Изобретение откоштся к оборудованию для проведения комплексных испытаинй готовой обуви яа износ и может быть использовано в обувной промышленности, где в настоящее время основным способом комплексного /определения качества готовой обуви является опытная носка. Недостатком опытной носки является ее длительность и сложность контроля за изменением эксплуатационных характеристик обуви в процессе ее проведения. Известны устройства для определения некоторых эксплуатационных характеристик компонентов готовой обуви, например, приборы для определения жесткости и упругости носков, подносков и задников, определения обще и остаточной деформации подноска и задника, для измерения степени стабилизации и сохранения формы верха у обуви. 1. Известен прибор, предназначенньш для испытаний иа износостойкость деталей низа обуви и узлов их соединения с ее верхом 2. Прибор содержит подпружиненную опорную площадку установленный над ней рабочий орган, привод, механизм для натяжения верха обуви и захваты для удержания ее подощвы, установленные на боковых сторонах опорной площади с возможностью их регулирования по высоте. При этом опорная площа;1ка имеет выемку под испытываемые детали, а рабочий орган вьшолнен в виде диска, установленного на коленчатом валу привода. Недостатками этого и других подобных приборов является то, что они не создают возможности определения влияния полной совокупности условий эксплуатационной носки иа состояние обуви в целом, ограничиваясь исследованием влияния изолированных факторов лишь на ее отдельные топографические участки и элементы конструкции. Наиболее близким техническим решением к изобретению является машина для экспериментальнсж носки, которая содержит расположенные на станине платформу с абразивным покрытием и щарнирно закрепленную на дер- , жателе модель ноги, кинематически связанную с пртсводом перемещения ее относительно платформы, П1Ж этом кольцевая платформа
с абразивным покрытием и привод модели, предназначенный для взаимодействия с платформой моделей ног для крепления на них испытьшаемой обуви, шарнирно прикреплены к держателям, смонтированным радиально на четырех ступицах. Ступицы закреплены с возможностью поворота на концах крестовины, имеющей возможность вращаться в горизонтальной плоскости, параллельной платформе на вертикальном валу, кинематически связанной с приводом 3.
Ступицы с держателями и закрепленными на них моделями, обутыми в испытываемую обувь, образуют своего рода колеса, обкатывающиеся о поверхность покрытия платформы 55
при вращении крестовины. В процессе этого обкатывания нагрузка на каждую модель передается с пятки на носок, что имитирует, хотя и с недостаточной достоверностью, условия работы обуви при ходьбе.
Маилина позволяет проводить комплексные испытания готовой обуви, однако создаваемая ею схема нагружения испытываемых образцов далеко не полностью воспроизводит условия реальной носки. Так, машина не в состоянии имитировать проскальзывание низа обуви относительно дорожного покрытия при ходьбе и беге и, кроме того, она не позволяет имитировать условия эксплуатации обуви при ходьбе по пересеченной местности.
Цель изобретения - расширение экспериментальных возможностей за счет приближе1ШЯ условий экспериментальной носки к реальной имитации проскальзывания низа обуви относительно дорожного покрытия.
Цель достигается тем, что мащина для экспериментальной носки имеет раму с направляющими, закрепленную на станине, подпружиненную тележку, на которой установлена платформа с абразивным покрытием и размещенную на направляющих рамы, а привод перемещения модели ноги содержит кинематически связанные между собой механизм возвратно-поступательного перемещения модели в вертикальной плоскости и механизма ее качания в вертикальной плоскости, параллельной направляющим тележкИ; механизм изменения угла наклона рамы к горизонтали и механизм изменения наклона рамы в вертикальной плоскости ее качания.
Механизм возвратно-поступательного перемещения модели в вертикальной плоскости имеет силовой цилиндр, шарнирно закрепленный на станине, один конец щтока которого шарнирно соединен с механизмом качания модели, а второй конец штока установлен на держателе модели.
Механизм качания модели параллельно направляющим содержит силовой цилиндр, закрепленный на станине, шток которого шарнирно связан со штоком силового цилиндра механизма возвратно-поступательного перемещения модели. Механизм изменения угла наклона рамы к горизонтали имеет пару силовых цилиндров, штоки которых шарнирно соединены с рамой посредством рычажного механизма.
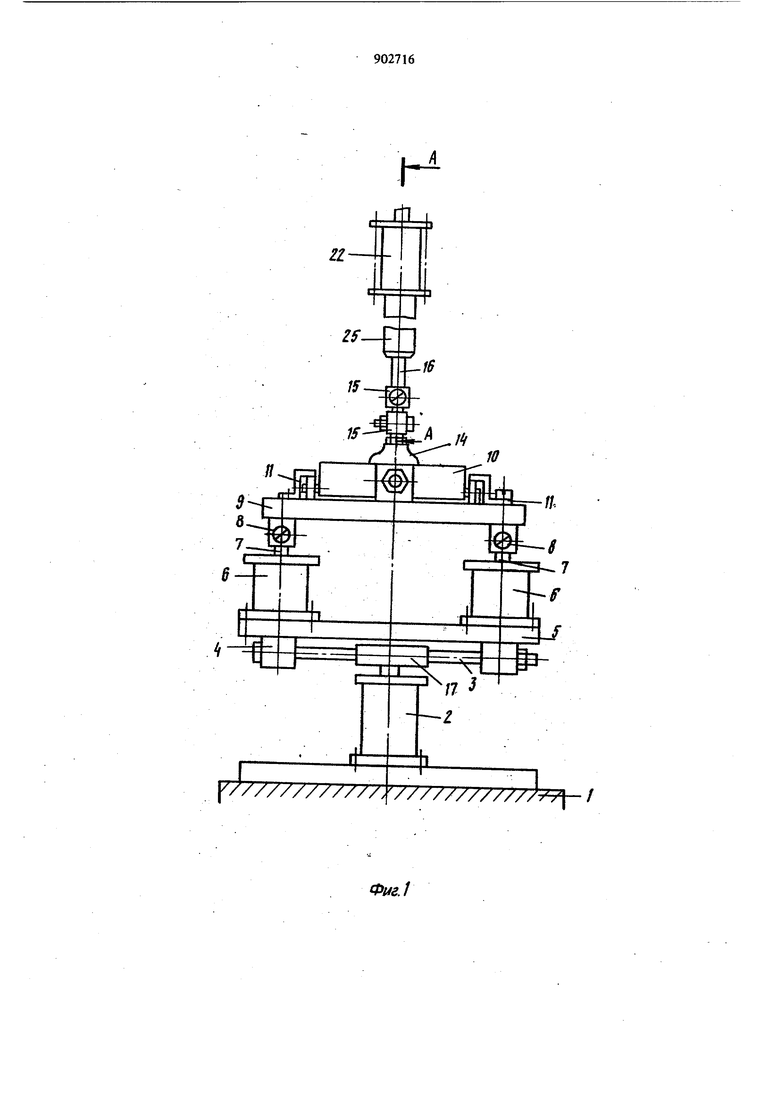
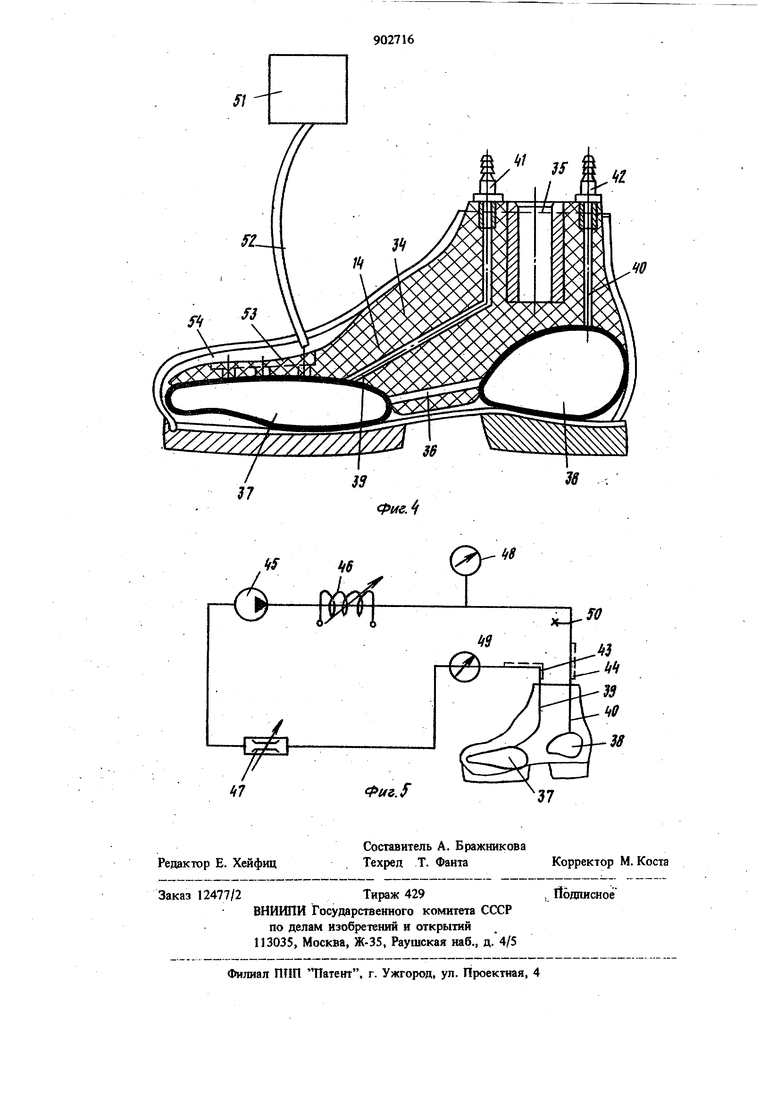
На фиг. 1 представлена мантана, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 модель ноги, разрез; на фиг. 5 - принципиальная схема источника нагретого сжатого воздуха для обогрева модели.
Маигина для экспериментальной носки обукреплены корпусы двух вертикально расположенных силовых цилиндров, например пневмоцилиндров 2. На штоках последних закреплены поперечины 3, на которых при помощи
шар -шрных соединений 4 смонтирована рама 5. На раме 5 закреплены корпусы двух силовых цилиндров б, например пневмоцилиндров, на штоках которых закреплены поперечины 7, а на поперечинах 7 щ помощи шарнирных
соединений 8 смонтирована рама 9 с регулируемым упором для ограничения хода тележки 10, имеющая сверху платформу с направляющей поверхностью для опирающейся на нее своими колесами тележки 10. Для предотвращения бокового смешения тележки и предотвращения ее отрыва от рамы 9 на последней закреплены ограничительные планки 11. Тележка 10 связана пружиной 12, направление действия которой совпадает с направлением перемешения тележ1си, с прикрепленным к раме 9 кронштейном 13. Платформа тележки 16 имеет покрытие из абразивного материала, например, корунда. На платформу тележки 10 опирается модель 14 ноги с обутым на нее ботинком (фиг. 2). Модель 14 соединена двухосным (шаровым) шарниром 15 с держателем 16, связанным с приводом перемещения модели относительно платформы тележки. Привод содержит кинематически связанные между собой механизм возвратно-поступательного перемещения в вертикальной плоскости модели 14 и механизм ее качания в вертикальной плоскости, параллельной направляющим тележки.
Механизм возвратно-поступательного перемещения в вертикальной плоскости модели 14 содержит шток 17, подвешенный к станине при номощи осевого шарнира 18, ниже которого на штоке 17 закреплен передвижной соединительный шарнир 19, крепление которого к .штоку 17 обеспечивает возможность регулирования его положения по высоте. Нижняя часть штока 17 выполнена в .виде втулки, в которую помешен с возможностью возвратносмонтирована на стаьгане 1, к которой припоступательного перемещения верхний конец держателя 16, ниже которого имеется резьбовой участок 20. На участке между соединител ным шарниром 19 и нижним концом штока 17 закреплен шток 21 пневмоцилиндра 22, имеющего верхнюю 23 и нижнюю 24 крышки с уплотнительными отверстиями для выхода штока 17. К крышке 24 приварен стакан 25, закрытый снизу крышкой 26. В стакан 25 по мещена пружина сжатия 27, размещенная меж ду нижним торцом крышки 24 и гайкой 28, навинченной на резьбовой участок 20 и застопоренной контргайкой 29. Механизм качания модели 14 содержит связанный со станиной I при помощи осевого шарнира 30 пневмоцилиндр 31, поршень 32 и шток 33, оголовок которого связан при помощи соединительного шарнира 19 со щтоком 17 механизма возвратно-поступательного перемещения в вертикальной плоскости модели. Пневмошигандры 22 и 31 являются Наряду с пневмоцилиндрами 2 и 6 элементами пневмосистемы (не показана), в которую так же входят командный злектропневматический прибор (КЭПП) для согласования работы цилиндров 22 к 31. Модель стопы может быть вьтолнена следующим образом. Модель 14 составлена из полиуретанового блока 34, отлитого по форме верхней части стопы заодно с гайкой 35 для крепления модели к двухосному шарниру 15. Снизу к бло ку 34 прикреплены две сообщающиеся между собой при помощи трубки 36 резиновые нагревательные камеры: носочная 37 и пяточная 38, толщина стенок котор(й в 2:2,5 раза больше толщины стенок камеры 37. Через трубки 39 и 40 камеры 37 и 38 соединены .с ниппелями 41 и 42, которые предаазначены для соединения нагревательных камер с источ ником нагретого сжатого воздуха, который (фиг. 4) выполнен в виде пневмосхемы, соединенной с ниппелями 41 и 42 при помощи гибких шлангов 43 и 44 и содержащий пиевмонасос 45, злектронагреватель 46 с регулируемой температурой подогрева, дроссельный клапан 47 с регулируемым сопротивлением, манометр 48, термометр 49 и кран 50 для соединения источника с атмосферой. Мацшна может быть снабжена системой подачи потоимитирующей жидкости, включающей резервуар для жидкости 51, закрепленньй ,на станине 1, соединительную гибкую резиновую трубку 52 и примыкающий к ней Капиллярный шнур 53, заложенный в фигурный паз 54, вьшо;шенный в верхней части блока 34. Для имитации мышц ноги (сгибатели и разгибатели стопы), модель 14 стопы ХФиг-3) связана с держателем 16 двухосного (или шарового) шарнира 15 при помощи уравновешивающих пружин 53, крепящихся к планке 56, устанавливаемой вдоль продольной оси колодки в ее пяточной и голеночной частях. Машина работает следующим образом. Перед началом зкспериментальной носки при невключенном насосе 45 и открытом кране 50 шток 33 пневмоцилиндра 31 перемещают влево по отношению к плоскости (фиг. 2) и поднимают вверх пневмоцилиндр 22. Вследствие .этого модель 14 занимает крайнее верхнее левое положение, в котором на нее одевают испытьтаемый образец обуви. Одевание образца не сопряжено, с какими-либо затруднениями, поскольку нагревательные камеры 37 и 38, будучи сообщенными с атмосферой, не оказывают никакого сопротивления сгибанию стопы. Перекрывают кран 50, приводят в действие насос 45 и включают злектроподогреватель 46, после чего включают командный злектропневматический прибор, по команде которого начинают срабатьгоать пневмощшиндры 22 и 31 в следующей последовательности. Сначала пневмоцшшндр 22 опускается вниз до упора образца обуви краем каблука в платформу тележки 10, затем срабатывает пневмоцилиндр 31, осуществляюпрш качание модели вправо, в ходе которого образец обуви взаимодействует с платформой тележки 10 сначала каблуком, затем всей поверхностью подошвы и в конце только ее носовой частью. Во время кайния вправо тележка 10, вступив во взаимодействие с образцом обуви, также движется с ним вправо до упора, ограничивающего ход тележки, расгяпюая пружину 12. Возникающее при зтом между платформой тележки 10 и образцом обуви усилие сжатия воспринимается пружиной 27. После остановки тележки 10 происходит истирание подоошы обуш, движущейся вправо, о покрытие платформы. В конце качания впра во это усилие становится недостаточным для удержания тележки 10 в контакте с образцом, и под действием пружины 12 она выскальзывает влево, что сопровождается дополнительным истиранием низа обуви абразивным покрытием ее платформы. Вслед за этим пневмощшиндр 22 поднимается вверх, а пневмоцилиндр 31 осуществляет качание модели 14 . с образцом обуби влево в ее исходное крайнее левое положение, после чего работа пневмоцилиндров 22 и 31 повторяется в течение установленного времени испытания или до заданного износа в описанной выше последовательности. В зависимости от вида обуви испытания могут продолжаться от 2
.до 5 суток, в течение которых машина мо, жат осуществить от 60 до 200 тыс. описанных циклов при продолжительности каждого, из них от 2 до 3 сек. В продолжение испытаний по манометру 4 следят за давлением в камерах 37 и 38, которые при помощи дросселя 47 удерживают на уровне 36-38°С путем регулирования мощности электроподогревателя 46. Вследствие того, что толщина стенок пяточной камеры 38 в 2-2,5 раза болыйе толидины сте нок носочной камеры 37, .расщирение последней в 2-2,5 раза превышает растяжение пяточ ной камеры 38, что имитирует характер расширения человеческой стопы в процессе ходьбы. Регулирование усилия прижатия образца к поверхности платформы тележки Ш выполняют путем регулирования положения гайки 28 на резьбовом участке 20 держателя 16, а регулирование величины щага модели 14 проводят путем изменения положения соединитель кого шарнира 19 на щтоке 17. Для имитации ходьбы вниз и вверх по наклонной поверхности раму 9 наклоняют по отношению к горизонтальной плоскости при помощи пнев моцилиндров 2, для имитации ходьбы или бега без изменения уровня по пересеченной мес ности ее наклоняют по отнощению к вертикальной плоскости, в которой происходит качание .модели 14, припомощи пневмоцилиндров 6. Экономический эффект от использования изобретения в масиггабах страны составит 288 тыс. руб. в год. Формула изобретения 1. Машина для экспериментальной носки обуви, содержащая расположенные на станине платформу с абразивным покрытием и шарнирно закрепленную на держателе модель ноги, кинематически связанную с приводом перемещения ее относительно платформы, о тличающаяся тем, что, с целью ра ширения экспериментальных возможностей за
счет приближе1шя условий к реальной имитации проскальзывания низа обуви относительно :Дорожного покрытия, она имеет раму с направляющими, закрепленную на станине, подпружиненную тележку, lia которой установлена платформа с абразивным покрытием и размещенную на направляющих рамы, а привод перемещения модели ноги содержит кинематически связанные между собой механизм возвратно-поступательного перемещения модели в вертикальной плоскости и механизм качания ее в вертикальной плоскости, параллельной направляющим тележки, механизм изменения угла наклона рамы к горизонтали и механизм изменения наклона рамы в вертикальной плоскости ее качания. 2. Мащина по п. 1, о т л и ч а ю щ ая с я тем что механизм возвратно-поступательного перемещения модели в вертикальной плоскости имеет силовой цилиндр, шариирно закрепленный на cratmne, одан конец штока которого щарнирно соединен с механизмом качания модели, а второй конец штока установлен на держателе модели. 3.Машина по п. 1,отличающая с я тем, что механизм качания модели параллельно направляющим содержит с1Довой 1ЩЛИНДР, закрепленный на ста1тне, шток которого иирнирно связан со штоком силового цилиндра механизма возвратно-поступательного перемешения модели. 4.Машина по п. 1,отличающая с я тем что механизм изменения утла наклона рамы к горизонтали имеет пару силовых цилиндров, штоки которых щарнирно соединены с рамой посредством рычажного механизма. Источники информации, принятые во внимание при экспершзе 1.Патент ПНР Г 83705, кл. G 01 N 33/44, 1967 . 2.Авторское свидетельство СССР № 411350. кл. G 01 N 3/56, 1974. 3.Патент США № 2638776, кл. 73-7, 1969 (прототип).



| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для экспериментальнойНОСКи ОбуВи | 1979 |
|
SU847981A1 |
| АМОРТИЗИРУЮЩИЙ КАБЛУК С ПНЕВМОКАМЕРОЙ ДВУХСТОРОННЕГО ДЕЙСТВИЯ | 2010 |
|
RU2424751C1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| Устройство для испытания протеза бедра на долговечность | 1987 |
|
SU1477402A1 |
| ЭКСТРУЗИОННО-РАЗДУВНАЯ ФОРМОВОЧНАЯ МАШИНА | 2001 |
|
RU2186683C1 |
| Устройство для регулирования положения заготовки верха обуви в зависимости от положения рабочего инструмента | 1986 |
|
SU1832004A1 |
| Устройство смены кассет с резаками для пресса по обработке деталей обуви | 1988 |
|
SU1639843A1 |
| Устройство для испытаний материалов на износ и трение | 2024 |
|
RU2825725C1 |
| Агрегат для снятия ворса с наружной поверхности валяной обуви | 1988 |
|
SU1664260A1 |
| Установка для металлизации изделий | 1987 |
|
SU1595576A1 |


Фиг. / гг tt; 3Z XfvX 31 30
2
Фиг.З
