(54) СПОСОБ ПОДАЧИ И ТОЧНОГО ОСТАНОВА ХЛЫСТОВ НА РАСКРЯЖЕВОЧНЫХ УСТАНОВКАХ
1
Изобретение относится к лесной и деревообрабатывающей промышленности и может быть использовано в подъемно-транспортном оборудовании для создания позиционных приводов, например, на раскряжевочных установках с продольной подачей хлыстов для отмера длин сортиментов.
Известен способ подачи и точного останова хлыстов, включающий задание позиции, останова, разгон, движение с установивщейся скоростью, торможение посредством взаимодействия с упором и отключение привода. При этом измеряют диаметр хлыста и в зависимости от его величины изменяют проходное сечение дросселя в гидродемпфере, т. е. тем самым изменяют усилие торможения в зависимости от диаметра хлыста при неизменном тормозном пути, затем привод реверсируют и возвращают хлыст в позицию останова 1.
Недостатком данного способа является его невысокая производительность вследствие необходимости перебега хлыста и последующего реверсирования привода подачи и несоответствия массы хлыста его диаметру. При слищком большом тормозном усиЛИИ хлысты малой массы не доходят до датчика крайнего положения, подающего команду на реверсирование, что снижает производительность и затрудняет работу в автоматическом режиме, а при приложении малого усилия торможения для хыстов с большой массой возможны повышенные динамические нагрузки на кинематическую цепь упор-демпфер, что приводит к повышенному износу, возникновению люфтов в кинематических парах и снижению точности отмера. Таким образом, данный способ позиционирования объектов с меняющейся массой хлыстов, заключающийся в приложении меняющегося в зависимости от диаметра хлыста тормозного момента при неизменном тормозном пути, не обеспечивает производительности и приводит к появлению повыщенных динамических нагрузок в кинематических парах.
20 Известен также способ подачи и точного останова хлыстов на раскряжевочных установках, включающий задание позиции останова, разгон хлыстов, движение с установившейся скоростью подачи, выбор позиции начала торможения и собственно торможение. На всех участках движения измеряется неремещение подаваемого объекта - хлыста, а выбор позиции, в которой двигатель переводят на пониженную скорость, осуществляется с учетом параметров хлыста, измеряемых датчиками размерных и качественных параметров хлыста 2.
Этот способ предполагает формирование для каждого хлыста некоторой индивидуальной фазовой траектории (фазового потрета) на участке торможения в зависимости от размерных параметров хлыста, имеет еле дующие недостатки. Масса хлыста оценивается со значительными погрещностями вследствие того, что не учитывается, например, плотность древесины, которая может меняться от 0,4 До 1,1 т/м, далее само по себе точное измерение объема каждого хлыста и его последующих частей в поточной линии является достаточно трудной задачей и требует применения сложной и дорогостоящей аппаратуры. Обычно же объем хлыста определяется по диаметру, например, комля и длине хлыста, однако при таком способе неизбежны ощибки в измерении объема, так как форма ствола может значительно отличаться от цилиндрической. Кроме того, соверщенно неясно, каким образом производятся измерения при случайной или намеренной подаче нескольких однотипных хлыстов одновременно; таким образом неизбежны значительные ощибки в определении массы, на величину же тормозного пути оказывает влияние именно мае-са хлыста. Соверщенно не учитывается статический момент двигателя привода, зависящий от сил трения в кинематических цепях привода и подающего механизма; величина статического момента, от которого также в немалой степени зависит тормозной путь, может меняться в больших пределах. Таким Ьбразом, определение оптимальной фазовой траектории на участке торможения при осуществлении известного способа является в принципе невозможным, именно поэтому известный способ предполагает для достижения заданной точности предварительный перевод привода на пониженную скорость, что приводит к потерям в производительности установки.
Цель изобретения - повыщение производительности раскряжевочной установки путем более точного определения начала торможения.
Цель достигается тем, что измеряют максимальное ускорение при разгоне каждого хлыста и установивщуюся скорость подачи, с учетом которых осуществляют выбор позиции начала торможения.
Торможение производят с постоянным усилием.
Максимальное ускорение определяют через фиксированный отрезок времени с момента разгона хлыста.
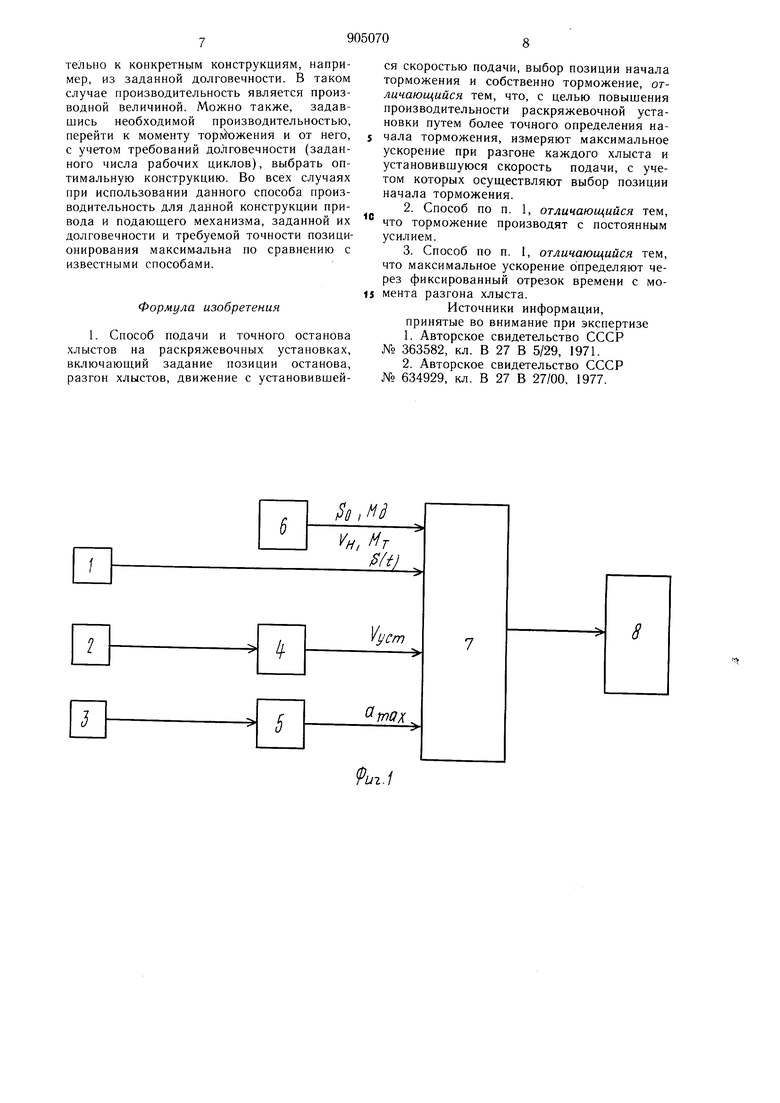
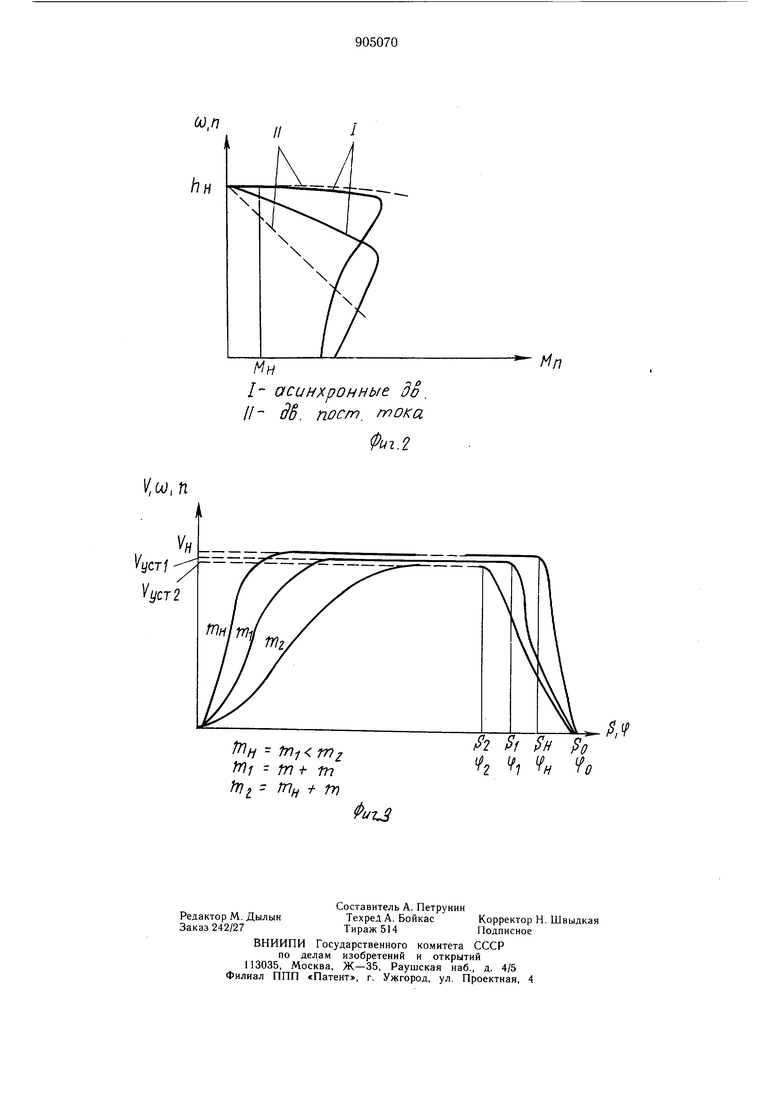
На фиг. 1 изображена функциональная схема; на фиг. 2 - механические характеристики некоторых типов электродвигателей; на фиг. 3 - фазовые траектории для разных масс движущейся системы.
Функциональная схема (фиг. 1) включает датчики 1, 2 и 3 перемещения, скорости и ускорения хлыстов соответственно. Датчик 2 скорости подключен ко входу блока 4 определения установивщейся скорости, а датчик 3 - ко входу блока 5 определения максимального ускорения при разгоне. Выходы блоков 4 и 5, как и блока 6 подключены к входам арифметического блока 7, выход которого в свою очередь соединен с блоком 8 управления приводом.
Способ осуществляется следующим образом.
Тормозной путь движущейся системы кинематическая цепь привода - подающий механизм - хлыст зависит от массы, силы торможения, начальной скорости и движущей силы. Если же на участке торможения двигатель отключается, то последний фактор не учитывается. Для системы, приведенной к валу двигателя, можно записать:
f (3,., Мп ), (
tf - угол поворота вала на участке
торможения;
-.J - момент инерции системы; - начальная угловая скорость; /v j -момент на валу на участке торможения.
Мп MC + MT,
где MC - статический момент, определяю0щийся в основном трением в кинематических цепях; MT искусственно прикладываемый
тормозной момент.
Таким образом, если считать тормозной момент М известным и неизменным, то для определения тормозного пути движущейся системы необходимо определить непосредственно перед торможением момент инерции системы, ее начальную скорость и статический момент двигателя. Из названных факторов можно определить начальную скорость, она равна установивщейся скорости подачи и ее можно непосредственно измерить при помощи любого серийного датчика. Что касается остальных факторов, то простыми средствами их определить гораздо сложнее, особенно момент инерции системы, так как масса подаваемых хлыстов может меняться почти на два порядка. Однако система позиционирования хлыстов имеет одну особенность - время цикла подачи измеряется единицами секунд, а величины перемещений - метрами. За это время ни момент инерции, ни статический момент не могут сколько-нибудь значительно измениться и поэтому для определения указанных факторов можно использовать предыдущие перед торможением участки движения, участок разгона и участок движения с установивщейся скоростью подачи, что дает в принципе возможность выбора позиции начала торможения, т. е. формирования оптимального фазового портрета участка торможения В общем виде движение системы может быть описано таким образом: I - - лл лл dt где Мдв- момент, развиваемый двигателем. В этом уравнении два неизвестных I и , но MC может быть определен уже на участке движения с установивщейся скоростью, так как для большинства типов электродвигателей существует однозначная зависимость (по крайней мере на рабочем участке характеристики) между скоростью и моментом на валу, описываемая механической характеристикой, что дает возможность оценивать статический момент, на участке движения с установивщейся скоростью момент на валу равен статическому моменту, т. е. Ускорение, как и установивщаяся скорость, может быть сравнительно легко измерено как в аналоговой, так и в цифровой форме. Таким образом, уравнение (1) с учетом уравнений (2) и (3) можно записать f{, ), причем ускорение -Ф может измеряться каж дый раз либо через фиксированный отрезок времени с момента начала движения в период переходного процесса разгона, либо определяется максимальная величина ускорения за период переходного процесса. Осуществление способа можно пояснить также работой устройства, изображенного на фиг. 1. Сигналы от датчика 2 скорости и датчика 3 ускорения поступают соответственно на блок 4 определения установивщейся скорости и блок 5 определения максимального ускорения. При этом сигнал на выходе блока 5 появляется в момент, когда ускорение максимально, т. е. во время переходного процесса. С другой стороны, блок 5 может измерять, например, ускорение через некоторое фиксированное время с момента начала движения. Это время должно быть меньще минимального времени переходного процесса при разгоне. Однако первый вариант предпочтительнее, так как в том случае, если движущаяся система представляет собой многоемкостной объект, что определяется лищь ее конструктивными особенностями, не исключается возможность измерения ускорения на начальных пологих участках характеристик, например, для хлыстов с большой массой, вследствие чего вносятся некоторые искажения, масда хлыста может искусственно завыщаться. Техническая реализации этого варианта несколько проще. Сигнал на выходе блока 4 появляется лищь тогда, когда скорость подачи неизменна, т. е. уже после переходного процесса. Сигналы с выходов блоков 4 и 5 поступают на арифметический блок 7. На соответствующие входы того же блока поступают сигналы от датчика 1 перемещения, а также данные от задатчика (блока памяти) 6, соответствующие величинам заданного перемещения TO , номинальной установившейся скорости подачи Lj (п j ), искусственно создаваемого тормозного момента М . Блок 8 обрабатывает эти данные в соответствии с заложенной в него программой. По величине отклонения установившейся скорости подачи Wycy от номинальной tJ определяется статический момент М (фиг. 2). Величина номинальной скорости измеряется при отсутствии хлыста на подающем механизме, при минимальном моменте сопротивления, т. е. при минимальной силе трения в кинематических парах, например, после, технического обслуживания линии. Остальные факторы, необходимые для нахождения момента инерции из уравнения (2) - ускорение и момент двигателя Мд подаются соответственно с блока 5 и блока 6. Последний представляет собой запоминающее устройство, в котором кроме момента двигателя и номинальной скорости постоянно записан также и тормозной момент, необходимый для вычисления величины тормозного пути. Величина перемещения - расстояние до позиции останова So (фиг. 3) - задается в каждом цикле оператором. Из этой величины вычитается величина тормозного пути, в результате чего формируется код (на фиг. 3 Si ((,), S2() и S3(ifj), отключения двигателя привода и включения тормоза. При совпадении этого кода с кодом, поступающим от датчика 1 перемещения, блок 7 выдает команду на отключение привода и включение тормоза. Движущаяся система кинематическая цепь привода - подающий механизм - хлыст через некоторое время останавливается, причем разность между значением (So) и координатой переднего торца хлыста (выбег) лежит в заданных пределах. Величина тормозного пути в значительной степени зависит от прикладываемого тормозного момента М. Этот момент может быть выбран применитеЛьно к конкретным конструкциям, например, из заданной долговечности. В таком случае производительность является производной величиной. Можно также, задавшись необходимой производительностью, перейти к моменту торл ожения и от него, с учетом требований долговечности (заданного числа рабочих циклов), выбрать оптимальную конструкцию. Во всех случаях при использовании данного способа производительность для дайной конструкции привода и подающего механизма, заданной их долговечности и требуемой точности позиционирования максимальна по сравнению с известными способами.
Формула изобретения
1. Способ подачи и точного останова хлыстов на раскряжевочных установках, включающий задание позиции останова, разгон хлыстов, движение с установивщейся скоростью подачи, выбор позиции начала торможения и собственно торможение, отличающийся тем, что, с целью повышения производительности раскряжевочной установки путем более точного определения начала торможения, измеряют максимальное ускорение при разгоне каждого хлыста и установившуюся скорость подачи, с учетом которых осуществляют выбор позиции начала торможения.
2.Способ по п. 1, отличающийся тем, что торможение производят с постоянным усилием.
3.Способ по п. 1, отличающийся тем, что максимальное ускорение определяют через фиксированный отрезок времени с момента разгона хлыста.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 363582, кл. В 27 В 5/29, 1971.
2.Авторское свидетельство СССР № 634929, кл. В 27 В 27/00, 1977.
Ми
/- acuH)(pOHHbfe дё. II- дё. пост. /Г)ока
Ип
Фиг.2
/,U),n н - 1 - т т 1 щ + т 2 1 Н г 1 н Фи-iJ , о 0