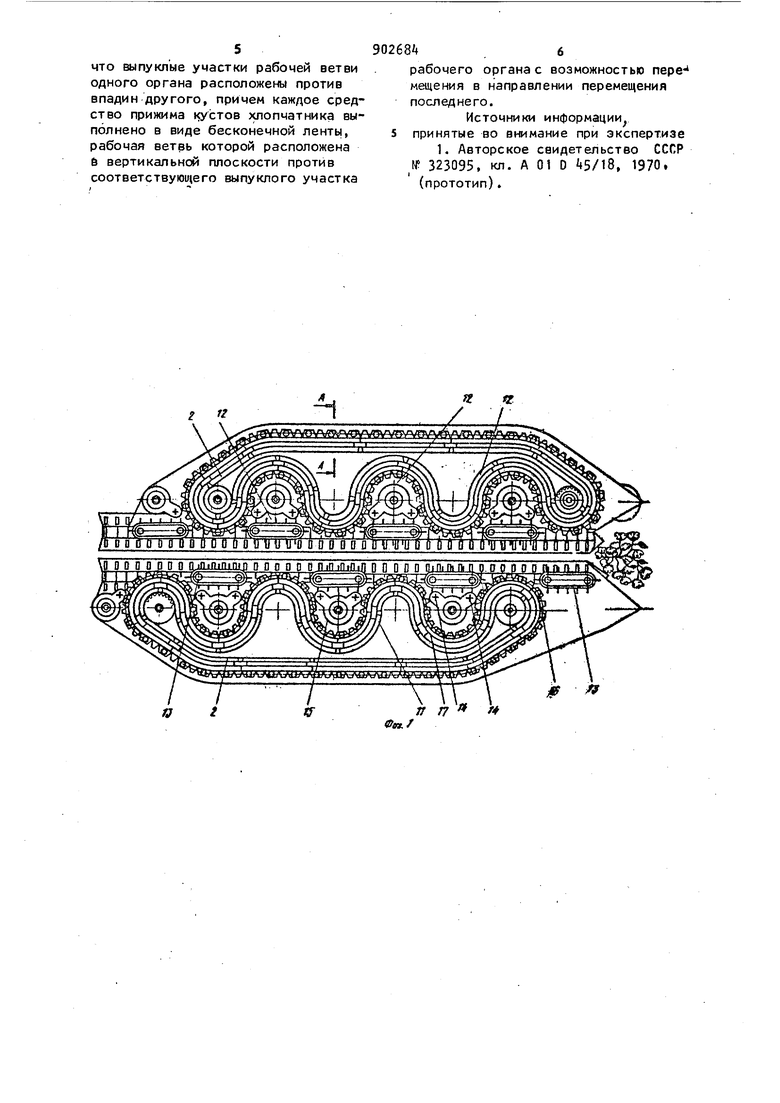
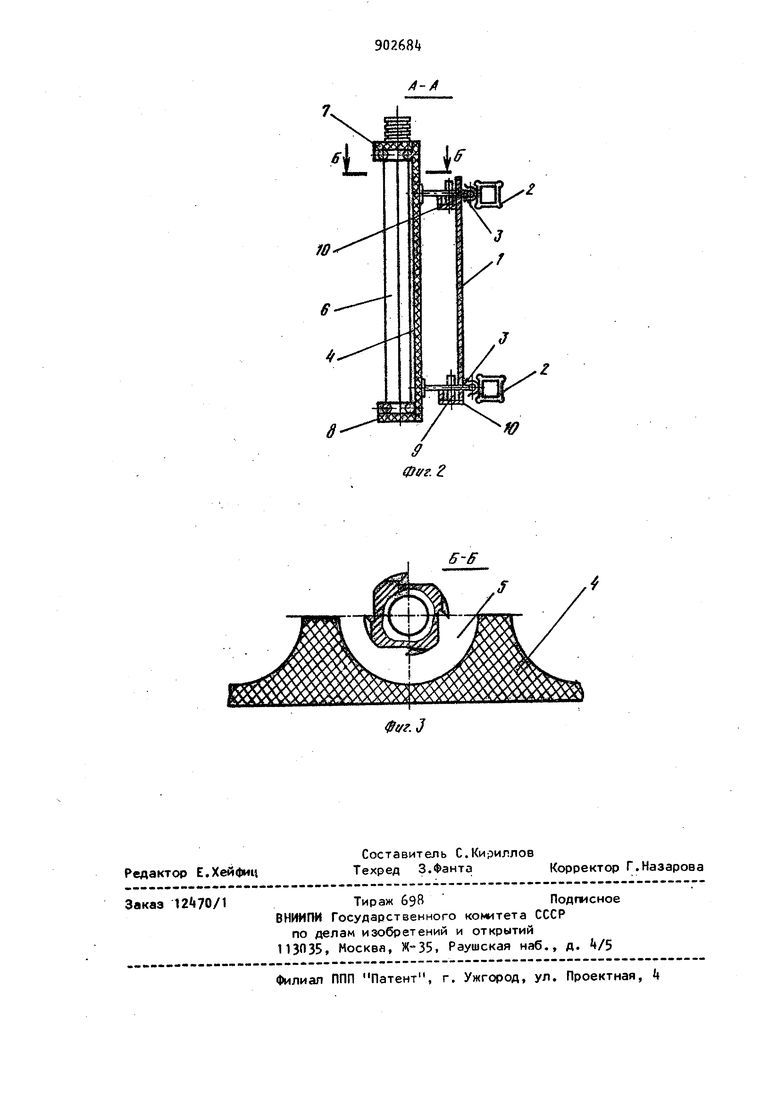
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в аппаратах хлопкоуборочных машин. Известен хлопкоуборочнь1й аппарат включающий вертикальные шпиндели, установленные на бесконечном движущемся в направлении, обратном.движе нию машины, цепном контуре, внутри которого установлена бесконечная лента съемника, направление движения которой противоположно направле нию движения цепного контура, и при емная камера, установленная в передней части хлопкоуборочного аппар та в зоне максимального перегиба ленты съемника П. Однако это устройство собирает хлопок с кустов не полностью из-за того, что шпиндели, встречакниие обрабатываемые кусты первыми, собира основную массу хлопка, перегружаютс роняют его на землю, а задние шпиндели обрабатывают уже обработанною поверхность кустов. Они хотя и недогружены волокном, но оставшийся хлопок не добирают из-за отсутствия переориентации кустов, т.е. перераспределения их плодовых веток. Цель изобретения - повышение эффективности сбора хлопка. Цель достигается тем, что хлопкоуборочный аппарат содержит пару установленных с образованием рабочей щели бесконечных рабочих органов, рабочая ветвь каждого из которых выполнена волнообразной с расположением волн поперек рабочего органа, имеющих вертикально расположенные на них шпиндели, при этом бесконечные рабочие органы установлены со смещением один относительно другого таким образом, что выпуклые участки рабочей ветви одного органа расположены против впадин другого. Хлопкоуборочный аппаратимеет.средства съема хлопка с приемными камерами и средства прижима кустов хлоп-. чатжка к шпинделям, расположенные по обе стороны рабочей щели аппарата, причем каждое средство прижима .кустов хлопчатника выполнено в виде бесконечной ленты, рабочая ветвь которой расположена в вертикальной пло кости против соответствующего выпуклого участка рабочего органа с возможностью перемещения в направлении перемещения последнего. На фиг. 1 схематично изображен Хлопкоуборочный аппарат, вид сверху} на фиг. 2 - связь шпинделя с несущей цепью бесконечного рабочего органа (сечение А-А на . U- на фиг. 3 схема размещения шпинделя в ячеистом полотне (сечение на фиг.2) . Хлопкоуборочный аппарат содержит смонтированную на каркасе 1 пару бесконечных цепных рабочих органов 2, На звеньях верхней и нижней цепей закреплены поводки 3, несущие полотно из резины j, выполненное с ячейками 5, в которых вертикально расположены шпиндели 6. Последние установлены в шарикоподшипниковых опорах 7 и 8 приливов полотна А. В поперечном разрезе каждая ячейка 5 полукругом охватывает установленный в ней шпиндель. Поводки 3 в сред ней части снабжены опорным роликом 9 входящим в направляющую канавку 10, обеспечивающую волнообразную форму рабочей ветви бесконечного органа 2 с поперечным расположением волн, при этом бесконечные рабочие органы 2 установлены со смещением один относительно другого в направлении перемещения аппарата таким образом, что выпуклые участки 11 рабочей ветви о ного органа расположены против впадин 12 другого. Против выпуклых участков рабочих органов расположены сред ства прижима 13 кустов хлопчатника, каждое из которых выполнено в виде бесконечной ленты, рабочая ветвь которой расположена в вертикальной пло кости , а направление ее пе1Ьемещения совпадает с направлением перемещени рабочей ветви бесконечного органа 2 Во впадинах 12 бесконечных рабочих органов 2 размещены средства съема хлопка, включающие съемники 14 и при емные камеры 15. На выпуклых участках 11 и во впадинах 12 бесконечных рабочих органов шпинделям 6 сообщается реверсивное вращательное движе ние посредством дорожек 16 и 17. При работе хлопкоуборочного аппаата куст хлопчатника, попадая в раочую щель, обрабатывается сначала с одной стороны шпинделями б выпукого участка 11 одного бесконечного рабочего органа 2, а с другой стороны поджимается одним из средств прижима 13 расположённым напротив выпуклого участка 11. При дальнейшем продвижении куста хлопчатника вдоль рабочей щели аппарата он обрабатывается шпинделями 6 выпуклого участка 11 противоположного бесконечного рабочего органа 2 со стороны, где первоначально осуществлялся прижим, а прижим куста теперь происходит с другой стороны. Такое попеременное воздей.ствие способствует активной переориентации плодовых элементов кустов хлопчатника относительно обрабатывающих шпинделей, что повышает эффективность сбора хпопй:а. Бесконечной ленте, средств прижима 13 можно задать скорость перемещения, отличную от скорости перемещения рабочей ветви рабочего органа 2. Из зоны рабочей щели шпиндели 6 с намотанным на них хлопком подают во впадимы 12 рабочего органа 2, где они подвергаются реверсивному вращательному движению и обработке съемниками 1A. Снятый со шпинделей хлопок сбрасывается в приемную камеру 15. Применение хлогжоуборочного аппа(эата Анвара Рустамова повышает эффективность уборки хропка с кустов хлопчатника. Формула изобретения Хлопкоуборочный аппарат, содержа-, щий пару, установленных с образованием рабочей щели бесконечных рабочих органов с вертикально расположенными шпинделями и расположенные вдоль рабочего органа средства съема хлопка с приемными камерами, о т л и ч а )бщ и и с я тем, что, с целью повышения эффективности сбора хлопка, ов имеет средства прижима кустов хлопчатника к шпинделям, расположенные по обе стороны рабочей щели аппарата, а рабочая ветвь каждого бесконечного органа выполнена волнообразной с расположением волн поперек рабочего органа, при этом бесконечные pa6oi ie органы установлены со смещением один относительно другого в направлении перемещения аппарата таким образом.
что выпуклые участки рабочей ветви одного органа расположены против впадин другого, причем каждое средство прижима кустов хлопчатника выполнено в виде бесконечной ленты, рабочая ветвь которой расположена б вертикальной плоскости против соответствующего выпуклого участка
902684б
рабочего органа с возможностью nepe- мещения в направлении перемещения последнего.
Источники информации 5 принятые во внимание при экспертизе 1, Авторское свидетельство СССР 5 323095, кл. А 01 D itS/lB, 1970. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 1991 |
|
RU2028036C1 |
| Вертикально-шпиндельный хлопкоуборочный аппарат | 1990 |
|
SU1761033A1 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 2005 |
|
RU2300186C2 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 1972 |
|
SU323095A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1371592A1 |
| Пневматический хлопкоуборочный аппарат | 1989 |
|
SU1746933A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1107783A1 |
| Способ уборки хлопка-сырца | 1987 |
|
SU1628918A1 |
| Вертикально-шпиндельный хлопкоуборочный аппарат | 1988 |
|
SU1711710A1 |
| Хлопкоуборочный аппарат | 1984 |
|
SU1202512A1 |
г г
Б-S
фуг.З
