Изобретение относится к роботостроению и может быть использовано при проектировании и эксплуатации промьшиденных роботов и манипуляторов .
Известно устройство для позиционного управления манипуляционным роботом, содержащее блок задания программы, сумматор, усилитель, двигатель, датчик обратной связи по положению, блок выделения модуля, компаратор, механизм торможения, причем вход блока задания программы через сумматор, усилитель и двигатель связи с исполнительным органом а двигатель через датчик обратной связи по положению связан со вторым вводом сумматора и со входом блока задания nporpaMivM, вход сумматора через блок выделения модуля соединен с компаратором, а механизм торможения связан с исполнительным органом l.
Однако известное устройство не обладает достаточной степенью надежности, так как при появлении импульсной помехи возможно неттредсказуемое срабатывание механизма торможения, в результате чего возможно возникновение аварийной ситуации .
Цель изобретения - повышение надеж«ости устройства для позиционного управления манипуляционным роботом.
Это достигается благодаря тому, что устройство для позиционного управления манипуляционным роботом снабжено блоком защиты от помех,со0держащим два дополнительных компаратора, четыре элемента И, два блока памяти, элемент задержки, элемент ИЛИ, два элемента НЕ, дифференциатор переднего фронта импульса и диффе5ренциатор заднего фронта импульса, причем один из входов первого элемента И св.язан с выходом компаратора, а второй его вход связан с выходом блока задания программы, вы0ход первого элемента И соединен с одним из входов второго элемента И, выход которого связан с первым входом первого блока памяти, выход которого через третий элемент И связан
5 со вторым входом первого блока памяти, выход второго элемента И через первый элемент НЕ связан со вторым входом третьего элемента И, выход первого блока памяти связан также
0 с механизмом торможения и с одним
из входов четвертого элемента И, второй вход icoTOporo связан с выходом блока выделения модуля, а выход через дифференциатор заднего фронта импульса 1- первый дополнительный компаратор - с первым входом второгоблока памяти, кроме того, этот .же выход через дифференциатор переднего фронта импульса, второй дополнительный компаратор и элемент ИЛИ связан со вторым входом второго блока памяти , выход которого через элемент задерхски на включение связан со вторым входом элемента ИЛИ, при этом выход второго блока памяти через второй элемент НЕ связан со вторым входом второго элемента И и с третьим входом третьего элемента И
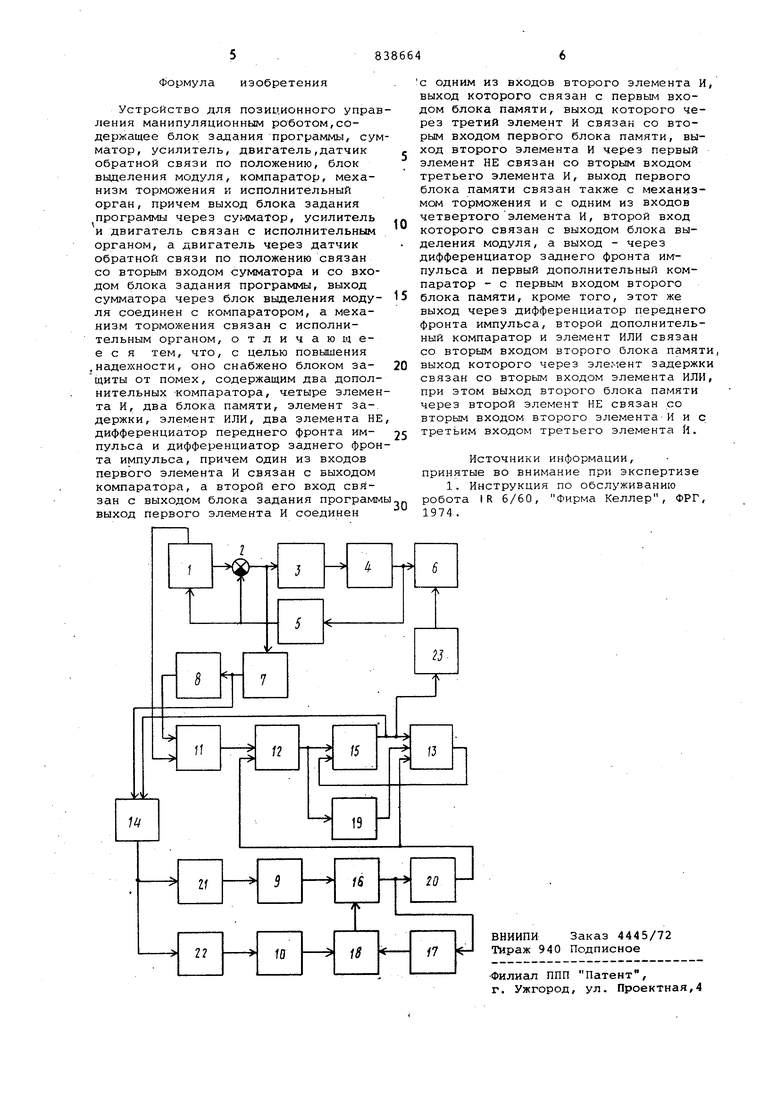
На чертеже изображена схема устройства для позиционного управления манипуляционным роботом.
Устройство для позиционного управления манипуляционным роботом содержит блок 1 задания программы, позиционный сервопривод (на чертеже не показан) с пропорциональным управлением, в который входит сумматор 2, усилитель 3, двигатель 4, датчик 5 обратной связи по положению исполнительный орган 6. Канал дискретного управления содержит блов: 7 выделения модуля, компаратор 8, г;ервый и второй дополнительные ком.параторы 9 и 10 с регулируемым порогом чувствительности, первый 11, BTopoii 12, третий 13 и четвертый 14 элементы И, первый 45 и второй 16 блоки памяти, элемент 17 задержки сигнала, элемент 18 ИЛИ, первый 19 и второй 20 элементы НЕ, дифференциторы 21 и 22 заднего и переднего фронтов импульса соответственно и механизм 23 торможения.
Из блока 1 задания программы через сумматора 2, усилитель 3 на двигатель 4 привода каждой степени подвижности поступает сигнал. При подаче заданного сигнала в сервопривод сигнал с выхода сумматора 2 поступает через блок 7 вьщеления модуля и компаратор 8 с регулируемы порогом чувствительности на первый вход первой схемы элемента 11 И, а на второй вход этого же элемента поступает импульс с блока 1 задания программы о том, что пришедший сигн в канал дискретного управления есть Зсщанный сигнал, а не помеха. В случае., если помехи до прихода осноного сигнала не было, через второй элемент 12 И происходит запись в первом блоке 15 памяти информации о том, что начался процесс отработки заданного сигнала, при этом срабатывает механизм 23 торможения, рг стормаживая механизм перемещения отдельной степени подвижности. По окончании отработки, когда с первог компаратора 8 поступает пулевой сигнал, на выходе первого элемента 19 . возникает единичный сигнал - процес.: отработки заданного сигнала закончился, а с выхода первого блока 15 памяти поступает сигнал о том, что до последнего момента шел процесс отработки заданного сигнала, в резултате чего на выходе третьего элемента 13 И появляется сигнал о том, что процесс отработки был и что он закончился. После этого осуществляется сброс информации в первом блоке 15 памяти, выдается команда в
механизм 23 торможения.
В случае появления импульсной помехи начала отработки заданного си1нала характер его отработки сервоприводом не изменится до момента, пока ошибка рассогласования не приблизится к нулю. В момент прихода импульсной помехи срабатывает дифференциатор 21 заднего фронта импульса, в силу чего сигнал через первый дополнительный компаратор 9, настроенный на требуемую величину чувствительности помехи, запишет во второй блок 16 памяти информацию о том, что прошла помеха, при этом сброса информации в первом блоке 15 памяти не будет, поскольку с выхода второго блока 16 памяти через второй элемент 20 flE поступает сигнал запрещения сброса, и первого блока 15 памяти (через третий элемент 13 И). По окончании прохождения импульса помехи через дифференциатор 22 переднего фронта импульса, через второй дополнительный компаратор 10 и элемент 18 ИЛИ происходит стирание информации во втором блоке 16 памяти, снимается запрет на сброс информации в первом блоке 15 памяти и происходит стирание информации в первом блоке 15 . В дальнейшем произойдет отработка заданного сигнала по выпгеописанному алгоритму.
Такое же снятие запрета на сброс информации в первом блоке 15 памяти появляется и в случае, когда начало помехи появляется до окончания основного процесса и это появление фиксируется дифференциатором 21 заднего фронта импульса 21 и блоком 16 памяти, а конец помехи появляется по окончании отработки заданного сигнала. В этом случае сброс информации во втором блоке 16 памяти осуществляется либо по окончании помехи (через дифференциатор 22 переднего фронта импульса, третий компаратор 10 и элемент 18 ИЛИ), либо до окончания помехи, если по каким-либо причинам переднего импульса не появилось, через элемент 17 задержки величина которой практически не сказывается на погрешность позиционирования. Формула изобретения Устройство для позиционного упра ления манипуляционным роботом,содержащее блок задания программы, су матор, усилитель, двигатель,датчик обратной связи по положению, блок вьщеления модуля, компаратор, механизм торможения и исполнительный орган, причем выход блока задания программы через сугиматор, усилитель и двигатель связан с исполнительным органом, а двигатель через датчик обратной связи по положению связан со вторым входом сумматора и со вхо дом блока задания программы, выход сумматора через блок выделения моду ля соединен с компаратором, а механизм торможения связан с исполнительным органом, отличающееся тем, что, с целью повышения .надежности, оно снабжено блоком от помех, содержащим два допол нительных -компаратора, четыре элеме та И, два блока памяти, элемент задержки, элемент ИЛИ, два элемента Н дифференциатор переднего фронта импульса и дифференциатор заднего фро та импульса, причем один из входов первого элемента И связан с выходом компаратора, а второй его вход связан с выходом блока задания программ выход первого элемента И соединен с одним из входов второго элемента И, выход которого связан с первым входом блока памяти, выход которого через третий элемент И связан со вторым входом первого блока памяти, выход второго элемента И через первый элемент НЕ связан со вторым входом третьего элемента и, выход первого блока памяти связан также с механизмом торможения и с одним из входов четвертого элемента И, второй вход которого связан с выходом блока выделения модуля, а выход - через дифференциатор заднего фронта импульса и первый дополнительный компаратор - с первым входом второго блока памяти, кроме того, этот же выход через дифференциатор переднего фронта импульса, второй дополнительный компаратор и элемент ИЛИ связан со вторым входом второго блока памяти, выход которого через элемент задержки связан со вторым входом элемента ИЛИ, при этом выход второго блока памяти через второй элемент НЕ связан со вторым входом второго элемента И и с третьим входом третьего элемента И. Источники информации, принятые во внимание при экспертизе 1. Инструкция по обслуживанию робота IR 6/60, Фирма Келлер, ФРГ, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1980 |
|
SU903807A1 |
| Устройство для управления электроприводом робота | 1982 |
|
SU1092462A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления манипулятором | 1981 |
|
SU991367A1 |
| Регулятор | 1980 |
|
SU926615A2 |
| Устройство для управления промышленным роботом | 1985 |
|
SU1271739A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для опроса датчиков | 1984 |
|
SU1238089A2 |
| Цифровая система управления | 1984 |
|
SU1229724A1 |
| Следящая система | 1986 |
|
SU1376061A1 |
