через второй блок задержки - к второмуГ. второго экстраполятора соединен с входу т ретьего блока сравнения,выход I вторым входом второго сумматора.
1037208
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивное устройство для регулирования объектов с запаздыванием | 1982 |
|
SU1043594A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Система управления | 1984 |
|
SU1244636A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
- 1 .
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем регулирования общетехническими объектами, характеристика каналов регулирования коТ.2РЫХ описывается операторным выражением
v{P),U,(P)e e -K2U2(P)
fo
V - отклонения выходной пегдеременной объекта управления от опорного уровня ,
и и U2 - отклонения первого и второго управляющих воздействий от соответствующих опорных уровней ;
W - отклонения контролируемого внешнего воздействия от опорного уровня; ,К - коэффициенты передачи
по каналам соответственно , , W-y; Сд - время чистого запаздывания в объекте управления ;
f fo время чистого запаздывания в исполнительном блоке первого управляющего воздействия. При этом диапазон отклонений второго управляющего воздействия лежит в диапазоне отклонений первого управляющего воздействия., Объект подвержен влиянию неконтролируемых воздействия с нестационарными статистическими свойствами.
Задача управления заключается в поддержании выходной переменной :у н заданном значении У при условии минимизации второго управляющего воздействия.
Примерами описанных объектов могут служить объекты черной металлургии. В частности, при шихтовке электроплавки для получения заданного.содержания углерода в металле при его расплавлении рассчитывают массу металлолома и углеродосодержащих добавок с требуемым количеством углерода в металлошихте ( первое управляющее воздействие ). Для подготовки и транспортировки металлошихты тре. буется время, за которое может быть проведено несколько плавок, т.е.
существует значительное запаздывание в исполнительном блоке первого управляющего воздействия. По ходу электроплавки могут производиться подвалки углеродосодержащих добавок
(второе управляющее воздействие). Здесь чистое запаздывание о услав.ливаетсяТОЛЬКО чистым запаздыванием TO объекта по каналу регулирования .Контролируемым внешним воздействием является, в частности, процентное содержание углерода в углеродосодержащих добавках„ Для регулирования объектов с запаздыванием известен регулятор,
содержащий последовательно включенные первый блок сравнения, фильтр низкой частоты, обратную модель объекта, второй блок сравнения, экстраполятор,и блок задержки,выход ко: торого соединен с вторым входом второго блока сравнения 1.
Недостаток этого регулятора заключается в низкой точности регулирования, обусловленной тем, что не учитывается второе управляющее
воздействие.
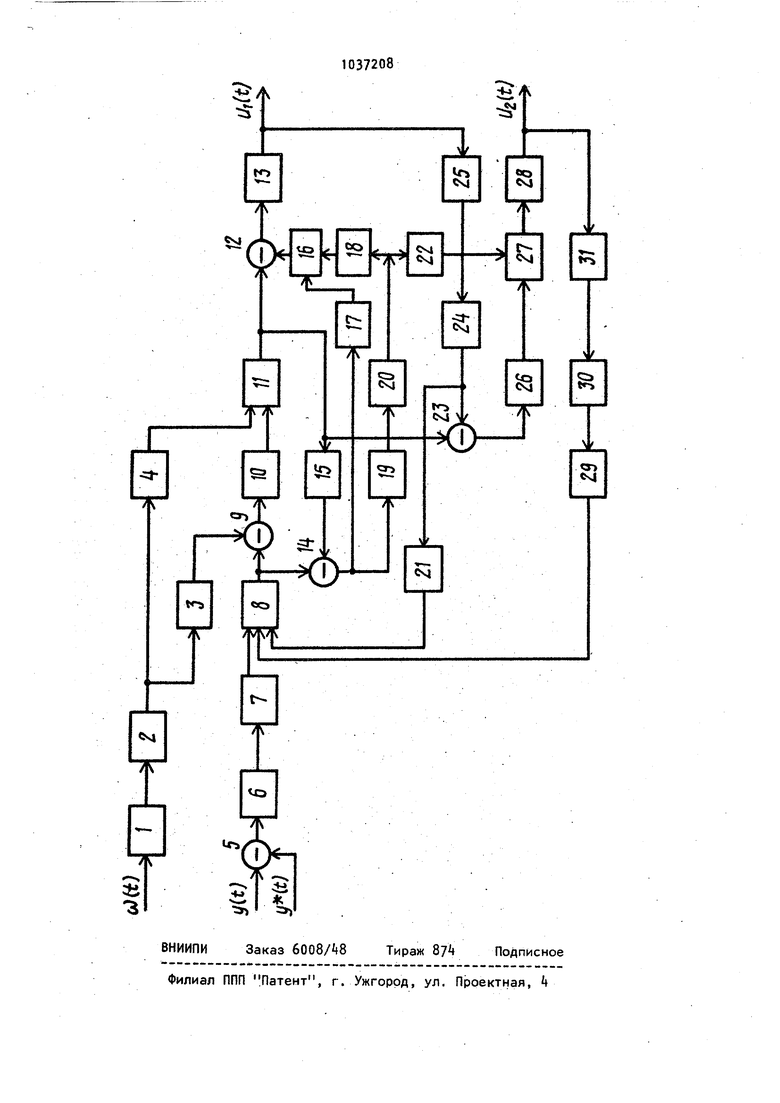
Наиболее близким по технической сущности к изобретению является регулятор, содержащий последовательно включенные первый блок сравнения, фильтр низкой частоты, обратную модель объекта, второй блок сравнения, первый экстраполятор,третий блок сравнения, первый масштабирующий блок, первый блок задержки, второй блок задержки и сумматор, выход которого соединен с вторым входом второго блока сравнения последовательно включенные второй экстраполятор, второй масштабирующий блок, третий, четвертый и пятый блоки задержки, последовательно вклю ченные третий экстраполятор, блок вы читания и шестой блок задержки, при чем второй вход сумматора соединен с выходом пятого блока задержки, а третий вход - с выходом шестого бло ка задержки, выход второго блока сравнения подключен к входам второг и третьего экстраполяторов, выход первого блока задержки соединен с вторым входом третьего блока сравнения, выход третьего блока задержки - с вторым выходом блока вычитания, выход пятого блока задержки с т ретьим входом блока вычитанияС2 При работе регулятора с помощью блоков задержки и сумматора определ ется эквивалентное управление, из которого вычитается корректировка управления, найденная с помощью пер вого блока сравнения, фильтра низкой частоты и обратной модели объекта, в результате чего получаются оценки идеальных эквивалентных упра лений. Эти оценки экстраполируются на различные интервалы времени, а затем с помощью масштабирующих блок и блоков сравнения определяются управления по каждому каналу регулирования. Недостатком известного регулятор является то, что затраты ресурсов на управление по каждому каналу регулирования распределяются равномерно. Для описываемого же класса объектов необходимо уменьшить затра ты на управление по каналам с меньшим запаздыванием ( второе управляющее воздействие ), так как на управление именно по этому каналу расходуются дорогостоящие материалы. Например, при ведении электроплавки расходуется большое количество дор гостОящего и дефицитного науглерож вателя чугуна. Цель изобретения - уменьшение затрат на управление за счет перераспределения ресурсов между управляющими воздействиями таким образом что производилась минимизация доро гостоящих управляющих воздействий. Поставленная цель достигается ем, что в регулятор, содержащий два асштабирующих блока, первый экстраолятор, три блока задержки, первый/ лок сравнения, два исполнительных лока, последовательно соединенные второй блок сравнения, первый фильтр низкой частоты и обратную модель объекта,последовательно соединенные третий блок сравнения и второй зкстраполятор, последовательно соединенные четвертый блок задержки и первый сумматор, последовательно соединеннее пятый блок задержки и четвертый бвок сравнения, введены пятый блок сравнения, второй, третий и четвертый фильтры низкой частоты, второй сумматор, третий и четвертый масштабирующие блоки, последовательно соединенные сигнум-реле и блок умножения, последовательно соединенные блок определения модуля, пятый фильтр низкой частоты, пятый масштабирующий блок и ограничитель, подключенный вторым входом чеоез третий масштаби-. рующий блок к выходу пер&ого блока сравнения, а выходом через последовательно соединенные второй исполнительный блок, четвертый фильтр низкой частоты, первый блок задержки и четвертый масштабирующий блок к второму входу первого сумматора, выход первого исполнительного блока через последовательно включенные третий фильтр низкой частоты и третий блок задержки соединен с входом четвертого блока задержки и с первым входом первого блока сравнения , соединенного вторым входом с входами пятого блока задержки и пятого блока сравнения и с выходом второго сумматора, выход, пятого фильтра низкой частоты соединен через последовательно включенные второй масштабирующий блок, блок умножения и пятый блок сравнения с входом первого исполнительного блока,третий вход первого сумматора соединен с выходом обратной модели объекта, а выход первого сумматора - с первым входом третьего блока сравнения и через четвертый блок сравнения - с входом блока определения модуля и входом сигнум-реле, выход второго фильтра низкой частоты соединен с входом первого масштабирующего блока, подключенного выходом через первый экстраполятор к первому входу второго сумматора и через второй блок задержки - к второму входу третьего блока сравнения, выход второго экстраполятора соединен с вторым входом второго сумматора. На чертеже приведена блок-схема регулятора, на которой приняты следу ющие обозначения: i/ - выходная переменная объекта управления; v - задание на выходную переменную объекта управления - отклонение контролируемого внешнего воздействия от опорного уровня; U и U-- первое и второе управляющие воздействия. Регулятор содержит второй фильтр 1 низкой частоты, первыймасштабирующий блок 2, второй блок 3 задержки первый экстраполятор j, второй блок 5 сравнения, первый фильтр 6 низкой частоты, обратную модель 7 объекта, первый сумматор 8, третий блок 9 сравнения, второй экстраполятор 10, второй сумматор 11, пятый блок 12 сравнения, первый исполнительный блок 13 четвертый блок 1 сравнения пятый блок 15 задержки, блок 16 умно жения, сигнум-реле 17, второй масшта бирующий блок 18, блок 19 определения модуля, пятый фильтр 20 низкой частоты, четвертый блок 21 задержки, пятый масштабирующий блок 22, первый блок 23 сравнения, третий блок 2k задержки, третий фильтр 25 низкой частоты, третий масштабирующий блок 26, ограничитель 27, второй исполнительный блок 28, четвертый масштабирующий блок 29, первый блок 30 задержки, четвертый фильтр 31 низкой частоты. Регулятор работает следующим образом. Из сигнала о задании У на выходную переменную во втором блоке 5 сравнения вычитается сигнал У о выходной переменной. Полученный си|- нал поступает на вход первого фильтра 6 низкой частоты, где подавляется .высокочастотная помеха, и далее на обратную модель 7 объекта по каналу объекта без запаздывания, в частности, в виде коэффициента 1/к , на выходе которой получается сигнало корректировке первого управ ления. Этот сигнал поступает на третий вход первого сумматора 8. Из измеренного сигнала о втором управляющем воздействии с помощью четвертого фильтра 31 низкой частоты выделяется сигнал о полезной составляющей, который задерживается в первом блоке 30 задержки на интервал времени .(Со + С), пересчитывается в четвертом масштабирующем блоке 29 в масштаб первого управляющего воздействия пуЧем умножения на коэффициент, равный величине К2/,, и подается на второй вход первого сумматора 8. В первом сумматоре 8 алгебраически суммируются поступающие на его вход сигналы и в результате получается сигнал о запаздывающей оценке идеального первого управляющего воздействия u;(t-(V4))-tJ-,(t-(.)) + f-Ht)- {t| +- U it-Cr.t:)), 1 де О (t-fffl+Cp) - оценка идеального первого управляющего воздействия в момент времени (t - (t,-4 TT ) ) ; i i-Ctp+T Jl, - первое и второе 2( управляющие воздействия, реализованные в соответствующие моменты времеX- ни; v(t)-(t) - сглаженное значение разности между заданной величиной быходной переменной и фактической величиной этой переменной. Сигнал об отклонении контролируемого внешнего воздействия w(t) поступает на вход второго фильтра 1низкой частоты, где подавляются высокочастотные помехи измерения, и далее идет на вход первого масштабирующего блока 2, в котором пересчитывается в масштаб первого управ|ляющего воздействия путем умножения на коэффициент . Выходной сигнал первого масштабирующего блока 2задерживается во втором блоке 3 задержки на интервал времени ( и подается на второй вход третьего блока 9 сравнения, где вычитается из выходного сигнала первого сумматора 8. На выходе третьего блока 9 сравнения получается сигнал о приведенной оценке идеального управляющего воздействия, т.е. воздействия, из которого исключены эффекты изменеНИИ контролируемого внешнего воздействия. В результате этого выделяются эффекты неконтролируемых воздействий которые затем экстраполируются вторым экстраполятором 10 на интервал времени , где 4Т- интервал времени предстоящего такта управления. Выходной сигнал первого масштабирующего блока экстраполируется первым экстраполятором на интерва времени лГи суммируется во втором сумматоре 11 с выходным сигналом второго экстраполятора 10, На выходе второго сумматора 11 получается сигнале рассчитанном первом управляющем воздействии + ль) Для определения второго управляющего воздействия в первом блоке 23 сравнения из выходного сигнала второго сумматора 11 о требуемом первом управляющем воздействи и U(t-f/jLj вычитается выходной сигнал третьего блок 2Ц задержки о фактически реализован ном первом управляющем воздействии в момент времени (t- f-,), т.е. о той величине первого управляющего воздействия, Которая начнет действовать на объект управления в текущий i-ый момент времени. Сигнал о полученной разности поступает на вход третьего масштабирующего блока 26 и пересчитывается в масштаб второго управляющего воздействия путем умножения на коэффициент, равный величине к /К2. Выходной сигнал третьего масштабирующего блока 2б через ограничитель 27 с оперативно настраиваемой зоной ограничения подается на вход второго исполнительного блока 28, с помощью которого реализуется второе управляющее воздействие. Остальные блоки регулятора предназначены для оперативной подизстрой ки зоны ограничения ограничителя 2 .и корректировки первого управляющего воздействия. .С этой целью выходной сигнал второго сумматора 11 о требуемом управляющем воздействии задерживается в пятом блоке 15 задержки на интервал времени (То + т) 10 8 и подается на один вход четвертого блока И сравнения, где из него вычитается сигнал с выхода первого сумматора 8 об оценке идеального управляющего воздействия. В результате на выходе четвертого блока 1t сравнения получается сигнал об ошибке управляющего воздействия в момент времени t-( 4 r)j . Этот сигнал подается через блок 19 определения модуля на вход пятого фильтра 20 низкой частоты, на выходе которого получается сигнал о среднемодульной величине сигнала. Выходной сигнал пятого фильтра 20 низкой частоты умножается в пятом масштабирующем блоке 22 на постоянный коэффициент, полученный сигнал о величине зоны ограничения подается на дополнительный вход ограничителя 27. Во втором масштабиру1Э1цем блоке 18 выходной сигнал пятого фильтра 20 низкой частоты умножается на постоянный коэффициент и подается на вход блока 1б умножения, где перемножается на выходной сигнал сигнум-реле 17, величина которого равна +1 или -1 в зависимости от знака выходного сигнала четвертого блока сравнения. Если величина этого сигнала больше или равняется нулю, т.е. управляющее воздействие больше идеального, то в пятом блоке 12 сравнения из выходного сигнала второго сумматора 11 вычитается величина, п ропорциональная среднемодульномУ значению ошибки в управляющем воздействии. Если же выходная величина четвертого блока Т сравнения меньше нуля, то из выходного сигнала второго сумматора 11 вычитается соответствующий сигнал. С выхода пятого блока 12 сравнения сигнал подается на первый исполнительный блок 13, где реализуется первое управляющее воздействие. Введение новых блоков и связей позволяет минимизировать величину второго управляющего воздействия при сохранении точности регулирова- . ния.
| Т | |||
| Авторское свидетельство СССР , кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
