1
Изобретение относится к электротехнике, в частности к электроприводам, и может быть использовано для управления шаговым двигателем в системах автоматического регулирования„
Известно устройство для управления шаговым двигателем со стабилизацией скорости в режиме бесконтактной машины постоянного тока, содержащее двигатель с датчиком положения ротора, имеющим циклическую характеристику вход-выход ; линейную в пределах цикла, соединенный с усилителями мощности через функциональный преобразователь, включающий в себя преобразователь линейно изменяющегося сигнала в ступенчатый и в сигналы, близкие к синусоидальнымСи.
Недостатком данного устройства является его сложность, выражаклцаяся в необходимости функциональных преобразований линейных сигналов дат-чика.
Наиболее близкое по технической сущности к предлагаемому устройство для управления шаговым двигателем, содержащее датчик положения ротора с линейной в пределах цикла характеристикой вход-выход, синхронизированный генератор пилообразного напряжения, элемент сравнения, связанный вxoдa ш с выходами датчика положения и синхронизированного геиератора, и усшштели мощности, соединенные входами е выходами эле-, ментов И 21.
Недостатком указанного устройства является низкая равномерность движения, обусловленная колебаниями a mлитyды момента на шаговом интервале, а также сложность устройства.
Цель изобретения - повышение равномерности движения диигателя и упрощения устройства.
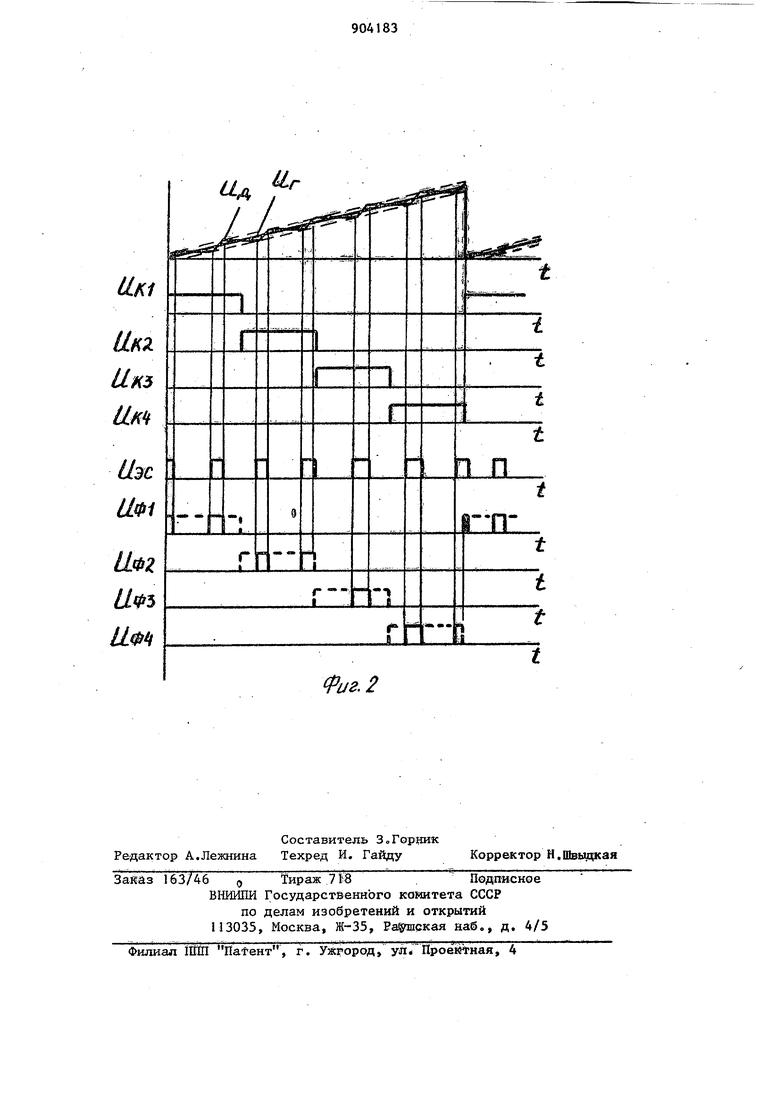
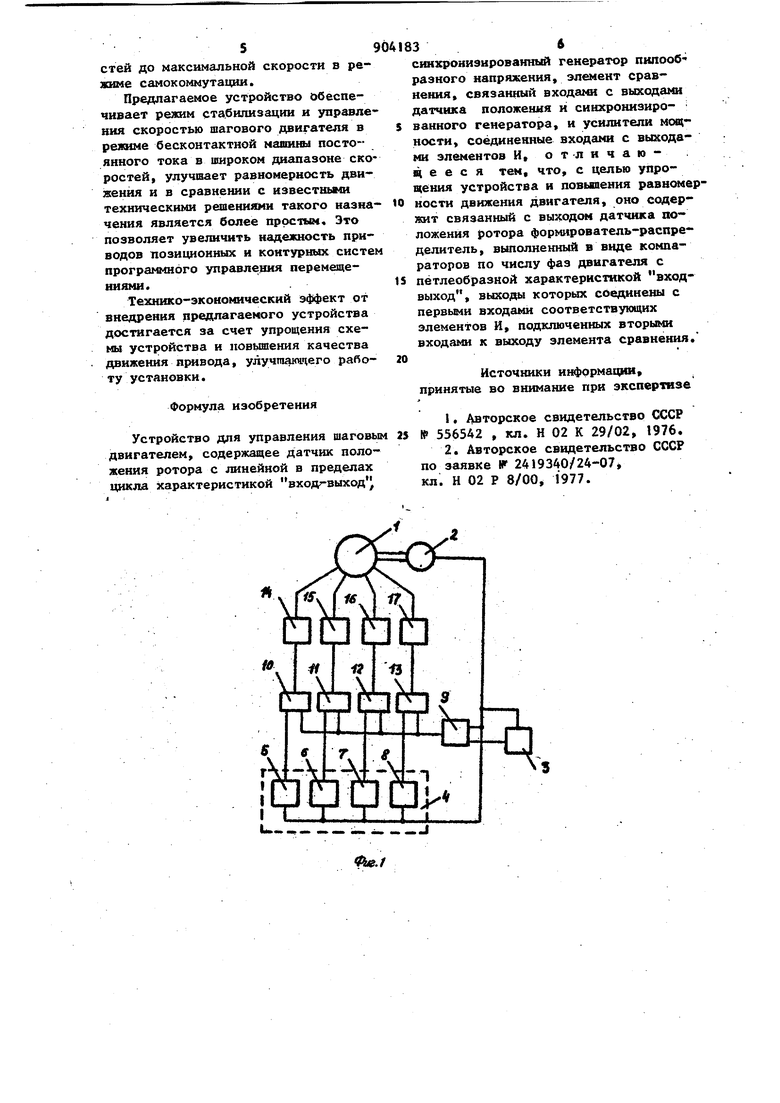
Поставленная цель достигается тем, что устройство для управления шаговым двигателем содержит связан39ный с выходом датчика положения ро тора формирователь-распределитель, выполненный в виде компараторов по числу фаз двигателя с петлеобразной характеристикой вход-выход, выходы которых соединены с первыми входами соответствующих элементов И, подключенных вторыми входами к выходу элемента сравнения Такое выполнение устройства повышает равномерность движения и упро щает схему устройства. На фиг, 1 приведена функциональная схема предлагаемого устройства применительно к четырехфазному шагоBc iy двмгателк, на фиг. 2 - временны диаграммы сигналов на отдельных элементах устройства. Устройство (фиг. t) содержит шаго вый двигатель 1, на валу которого укреплен датчик 2 положения ротора с циклической характеристикой входвыход , линейной в пределах цикла, связанный выходом со входами синхро-визируемого генератора 3 пилообразного напряжения и формирователя-распределителя 4, выполненного в виде компараторов 5-8 по числу фаз двигателя с петлеобразной характеристикой вход-выход и с первым входом элем та 9 сравнения. Выходы компарбаторов 5-8 соединены с первыми входами эле ментов И 10-13, вторые входы которы соединены с выходом элемента 9 срав нения; Фазы шагового двигателя 1 через усилители 14-17 мощности связаны с выходами элементов И 10-13. Работа предлагаемого устройства поясняется временными диаграммами сигналов на отдельных элементах (фиг. 2) где показаны линейно-изме няющиеся в функции положения ротора напряжение и на выходе датчика- 2 положения, напряжение Up на выходе генератора 3 пилообразного напряжения, напряжения Up,, выходах ком параторов соответственно 5-8, напряжение U9c,Ha выходе элемента 9 сравнения, напряжения входах усилителей мощности 14-17. Устройство работает следующим образ 5м. Шаговый двигатель 1 с датчиком 2 положения на валу соединенный с выходами усилителей 14-17 мощности, работает в режиме бесконтактной машины постоянного тока. Коммутация фаз обеспечивается подачей с выходов компараторов 5-8 сигналов на первые 3 рходы группы логических элементов И 10-13. В моменты, соответствующие началу циклической характеристики датчика 2 положения ротора (фиг. 2), запускается генератор 3 пилообразного напряжения с регулируемой крутизной линейно изменяющегося напряжения. Сигналы генератора поступают на первый вход элемента 9 сравнения, на второй лход которого подаются сигналы датчика .положения. С изменением крутизны пилообразного сигнала генератора, когда его амплитуда превьшлет амшштуду сигнала датчика, выходной сигнал сравнивающего устройства IJjc принимает высокий уровень, в результате чего контур обратной связи по положений оказывается замкнутым, двигатель разгоняется. В процессе разгона двигателя возрастает крутизна выходного сигнала датчика и при достижении им уровня сигнала с генератора сравнивающее устройство переходит в противоположное состояние. Контур связи по положению размыкается и двигатель тормозится под действием момента нагрузки до определенного срабатывания сравнивающего устройства. Время нахождения двигателя во включенном состоянии в пределах такта коммутации изменяется с изменением крутизны сигнала генератора. При увеличении крутизны сигнала генератора время включенного состояния двигателя увеличивается. Процесс переключения осуществляется с большой частотой, поэтому питание фаз двигателя осуществляется импульсами с коэффициентом заполнения коммутационного интервала, меньшим единицы. Среднее значение тока в фазах двигателя устанавливается пропорциональным коэффициенту заполнения. При скоростях нарастаний сигнала генератора пилообразного напряжения, меньших скорости механических переходных процессов шагового двигателя, осуществляется процесс непрерывного слежения сигнала датчика за сигналом с выхода генератора и, следовательно, скорость двигателя будет отслеживать скорость изменения сигнала генератора. Изменением крутизны импульсов генератора обеспечивается регулирование скорости двигателя в широком диапазоне от весьма низких скоростей до максимальной скорости в режиме самокоммутацки. Предлагаемое устройство обеспечивает режим стабилизации и управления скоростью шагового двигателя в реяЕИме бесконтактной машиш 1 постоникого тока в широком диапазоне скоростей, улучшает равномерность движения и в сравнении с известными техническими решени 1и такого назначения является более простым. Это позволяет увеличить надежность приводов позиционных и контурных систем nporpai«ffl6ro управления перемещениями. Технико-экономический эффект от внедрения предлагаемого устройства достигается за счет упрощения схемы устройства и повышения качества движения привода, улучтаакчдего pafioту установки. Формула изобретения Устройство дпя управления шаговы двигателем, содержащее датчик положения ротора с линейной в пределах цикла характеристикой вход выход 9 3 ж синхронизированный генератор пипоооразного напряжения, элемент сравнения, связанный входами с выходами датчика положения и синхронизированного генератора, и усилители мощности, соединенные входами с выходами элементов И, отличающееся тем, что, с целью упрощения устройства и повышения равномерности движения двигателя, оно содержит связанный с выходом датчика положения ротора формирователь-распределитель, выполненный в виде компараторов по числу фаз двигателя с петлеобразной характеристикой входвыход, выходы которых соединены с первьми входами соответствующих элементов И, подключенных вторыми входами к выходу элемента сравнения. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 556542 , кл. Н 02 К 29/02, 1976. 2.Авторское свидетельство СССР по заявке V 2419340/24-07 кл. Н 02 Р 8/00, 1977.
г J
иг. 2
t t
Г
1 1
зл
р-П
11 I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1976 |
|
SU738092A1 |
| Синхронизированный вентильный электродвигатель | 1981 |
|
SU991571A1 |
| Устройство для управления двумя шаговыми двигателями | 1977 |
|
SU743153A1 |
| Устройство для управления шаговым двигателем в режиме самокоммутации | 1983 |
|
SU1167689A1 |
| Синхронизированный бесконтактный электропривод постоянного тока | 1977 |
|
SU731521A1 |
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Многоканальный усилитель мощности для управления шаговым двигателем | 1978 |
|
SU782116A2 |
| Следящая система | 1985 |
|
SU1290251A1 |
| Шаговый электропривод | 1986 |
|
SU1372585A1 |