(54) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА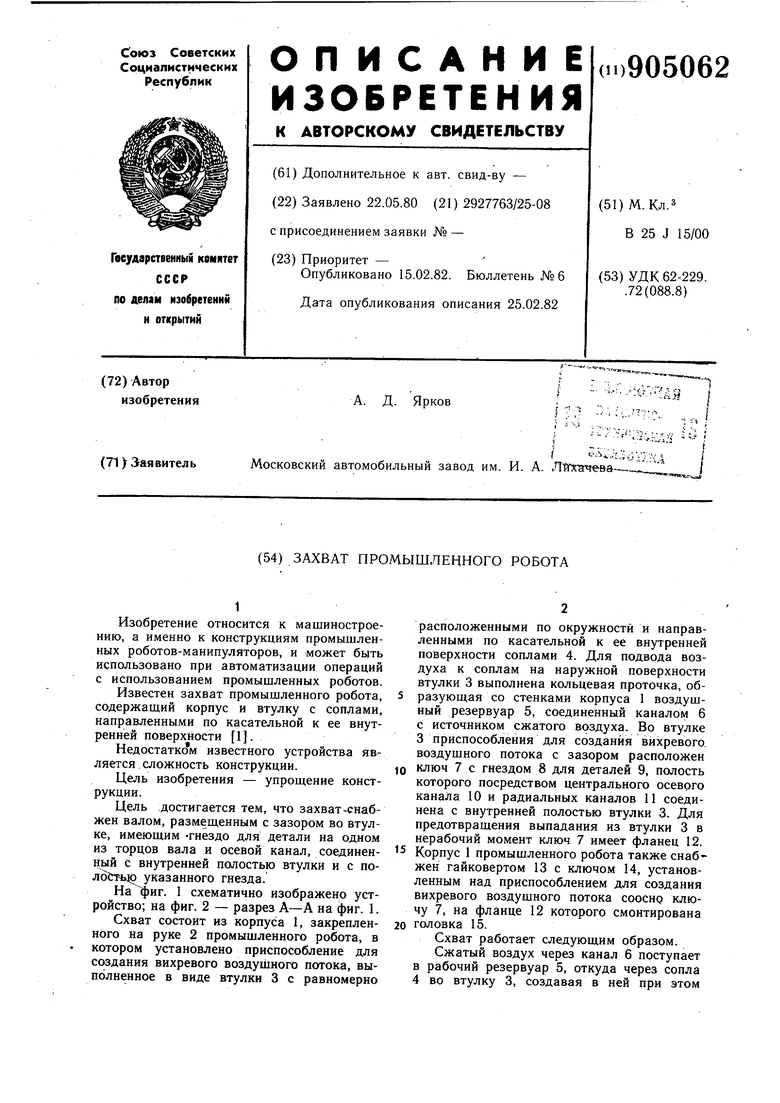
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотный стол для автоматической сборки деталей | 1979 |
|
SU772789A1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2179504C1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2002 |
|
RU2202466C1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Устройство для автоматической сборки деталей типа вал-втулка | 1978 |
|
SU700320A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2001 |
|
RU2199432C2 |
| Пневматический схват | 1988 |
|
SU1620300A1 |
| Схват | 1986 |
|
SU1388281A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| СТРУЙНОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 2001 |
|
RU2199428C2 |
1
Изобретение относится к машиностроению, а именно к конструкциям промышленных роботов-манипуляторов, и может быть использовано при автоматизации операций с использованием промышленных роботов.
Известен захват промышленного робота, содержащий корпус и втулку с соплами, направленными по касательной к ее внутренней поверхности 1.
НедостатксУм известного устройства является. сложность конструкции.
Цель изобретения - упрошение конструкции.
Цель достигается тем, что захват-снабжен валом, размещенным с зазором во втулке, имеющим -гнездо для детали на одном из торцов вала и осевой канал, соединенный с внутренней полостью втулки и с полбСтью указанного гнезда.
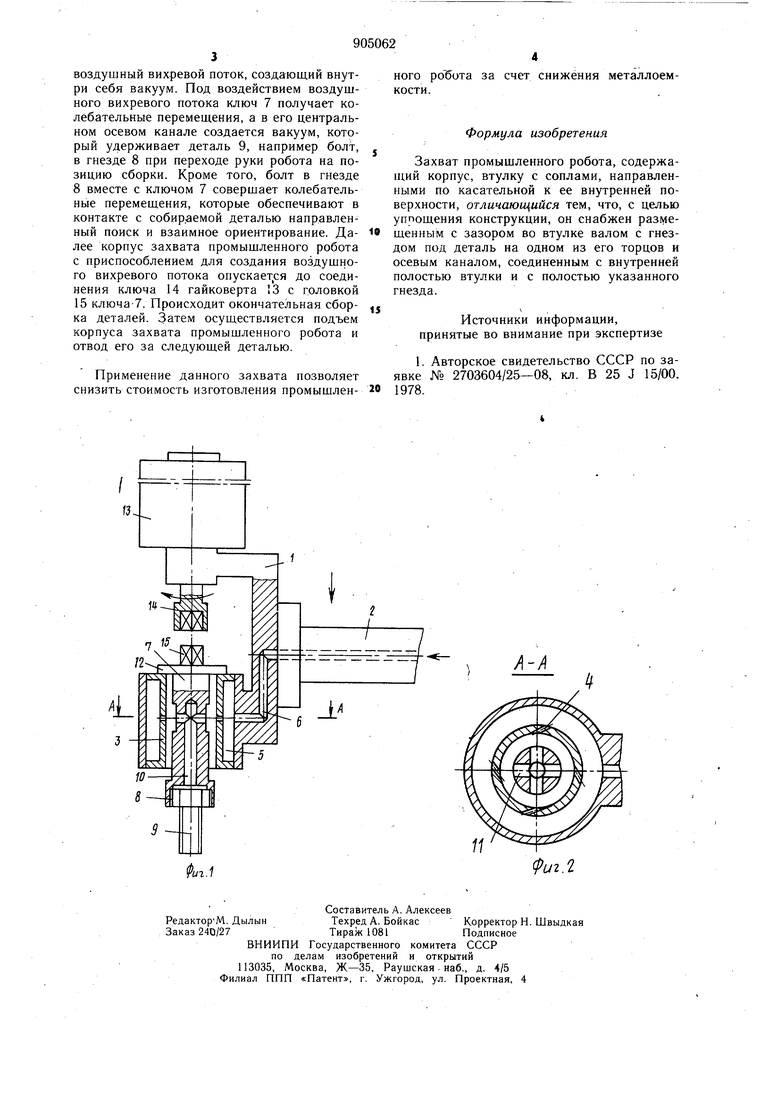
На фиг. 1 схематично изображено устройство; на фиг. 2 - разрез А-А на фиг. 1.
Схват состоит из корпуса 1, закрепленного на руке 2 промышленного робота, в котором установлено приспособление для создания вихревого воздушного потока, выполненное в виде втулки 3 с равномерно
расположенными по окружности и направленными по касательной к ее внутренней поверхности соплами 4. Для подвода воздуха к соплам на наружной поверхности втулки 3 выполнена кольцевая проточка, образующая со стенками корпуса 1 воздушный резервуар 5, соединенный каналом 6 с источником сжатого воздуха. Во втулке
3приспособления для создания вихревого, воздушного потока с зазором расположен
10 ключ 7 с гнездом 8 для деталей 9, полость которого посредством центрального осевого канала 10 и радиальных каналов 11 соединена с внутренней полостью втулки 3. Для предотвращения выпадания из втулки 3 в нерабочий момент ключ 7 имеет фланец 12.
5 Корпус 1 промышленного робота также снабжен гайковертом 13 с ключом 14, установленным над приспособлением для создания вихревого воздушного потока COOCHQ ключу 7, на фланце 12 которого смонтирована
20 головка 15.
Схват работает следующим образом. Сжатый воздух через канал 6 поступает в рабочий резервуар 5, откуда через сопла
4во втулку 3, создавая в ней при этом
