Фиг. 10
Изобретение относится к машиностроению и может быть использовано в качестве захватного органа робота-манипулятора,
Цель изобретения - повышение грузоподъемности охвата.
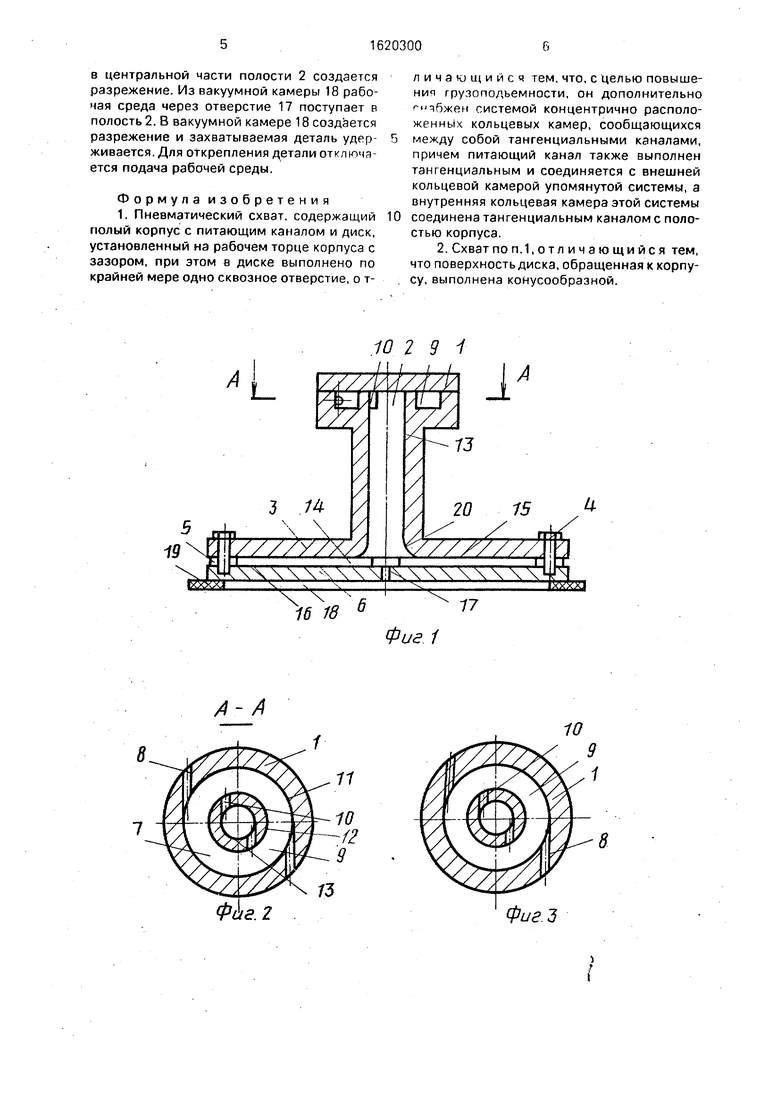
На фиг,1 изображено устройство, продольный разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - вариант выполнения устройства с несколькими тангенциальными каналами; на фиг.4 - вариант выполнения полости корпуса, поперечный разрез; на фиг.5 - то же, продольный разрез; на фиг.6 - вариант выполнения устройства для удержания и завинчивания детали типа шпильки; на фиг.7 - вариант выполнения устройства для удержания детали типа болта; на фиг.8 - вариант выполнения устройства для удержания детали шарообразной формы; на фиг.9 - устройство с конусообразной формой диска; на фиг.10 - возможность установки дополнительных кольцевых камер; на фиг.11 - вариант выполнения устройства с центральным подводящим каналом; на фиг.12 - разрез Б-Б на фиг. 11; на фиг.13,14- варианты выполнения тангенциальных каналов; на фиг.15 - вариант выполнения устройства для удержания мешкотары; на фиг.16 - вариант выполнения устройства для захвата горячих или охлажденных деталей.
Устройство содержит корпус 1 с полостью 2 и фланцем 3. На корпусе 1 посредством болтов 4 и прокладок 5 закреплен диск 6. Система 7 концентрично расположенных кольцевых камер содержит тангенциальный питающий канал 8, одну или несколько кольцевых камер 9, связанных между собой тангенциальными каналами 10, и предназначена для направления потока рабочей среды по касательной к поверхности 11 кольцевой камеры 9. Полость 2 имеет также поверхности 12,13. Прокладки 5 регулируют величину зазора 14 между рабочим торцом 15 корпуса 1 и поверхностью 16 диска 6. В диске 6 выполнено по крайней мере одно сквозное отверстие 17. Вакуумная камера 18 образована уплотнением 19, выполненным из резины. Внутренняя поверхность 13 полости 2 сопряжена с рабочим торцом 15 корпуса 1 посредством криволинейной поверхности 20.
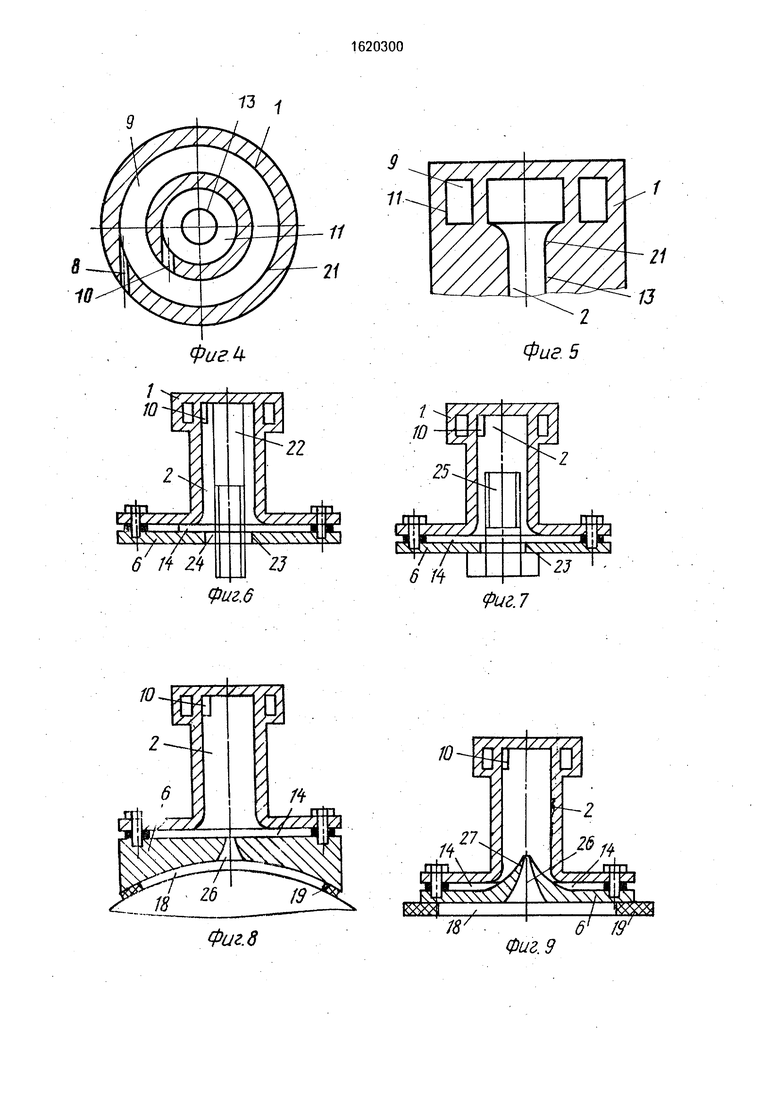
Как показано на фиг.З, тангенциальных питающих каналов 8 и тангенциальных каналов 10 может быть несколько. Внутренняя поверхность 13 полости 2 может иметь криволинейный участок 21 (фиг.4,5).
Возможен вариант выполнения схвата для удержания и завинчивания детали типа шпильки 22 (фиг.6). В этом случае в диске 6
выполнено отверстие 23, в котором с зазором 24 размещена шпилька 22.
Возможен вариант выполнения схвата для удержания детали типа болта 25 (фиг.7).
Возможен вариант выполнения схвата
для удержания детали шарообразной формы (фиг.8). Отверстие 17 выполнено профилированным в виде сужающегося сопла 26. Поверхность 13 диска 6 может быть вы0 полнена конусообразной (фиг.9). Конусообразная поверхность 27 обеспечивает наиболее эффективный профиль зазора 14. Система 7 концентрично расположенных кольцевых камер может содержать не5 сколько кольцевых камер 28, соединенных тангенциальными питающими каналами 29 (фиг. 10).
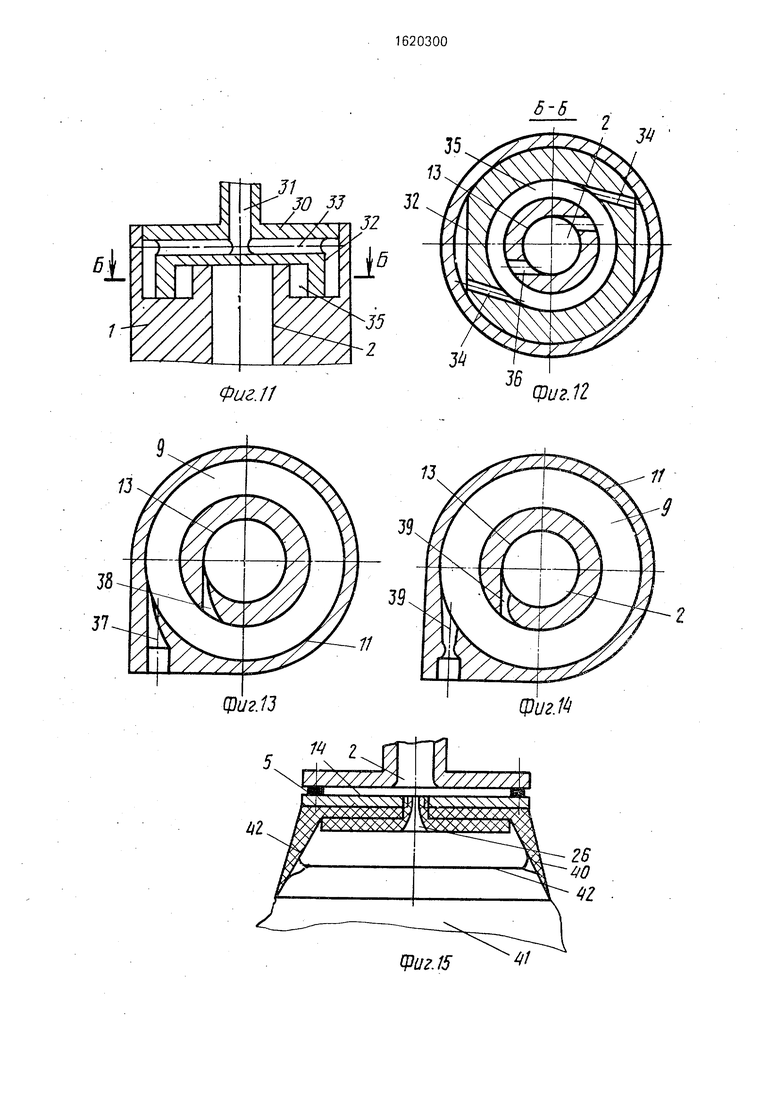
Возможно исполнение охвата с центральным подводом рабочей среды
0 (фиг.11,12). В этом случае на корпусе 1 закрепляется крышка 30 с подводящим каналом 31. В крышке 30 выполнены лыски 32 с радиальными каналами 33 и тангенциальными каналами 34. Лыски 32 и каналы 33,34
5 предназначены для подачи рабочей среды в кольцевую камеру 35. Тангенциальные каналы 36 соединяют кольцевую камеру 35 с полостью 2.
Тангенциальный питающий канал 8 и
0 тангенциальные каналы 10 могут быть выполнены в виде сужающихся сопл 37,38 (фиг. 13), или в виде сужающихся и расширяющихся частей сопл, т.е. в виде сопл Лаваля 39 (фиг. 14).
5Возможно выполнение схвата для захвата и удержания мешкотары (фиг.15). В этом случае диск 6 снабжен присоской 40, деформирующейся в соответствии с формой мешка 41. Воздухопроницаемая оболочка
0 42 выполнена в виде тонкой металлической или неметаллической сетки.
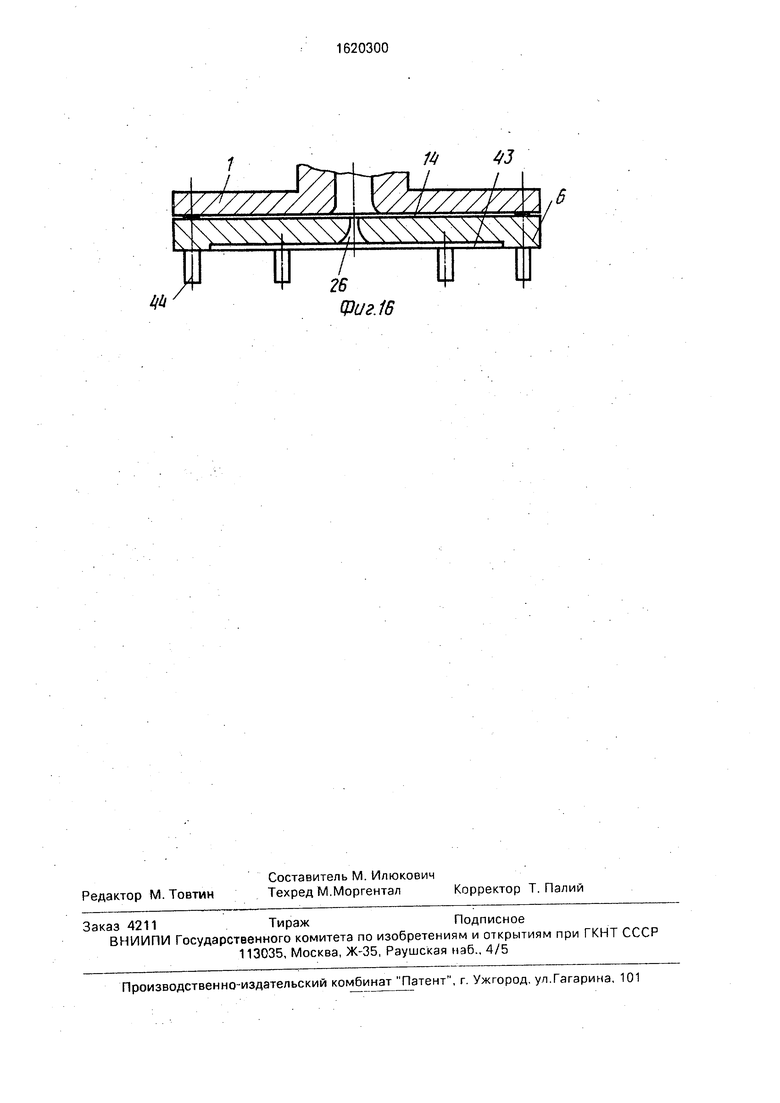
Возможно выполнение схвата для удержания нагретых или охлажденных объектов1 В этом случае на диске 6 выполнено углуб5 ление 43. Упоры 44, закрепленные на диске 6, обеспечивают создание потока окружающей среды через сопло 26. Этот поток охлаждает нагретую деталь и нагревает охлажденную деталь до температуры окру0 жающей среды.
Устройство работает следующим образом.
Рабочая среда поступает по тангенциальному питающему каналу 10 в систему 7
5 кольцевых камер. Из одной кольцевой камеры 9 в другую рабочая среда поступает по тангенциальным каналам 10. Затем рабочая i среда поступает в полость 2 корпуса 1, откуда она через зазор 14 истекает в атмосферу. За счет закручивания потока рабочей среды
в центральной части полости 2 создается разрежение. Из вакуумной камеры 18 рабочая среда через отверстие 17 поступает в полость 2. В вакуумной камере 18 создается разрежение и захватываемая деталь удерживается. Для открепления детали отключается подача рабочей среды.
Формула изобретения 1. Пневматический схват, содержащий полый корпус с питающим каналом и диск, установленный на рабочем торце корпуса с зазором, при этом в диске выполнено по крайней мере одно сквозное отверстие, о т0
пинающийся тем, что, с целью повышение грузоподъемности, он дополнительно чбжен системой концентрично расположенных кольцевых камер, сообщающихся между собой тангенциальными каналами, причем питающий канал также выполнен тангенциальным и соединяется с внешней кольцевой камерой упомянутой системы, а внутренняя кольцевая камера этой системы соединена тангенциальным каналом с полостью корпуса.
2. Схват поп.1.отличающийся тем, что поверхность диска, обращенная к корпусу, выполнена конусообразной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический вихревой схват | 1990 |
|
SU1761464A1 |
| Пневматический вихревой схват | 1990 |
|
SU1763176A1 |
| Пневматический схват | 1990 |
|
SU1812102A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2001 |
|
RU2199432C2 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2002 |
|
RU2202466C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2179504C1 |
| Пневматический схват | 1988 |
|
SU1582511A1 |
| Пневматический захват для плоских деталей | 1982 |
|
SU1024275A1 |
| СТРУЙНЫЙ ЗАХВАТ | 1995 |
|
RU2090352C1 |
| ГИДРОЦИКЛОН | 2005 |
|
RU2302907C2 |
Изобретение относится к машиностроению и может быть использов-ано в робототехнике. Целью изобретения является повышение грузоподъемности схвата Схват содержит полый корпус 1, полость 2 которого соединена с тангенциальным питающим каналом 8 через систему кольцевых камер 28, сообщающихся между собой тангенциальными каналами 29 На корпусе I с зазором установлен диск, имеющий по крайней мере одно сквозное отверстие, соединяющее полость 2 с вакуумной камерой, образованной поверхностью диска и уплотнением При работе устройства рабочая среда поступает через тангенциальный питающий канал 8 во внешнюю кольцевую камеру 28, где она закручивается Перемещаясь далее по тангенциальным каналам 29 и кольцевым камерам 28, рабочая среда в виде вихревого потока поступает в полость 2, откуда истекает в атмосферу через зазср между диском и корпусом 1 В центральной части полости 2 создается разрежение и деталь захватывается 1 з п ф-лы 16 ил МП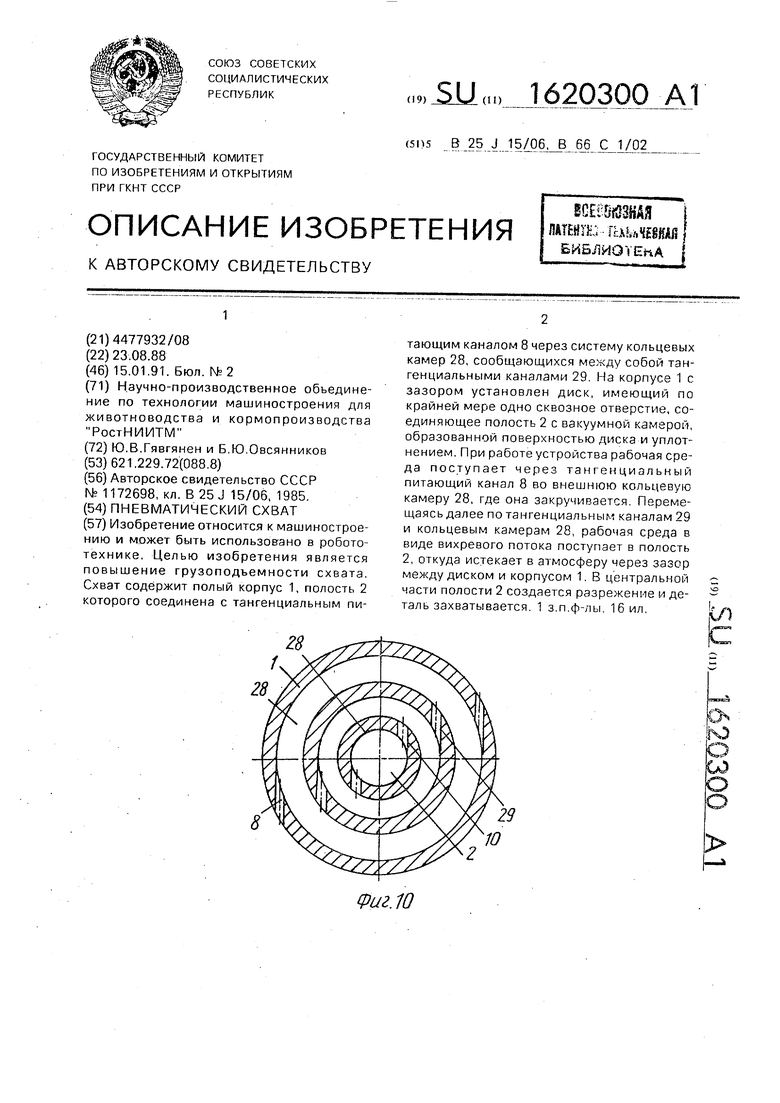
16 18 6
А- А
11
/3
Фиг. 2
17
Фиг 1
фигЪ
Фиг Цб ft Z4
Фиг.6
fOJ
Фиг. 8
13
Фиг 5
Фиг. 7
/8
19
Фиг. 9
о о
СП
о
CN
to
Г
/
&Л
14
I
43
I
УЛ////У/,
Фиг. 16
| Пневматический схват | 1984 |
|
SU1172698A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
