U(t)
со
;о
Од
О)
/ liTw
Изобретение относится к технике автоматического управления и регулирования и может быть использовано для построения систем автоматического управления техническими объектами содержащими значительные запаздьша- ния и подверженными влиянию неконтролируемых возмущений с нестационарными свойствами, причем преобразование регулирующего воздействия осуществляется в одном канале регулирования с несколькими запаздывания, т.е. зависимость между выходным сигналом Y объекта и регулирующим воздействием и в операторной форме имеет вид-Р З, Y(P)(kie + k
.,е )Ч ,(Р)-и(Р),(1
где k и k , - коэффициенты передачи для различных запаздываний объекта соответ- CTBenHOj 2 и времена запаздывания,
причем И i I (Р) - передаточная функция инерционной части объекта.
Пpи 5epoм описанного класса объектов являются каналы регулирования теплового состояния горна доменных печей снизу путем изменения расхода природного газа или мазута.
Цель изобретения - расширение функциональных возможностей устройства.
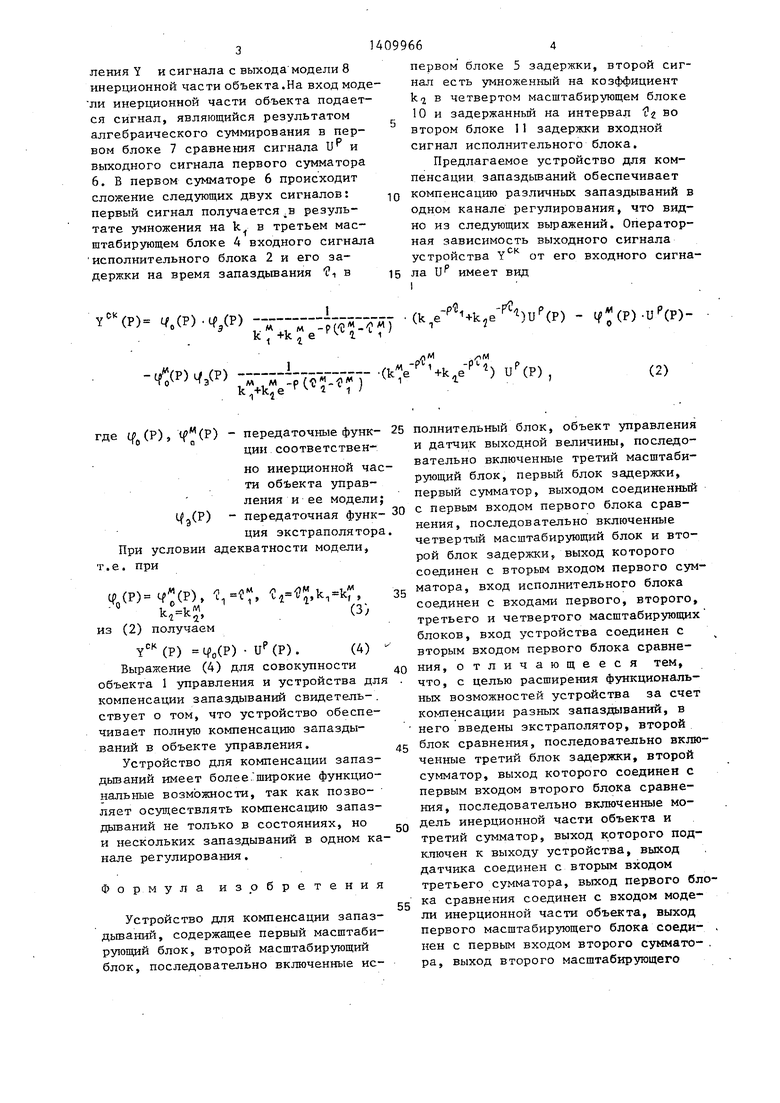
На чертеже представлена блок-схема устройства для компенсации запаз- дьшашш.
На блок-схеме приняты следующие обозначения; U(t) - сигнал регулирую™ щего воздействия в t-й момент време- HHJ Y(t) - выходной сигнал объекта управленияJ U°(t) - входной сигнал устройства для компенсации запаздыва ний| w(t) - неконтролируемое возмущение; Y (t) - выходной сигнал устройства для компенсации запаздьшаний. Устройство для компенсации запаз- дьшаний содержит объект 1 з тгравления, исполнительный блок 2, датчик 3 выходной величины, третий масштабирующий блок 4, первый блок 5 задержки, первый сумматор 6, первый блок 7 срав нения, модель 8 инерционной части объекта, третий сумматор 9, четвертый масштабирующий блок 10, второй блок 11 задержки, первый масштабиру0
5
0
5
0
5
0
5
0
5
ющий блок 12, второй сумматор 13, второй масштабирующий блок 14, третий блок 15 задержки, рторой блок 16 сравнения и экстраполятор 17.
Алгоритм функционирования устройства для компенсации запаздьюаний следующий. Регулирующее воздействие и экстраполируется в экстраполяторе 17 на меньший интервал запаздывания, корректируется в модельном контуре (составленном из первого масштабирующего блока 12, второго сумматора 13, второго масштабирующего блока 14, I третьего блока 15 задержки и второго блока 16 сравнения) с учетом разницы между большим и меньшим запаздываниями в одном канале регулирования, после чего реализуется исполнительным блоком 2 Выходной сигнал Y, ус тройства для компенсации запаздываний получается в результате суммирования измеренного датчиком 3 значения выходного сигнала Y объекта и преобразованного в модели 8 инерционной части объекта сигнала об ошибке экстраполяции регулирующего- воздействия
иР,
Для реализации описанного алгоритма функционирования устройства для компенсации запаздьшаний входной сигнал и устройства экстраполируется на время запаздьтания {, в экстра- поляторе 17 и подается на вход второго блока 16 сравнения, где алгебраически суммируется с выходным сигналом второго сумматора 13 и входным сигналом исполнительного блока 2. Во втором сумматоре 13 происходит суммирование сигналов, поступающих на его первый и второй входы. На первый вход второго суг Шатора 13 поступает выходной сигнал второго.блока 16 сравнения, умноженный в первом масштабирующем блоке 12 на коэффи- - циент k. На второй вход третьего сумматора подается выходной сигнал второго блока 16 сравнения, умноженный во втором масштабирующем блоке 14 яа коэффициент k и задержанный в третьем блоке 15 задержки на время Pj- С . Регулирующий сигнал U подается с выхода второго блока 16 сравнения через исполнительньй блок 2 на вход объекта 1 управления.
В третьем сумматоре 9 происходит суммирование сигнала об измеренном датчике 3 значении выхода объекта 1 управления Y и сигнала с выхода модели 8 инерционной части объекта.На вход моде ли инерционной части объекта подается сигнал, являющийся результатом алгебраического суммирования в первом блоке 7 сравнения сигнала U и выходного сигнала первого сумматора 6. В первом сумматоре 6 происходит сложение следующих двух сигналов: первый сигнал получается в результате умножения на k в третьем масштабирующем блоке А входного сигнала исполнительного блока 2 и его задержки на время запаздьшания
f, в
-
14099664
первом блоке 5 задержки, второй сигнал есть умноженный на козффициент k.j в четвертом масштабирующем блоке 10 и задержанный на интервал fz во втором блоке 11 задержки входной сигнал исполнительного блока.
Предлагаемое устройство для компенсации запаздьшаний обеспечивает компенсацию различных запаздываний в одном канале регулирования, что видно из следующих выражений. Оператор10
ная зависимость выходного сигнала устройства Y от его входного сигна15 ла и имеет вид
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Прогнозирующий регулятор | 1986 |
|
SU1386958A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Система автоматического регулирования | 1989 |
|
SU1640672A1 |
| Система управления участками производства | 1986 |
|
SU1399699A1 |
| Система управления | 1985 |
|
SU1285430A1 |
Изобретение может быть использовано для построения систем автоматического управления техническими объектами, содержащими значительные запаздьшания и подверженными влиянию неконтролируемых возмущений с нестационарными свойствами. Изобретение позволяет расширить функциональные возможности устройства за счет компенсации в явном виде различных запаздываний в одном канале регулирования объекта. Регулирующее воздейстр вие и экстраполируется в экстраполя- торе 17 на меньший интервал запаздывания, корректируется в модельном контуре (составленном из первого масштабирующего блока 12, сумматора 13, второго масштабирующего блока 14, третьего блока 15 задержки и второго блока 16 сравнения) с учетом разницы мезвду большим и меньшим запаздыванием в одном канале регулирования, после чего реализуется исполнительным блоком 2. Выходной сигнал уёт ройства получается в результате сум мирования измеренного датчиком 3 зна-- чения выходного сигнала Y объекта и преобразованного в модели 8 инерционной части объекта сигнала об оптбке экстраполяции регулирующего воздействия (Л и 1 ил.
) /,(Р).) --«--- -:;7.-й:Тм) () - tf D-uPCP)IrJ.l« r rt
k7H-k e- 4-S
-(P,,(P)I,,),
(2)
где qj (), if (P) - передаточные функ- 25
ции соответствен но инерционной части объекта управления и ее модели; Ifg(P) - передаточная функ- 30
ция экстраполятора. При условии адекватности модели, т.е. при
q ,,(P)f(P). ,k,,
k,k,(3)
из (2) получаем
Y (P) Ч о(Р) - ). (А) Выражение (4) для совокупности объекта 1 управления и устройства дл компенсации запаздываний свидетель-, ствует о том, что устройство обеспечивает полную компенсацию запаздываний в объекте управления.
Устройство для компенсации запаз- дьшаний имеет более. щирокие функциональные возможности, так как позволяет осуществлять компенсацию запаздываний не только в состояниях, но и нескольких запаздываний в одном канале регулирования.
Формула изобретения
Устройство для компенсации запаздьшаний, содержащее первый масштабирующий блок, второй масштабирующий блок, последовательно включенные ис(2)
25
0
5
0
5
0
5
полнительный блок, объект управления и датчик выходной величины, последовательно включенные третий масштабирующий блок, первый блок задержки, первый сумматор, выходом соединенный с первым входом первого блока сравнения, последовательно включенные четвертый масштабирующий блок и второй блок задержки, выход которого соединен с вторым входом первого сумматора, вход исполнительного блока соединен с входами первого, второго, третьего и четвертого масщтабирующих блоков, вход устройства соединен с вторым входом первого блока сравнения, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет компенсации разных запаздываний, в него введены зкстраполятор, второй блок сравнения, последовательно включенные третий блок задержки, второй сумматор, выход которого соединен с первым входом второго блока сравнения, последовательно включеннь1е модель инерционной части объекта и третий сумматор, выход которого под- кттючен к выходу устройства, выход датчика соединен с вторым входом третьего сумматора, выход первого блока сравнения соединен с входом модели инерционной части объекта, выход первого масштабирующего блока соеди- . нен с первым входом второго суммато- . ра, выход второго масш табиругащего
блока подключен к входу третьего бло- го блока сравнения, выход которого
ка задержки, вход устройства соединенсоединен с вторым входом второго блос входом экстрап.олятора, выход кото-ка сравнения и с входом исполнительрого соединен с первым входом второ-ного блока.
| Устройство для компенсации запаздываний | 1980 |
|
SU962839A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
