(54) РЕГУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1980 |
|
SU907511A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Регулятор | 1981 |
|
SU945849A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Устройство для компенсации запаздываний | 1986 |
|
SU1409966A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
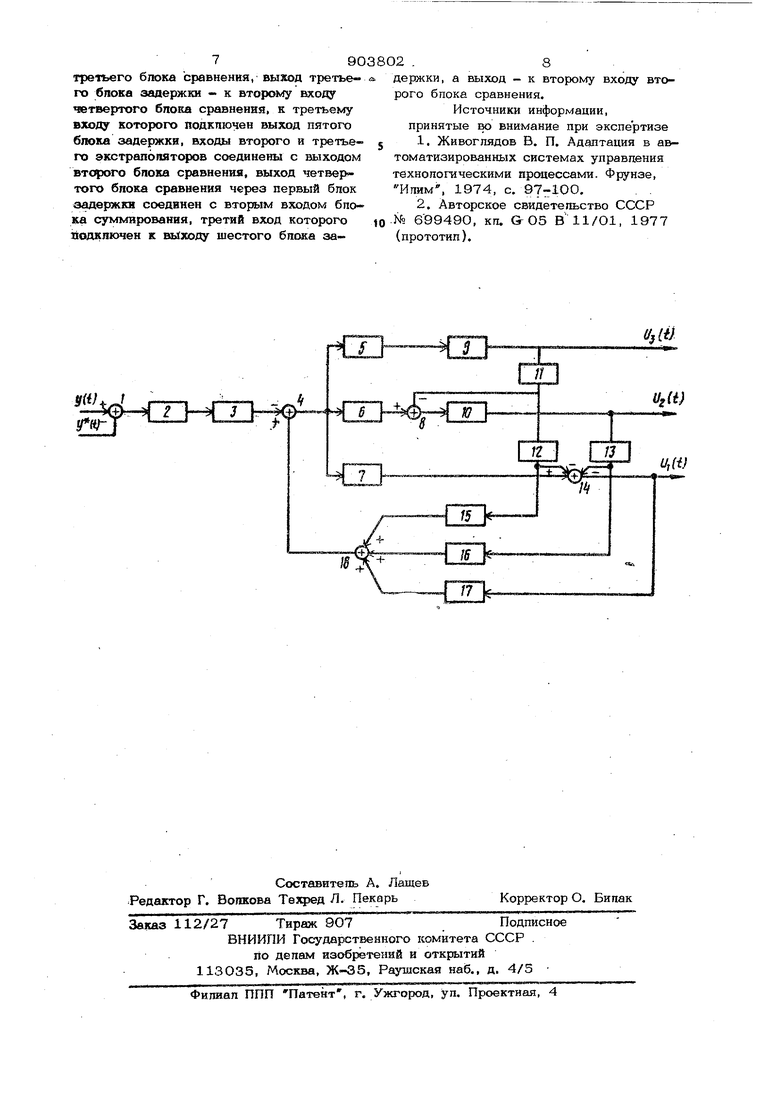
Изобретение относится к области авгоматического управпення и может быть использовано для построения систем управления техническими объектами. Динамика объекта достаточно хорошо аппроксимируется оператором . р 1 X с й и, (Р). Uj (Р) и,1Р)1, коэффициент усиления К и постоянные времени Т иТ,Т,,Т которого незначительно изменяются в течение длительности переходного процесса. Объект име ет три управляющих вз5.ода и один выход п аналогии можно брать и объекты с И 1, 2, 3,к,. управляющими воздействиями. Характеристики каналов регулирования имеют различные транспортные запаздывания, причем Т г. з Объект подвержен влиянию неконтрол руемъ1х внешних возмущений, прилагав- мых в различных точках и характеризуемых составляющими с различным интервалом спада автокорреляционных функций. Примером такого рода объектов служат системы непрерывного дозирования материала на нескольких бункеров на одну транспортерную ленту, на которой и ;Производится взвешивание суммарной массы отдозированного материала. Целью управления является обеспечение инвариантности регулируемой координаты от внешних воздействий. -Известен регулятор, содержащий последовательно соединенные обратную модель объекта без запаздывания, экстраполятор и сумматор, в котором косвенно оцениваются характеристики внешних воздействий, полученнъш оценки прогнозируются на ..интервалы запаздывания и используются для выработки управлений 1. Однако эти регуляторы функционируют ври условии, что число прямо или косвенно измеряе п 1х выходных переменных объекта равно числу управляющих воздействий. Поэтому такие регуляторы 39 не применимы дпя описанного класса объ ектов. Наиболее близким по технической сущ ности к предлагаемому является регулятор, содержащий первый бпок задержки . и последоватетхьно соединенные первый блок сравнения, фильтр низкой частоты, обратную модель объекта без запаздывания, второй блок сравнения и первый экс траполятор 21. Недостатком известного регулятора является то, что для описанного класса объектов его применение возможно при настройке на среднее значение Т.. Однако при этом не компенсируются высокочастотные составляющие возмущений, что приводит к низкой точности регулирования. Цепь изобретения - повышение точнос ти регулирования. Поставпенная цель достигается тем, что в регулятор, содержащий поспедовательно соединенные первый блок сравнения, фильтр низкой частоты, обратную модель объекта без запаздывания,второй бпок сравнения и первый экстрапопятор, а также первый бпок задержки, введены последовательно соединенные первый мае щтабирующий блок, второй блок задержки, третий блок задержки, четвертый блок задержки и блок суммирования, последовательно соединенные второй экст- раполятор, третий бпок сравнения, второй масштабирующий блок, пятый блок задержки и шестой блок задержки, после довательно соединенные третий экстрало лятор и четвертый блок сравнения, причем вход первого масштабирующего блок соединен с выходом первого экстраполя тора, выход второго блока задержки под ключен .к второму входу третьего блока сравнения, выход третьего блока задержки - к второму входу четвертого блока сравнения, к третьему входу которого- подключен выход пятого блока задержки, входы второго и третьего экстраполяторов соединены с выходом второго блока сравнения, выход четвертого блока сравнения через первый блок задержки соединен с вторым входом блока суммирования, третий вход которого подключен к выходу шестого блока задержки а выход - к вторсяиу входу второго 6ftoка сравнения. На чертеже схематично представлен автоматический регулятор (где | (i) - и меряемый выходной сигнал, tj(i)- задан 2 ный сигнал,и, (4)j Uj(t), U.Ct-) сигналы управляющих возаействий). Регулятор Содержит первый бпок 1 сравнения, фильтр 2 низкой частоты, обратную модель 3 объекта без запаздывания, второй блок 4 сравнения, первый экстраполятор 5, второй экстраполятор 6, третий экстраполятор 7, третий блок 8 сравнения, первый масштабирующий блок 9, второй масштабирующий блок 1О, второй блок 11 задержки, третий блок 12 задержки, пятый блок 13 .задержки, четвертый блок 14 сравнения, четвертый блок 15 задержки, шестой блок 16 задержки, первый блок 17 задержки и блок 18 суммирования. Регулятор работает следующим образом. Из измеряемого сигнала u(t) в первом блоке сравнения вычитается задан ный сигнал ). Полученный сигнал по ступает на вход фильтра 2 низкой частоты, в котором подавляется высокочастотная помеха. С выхода фильтра 2 низкой частоты сигнал поступает на обратную модель 3 объекта без запаздывания, с выхода которой сигнал идет на первый вход второго блока 4 сравнения, где этот сигнал вычитается из сигнала, поступающего с выхода блока 18 суммирования. На блок 18 суммирования поступают сигналы об управляющих воздействиях , Uj(-t)UjCt) задержанные в блоках зацэржки. Сигнал UjC-t) задерживается в блоке 11 задержки на время Тг-Т , в блоке 12 - на время Г, -Т и в блоке 15 - на время Г , т е. сигнал U, Шза сигдерживается Б сумме на время tj, HanU(t) задерживается в блоке 13 задержки на время и в блоке 16 на время 1. В сумме сигнал Uj(i:) задерживается на время Tj. Сигнал ЦДО задерживается в блоке 17 задержки на время t, Тем самым сигналы об управл$пощих воздействиях совмещаются по времени таким образом, чтобы составляющие выходной переменной, обусловленные этими управлениями, приводились к одному временному срезу. В результате на выходе второго блока 4 сравнения получается сигнал о эквивалентном идеальном управлении UjKgtt) т.е. таком управлении, которое надо было реализовать, чтобы получить выходную переменную ( (t) равную ее заданному значению и (t) «,tt) Ui(t-tj,) + Ujtt-r5)) Al,Ct)y(t-.,(t), гдеди()- сглаженное в фильтре 2 низкой частоты значение ДЧ W j W - обратная модель объекта без запаздывания. С выхода второго блока 4 сравнения сигнал UgifjCi) поступает на входы первого 5, второго 6 и третьего экстраполяторов, например, реальных форсирукицих звеньев. В экстраполяторе 5 сигнал экс раполируется на интервал времени Xj в экстраполяторе 6 - экстрапопяторе 7 - на Т, При этом на более длительный интервал времени эkcтpaпoпиf yется более низкочастотная составляющая .сигнала ). Экстраполированный на интервай времени Т, сигнал экв 4 выкода экс раполятора 5 поступает на вход первого масштабирующего блока 9, где он умножается на Коэффициент 1/3, Полученный сигнал является третьим управляющим воздействием UjCt) экв(4 Задержанный на время Tj-Tj. в блоке 11 задержки сигнал j - (j - вычит ется в третьем блоке сравнения из сигнала поступающего с выхода второго экстраполятора 6, Во втором масщтабирующем блоке 1О, сигнал, полученный в третьем блоке 8 сравнения умножается на коэффициент 1/2 и в результате получаетс сигнал о втором управляющем воздействии ) u,u)-i-{u. ct-tt,-t ()-U, эхе -г -3 г В четвертом блоке 14 сравнения из сигнала, поступающего с третьего экстраполятора 7 вычитается сигнал с выхода второго блока 11 задержки, дополнительно задержанный .-в блоке 12 на интервал времени и сигнал .с выхода второго масщтабирукядего блока 1О, задержанный в блоке 13 задержки на интервал времени tj-T . На выходе-четвер того блока 14 сравнения получается еип нал о первом управляющем воздействии ЦС) т. UjCt-( « Ct-ttj-T yi. Если объект имеет число управлений больше трех,, то по аналогии могут быть 9 26 получены сигналы об и 1, 2, ... управляющих воздействиях ) Y UeCt-(re-tJ }. Управляющие воздействия, рассчитайные по приведенным формулам для каналов регулирования с большим временем L имеют более низкочастотный характер и, тем самым, высокочастотные возмущения подавляются по каналам, имеющим меньшее время С. Кроме того, найденные управления позволяют относительно равномерно загрузитьвсе каналы регулирования. Применение предлагаемого автоматического регулятора позволяет повысить точность воспроизведения задания за счет более полной компенсации как низкочастотной, так и высокочастотной составляющей неконтролируемых возмущений. При дозировании шихтовых материалов агломерационного процесса, как показали результаты моделирования, применение предлагаекгого регулятора позволяет на 20% повысить точность воспроизведения задания на массу шихтового материала, что повышает производительность агломаши- ны примерно на 3%, улучшает стабильность свойств агломерата на 5% и, в итоге, дает эко 1омический эффект около 10О тыс, руб, в год на одну агломашину. Формула изобретения Регулятор, содержащий первый блок задержки и последовательно соединенные первый блок сравнения, фильтр низкой частоты, обратную модель объекта без запаздывания, второй блок сравнения и первый экстраполятор, отличающийся тем, что, с целью повыщения точности регулирования, в него введены последовательно соединенные первый масштабирующий блок, второй, третий и четвертый блок задержки и блок суммирования, последовательно соединенные второй экстрайолятор, третий блок сравнения, второй масштабирующий блок, пятый и шестой блоки задержки, последовательно соединенные третий страполятор и четвертый блок сравнения, причем вход первого масштабирующего блока соединен, с выходом первого экстраполятора, выход второго блока задержки подключен к второму входу
третьего блока сравнения, выход третьего блока задержки - к второму вход четвертого блока сравнения, к третьему входу которого подключен выход пятого блока задержки, входы второго и третьего экстрапопятсфов соединены с выходом блока сравнения, выход четвертого блока сравнения через первый блок задержки соединен с вторым входом б пока суммирования, третий вход которого 1 одкпючен к шЛходу шестого блока задержки, а выход - к второму входу второго блока сравнения.
Источники информации, принятые во внимание при экспертизе
(прототип).
