(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| Устройство управления впрыском топлива в дизель-генератор | 1983 |
|
SU1116204A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для позиционного управленияМАНипуляциОННыМ РОбОТОМ | 1979 |
|
SU838664A1 |
| Устройство управления впрыском топлива | 1980 |
|
SU877105A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Устройство управления впрыском топлива в дизель-генератор | 1980 |
|
SU885588A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| Устройство для управления манипулятором | 1981 |
|
SU991367A1 |
1
Изобретение относится к области робототехники и может быть испопьзовано при создании манипуляторов с позиционным и скоростным режимами управления.
Известно устройство управления манипулятором, содержащее замкнутый по положению привод, блок задания программы, сумматор и ;исполнительный механизм 1.
Недостаток данного устройства состоит в том, что оно не обеспечивает управление скоростного движения привода.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее последовательно соединенные блок задания программы, сумматор, привод и датчик положения, выход которого подключен ко входу блока задания программы и второму входу сумматора 23.
Однако известное устройство не обеспечивает скоростное управление.приводом манипулятора.
Цель изобретения - раапарение функциональных возможностей устройства за
счет обеспечения позииионно-скоростного режима работы устройства.
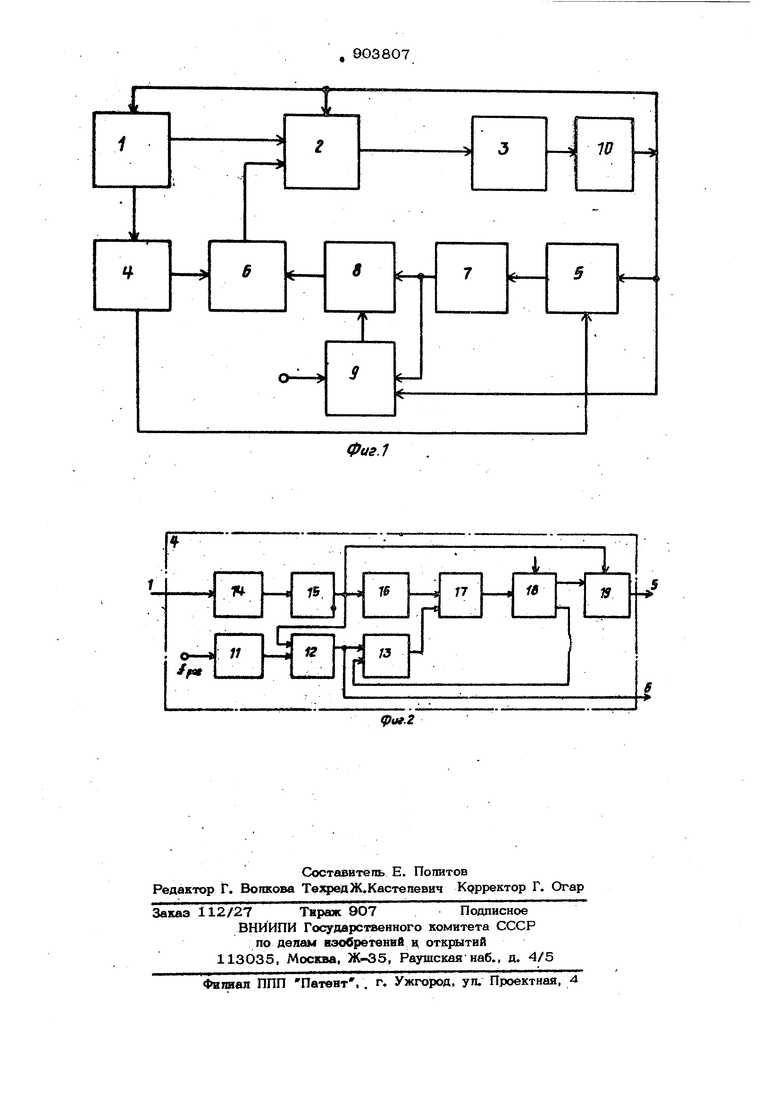
Поставленная цель достигается тем, что устройство содержит блок управления ключами, блок задания коэффициента усиления и последовательно соединенные пер)вый ключ, элемент памяти, регулируемый усилитель и второй ключ, выход которого подключен к третьему входу сумматора, а второй вход - к первому выходу блока управления ключами, входом соединенного ро вторым выходом блока задания программы, а вторым выходом - с первым входом первого ключа, второй вход которого подключен к выходу датчика положения и первому входу блока задания коэффициента усиления, вторым входом соединенного с выходом элемента памяти, а выходом - со вторым входом регулируемого усилителя, а также в том, что блок управления ключами содержит последовательно соединенные перестраиваемый генератор импульсов, первый и второй элементы И, а также последовательно соединенные первый одновибратор, первы триггер, второй одновибратор, элемент ИЛИ, второй триггер и третий эпемент И, второй вход которого подключен к вы ходу первого триггера и второму входу первого элемента И, выход к первому выходу блока управления ключами, второй выход и вход которого соединены соответственно с выходом первого эпеме та И и входом первого одновибратора, второй выход второго триггера подключе ко второму входу второго элемента И, выходом соединенного со вторым входом элемента ИЛИ. На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока уп равления ключами. Устройство содержит блок 1 задания программы, сумматор 2, привод3, блок 4управления ключами, первый ключ 5, второй. ключ 6, элемент 7 памяти, регулируемый усилитеггь 8, блок 9 задания коэффициента усиления, датчик 10 положения, перестраиваемый генератор 11 импульсов, первый элемент И 12, второй элемент И 13, первый одновибратор 14, первый триггер 15, второй одновиб- ратор 16, элемент ИЛИ 17, второй триг гер 18, третий элемент И 19. Устройство работает следующим образом. Устройство работает в двух режимах: позиционном и скоростном. Выбор режи ма работы производится в блоке 1, в качестве которого может быть использована ЦВМ. Блок 1 формирует сигнал переключения на своем управляющем выходе, подключенном ко входу блока 4 уп равления ключами, который осуществля ет необходиглые в устройстве переключения. В первом режиме (при позиционном управлении) блок 4 управления ключами закрывает ключи 5 и 6. При этом инфор мационный выход блока 1 через сумма™ тор 2 подключен ко входу привода 3, вы ход которого через датчик 10 положения соединен со входом блока 1. Во втором режиме (при управлении скоростью) блок 4 управления ключами открывает по сигналу бло1са 1 ключи 5и 6, причем с блока 4 подаются на управляющий вход ключа 5 открывающие импульсы с частотой f., При этом инфрр мационный выход блока 1 также подклю« пен к первому входу сумматора 2, выход которого подключен ко входу Привода 3, выход привода 3 через датчик 10 положения соединен одновременно со вхо, дами блока 1, ключа 5 и блока 9 задаifflH .коэффициента усиления, а выход ключа 5 через элемент 7 памяти - со входами усилителя 8 и блока 9 задания коэффициента усиления, выход усилителя 8 через ключ 6 подключен к третьему входу сумматора 2. В первом режиме блок 1 формирует и подает на сумматор 2 требуемое значение угла поворота у. выходного вала двигателя привода 3, а на вход блока 4 одновременно вырабатывает сигнал, по которому он запирает кшочи 5 и 6. Так как третий вход сумматора 2 отключен, он выполняет функцию масштабного усилителя с коэффициентом передачи . и, не изменяя фазы и fg подает его на БХ.ОД привода 3, который отрабатывает заданную ему уставку. При этом информация о текущем положении привода 3 с его выхода через датчик 10 положения, установленный на ъапу исполнительного двигателя, например потенциометрический или цифровой датчик Чвых- - дается на вход блока 1 и используется им для контроля оТработки приводом 3 уставки. Во втором (скоростном) режиме блок 1 подает на вход сумматора 2 управляющий сигнал tUgj( а на вход блока 4 сигнал, дешифрируя который, блок 4 управляет отпиранием ключа 5 короткими импульсами с частотой -f , с задержкой, необходимой для установки элемента 7 памяти и коэ ;|фнцнента усипения усипите.пя 8, поспе прохождения первого импульса на ключ 5 блок 4 отпирает на время всей работы кпюч 6. Причем частота f выбирается пропорционапьно частоте среза привода 3 (в диапааоне 10-1ООГц). Текущее значение выходной координаты f BL поступает в элемент 7 памяти и хранится там до прихода следующего импульса на вход ключа 5. Таким образом, на выходе эпемента 7 памяти, который может бытЬ) выполнен как экстраполятор пулевого порядка, имеется информация о положении привода 3 в дискретные моменты времени1д « С и 0,1 ,,,t.... величина усиливается в усилителе 8 и через ключ 6 подается на третий вход сумматора 2. Причем коэффициент усиления усилителя 8 выставляется блоком 9 задания коэффициента усиления, а величина его К. определяете текущими значениями Vgy , .и постоянными составляющими, задаваемыми до начала рабо ты устройства оператором на блоке 9, Обратная связь по попожению, вводимая в блок 1 с выхода датчика 10, как . в первом режиме может быть испопьэована дпя контроля выполнения заданной тра ектории движения. Кроме того, эта инфор мация необходима в блоке 1 для определения управляющих ЙАЬ Сё ригналов при переключении режимов рабо ты устройства, которое осуществляется блоком 4. Блок 4 работает следующим образом. При включении питания триггеры 15 и 18 устанавливаются в исходное состояние,и на выходах блока 4 устанавливается логический ноль, так как элементы И 12 и 19 заперты сигналом с тригirepa 15, по которому ключи 5 и 6 не могут быть включены (т.е. коммутирующая цепь разомкнута). На входе блока 4 всегда вначале стоит логический ноль, являющийся признаком позиционного управления. При появлении на входе блока 4 логической единицы, которая соответст вует скоростному режиму управления, оДно вибратор 14 вырабатывает импульс, кото рый перебрасывает триггер 15 в единично состояние, в результате чего элемент И 1 открывается и пропускает на один из выход импульсы с генератора 11. По заднему фронту первого импульса, прошедшего на выход элемента И 12, триггер 18 перебрасывается в единичное состояние, и на втором выходе блока 4 появляется сигнал, который открывает ключ 6, одновременно триггер 18 запирает элемент И 13 и прекращает подачу импульсов на вход триггера 18. После снятия со входа блока 4 логической единицы одновиб- ратора 14 переключает триггер 15,- который запирает выходы блока 4, Одновременно по перепаду состояний второй. одновибратор 16 вырабатывает импульс, который перебросит триггер 18 в исходное состояние. Таким образом, применение изобретения позволяет осуществлять позиционно- скоростной режим управления манипулято ром. Формула изобретения 1. Устройство для управления мани-р пулятором, содержашее последовательно соединенные блок задания программы, сумматор, привод и датчик положения, выходом подключенный ко входу блока задания программы и второму входу сумматора, отличающееся тем, что, с целью расщирения функциональных возможностей устройства за счет обеспечения позиционно-скоростного режима работы устройства, оно содержит блок управления ключами, блок задания коэффициента усиления и последовательно соединенные первый ключ, элемент памяти, регулируемый усилитель и второй ключ, выход которого подключен к третье- ме входу сумматора, а второй вход - к fiepBOMy выходу блока управления ключами, входом соединенного со вторым вхо- дом блока задания программы, а вторым выходом - с первым входом первого ключа, второй вход которого подключен к выходу датчика положения и первому входу блока задания коэффициента усиления, вторым входом соединенного с выходом элемента памяти, с выходом - со вторым входом регулируемого усилителя. . .2. Устройство по п. 1, отличающее с я тем, что, блок управления ключами содержит последовательно соединенные перестраиваемый генератор импульсов, первый и второй элементы И, а также последовательно соединенные первый одновибратор, первый триггер, второй одновибратор, элемент ИЛИ, второй триггер и третий элемент И, второй вход которого подключен к выходу первого триггера и второму входу первого элемента И, а выход к первому выходу блока управления ключами, второй выход и вход которого соединен соответственно с выходом первого элемента И и входом первого одновибратора, второй выход второго триггера подключен ко второму входу второго элемента И, выходом соединенного со вторым входом элемента ИЛИ. Источники информации, принятые во внимание при экспертизе 1.Андреенко С. Н. и др. ПроектироЕание приводов манипуляторов, Л.,Машиностроение, 1975, с. 65-78. 2. Пол Р. Моделирование, планирование траекторий и управление движением робота-манипулятора. М,, Наука, 1976, с. 60 (прототип).
о-« /
Фиг.1
