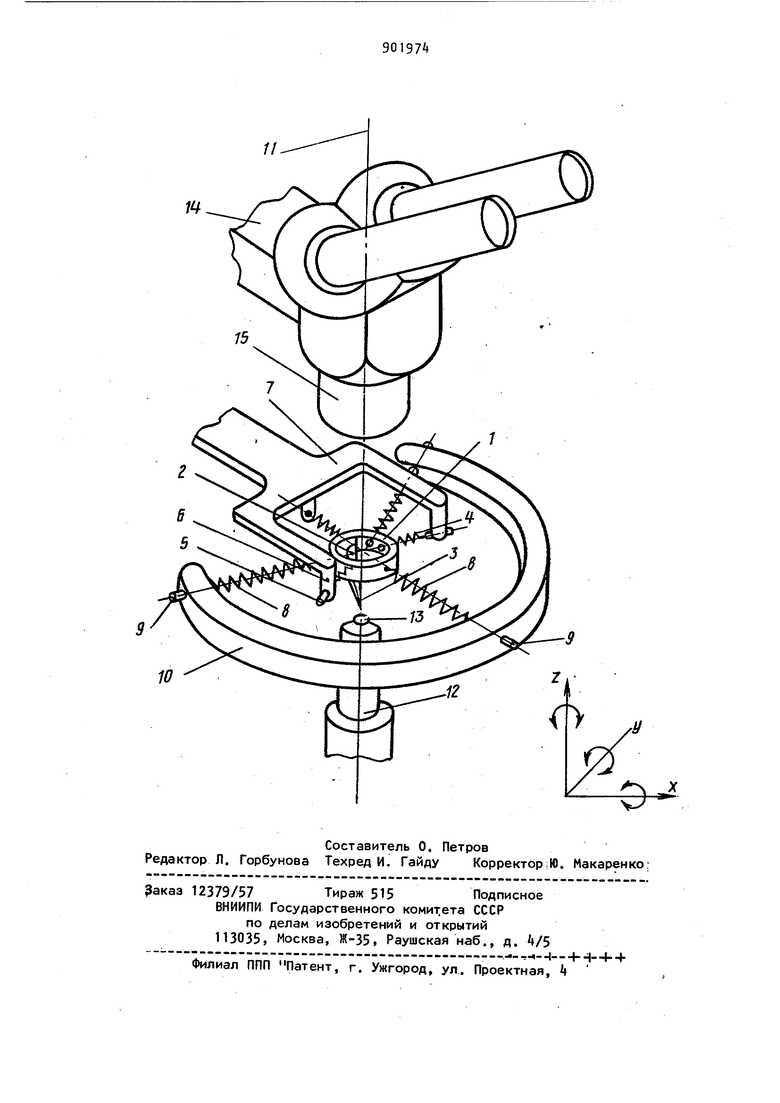
Существенными недостатками микроманипулятора является сложность и многодетальность его конструкции, необходимость прецизионного изготовления ряда узлов и использования при этом высокоточных подшипников и других де талей, необходимость управления двумя руками и полная невозможность микроповоротов держателя объекта около взаимно перпендикулярных осей х и у. Цель изобретения - упрощение конструкции и увеличение числа степеней свободы перемещения рабочего органа, Указанная цель достигается тем, что в микроманипуляторе, содержащем Ъснование, водило и держатель рабоче .го органа, держатель связан с основа нием и с водилом при помощи упругих тел. На чертеже представлен микроманипулятор, общий вид. Держатель 1 инструмента 2, в каче стве которого изображен лабораторный микроскальпель с рабочим острием 3, подвешен на нескопьких, например на трех, жестких упругих телах 4, снабжённых регулировочными винтами 5 к выступам б неподвижного основания 7. При помощи нескольких других менее жестких упругих тел 8, также снабжен регулировочными винтами 9, держа тель 1 связан с водилом 10. Соосно оси 11, проходящей через находящееся в исходном положении рабочее острие 3 инструмента 2, под держателем 1 на об ьектовом столике. Т2 находится подлежащий микроопераци условно изображенный объект 13. Над держателем 1 на штативе t расположен микроскоп 15. Устройства вертика льного перемещения штатива И и столика 12 на чертеже не показаны.. В качестве упругих тел 4 и 8 могу быть использованы не только металлические пружины, но также и тяги из подходящего эластичного материала, например из резины, а регулировочные вин7Ы 5 и 9, с целью увеличения диапазона их действия, могут представ-f лять собой, например, дифференциальные или иные общеизвестные регулировочные элементы. Микроманипулятор работает следующим образом. Для выполнения микроработ на объекте 13 его совмещают с осью 11, при помощи подъемного механизма объектив ного столика 12 приближают к острию 3 и на эту область фокусируют ми|$роскоп 15. Наблюдая в микроскоп 15 оп ратор одной рукой перемещает и, если необходимо, наклоняет и поворачивает в любую сторону водило 10, в результате чего все эти движения в уменьшенном масштабе повторяет закрепленный в держателе 1 инструмент 2. При освобождении оператором водила 10 острие 3 инструмента 2 под действием упругих тел 4 и 8 возвращается в исходную точку на оси 11 . В некоторых наперед заданных пределах, зависящих от конкретной конструкции и ее значения, как водило 10, так и держатель 1 имеют все шесть степеней свободы, т.е. они могут совместно, но при этом на различные расстояния перемещаться в направлении осей X, у и Z и поворачиваться около этих осей. Люфты при этом исключены, а передаточное отношение определяется только соотношением упругостей упругих тел 4 и 8 и не зависит от их геометрических размеров. Поэтому передаточное отношение может быть выбрано в самых широких пределах, начиная, например, с 4:1 до 10000:1 и более. Для гюлучения наибольшего передаточного отношения от водила 10 к держателю 1 упругие тела 4 делают значительно более жесткими , чем упругие тела 8, и придают тем и другим неко-г торое первоначальное натяжение. Данный микроманипулятор характеризуется простотой конструкции и изготовления, абсолютным отсутствием люфтоа, наличием всех шести степеней свободы получаемых движений рабочего органа от одного водила, любым передаточным отношением и возможностью его бесступенчатого регулирования, компактностью конструкции, ее осевой симметричностью и возможностью встраива(ия и сопряжения с любым готовым устройством, например с любым биологическим или иным микроскопом. Формула изобретения Микроманипулятор, содержащий основание, водило и держатель рабочего органа, отличающийся тем, что, с целью упрощения конструкциии увеличения числа степеней свободы перемещения рабочего органа, держатель связан с основанием и с водилом при помощи упругих тел. Источники информации, принятые во внимание при экспертизе 1.Кожевников С. Механизм. М., 1976, с. 591. 2.Моряков 0. Устройство и наладка оборудования полупроводникового производства. М., 1971, с. 133.
