равлеаия триводами механизма лодачи и подвижного «змерительното упора п-ри подаче, точном остано1ве хлыстов « их раскряжевке.
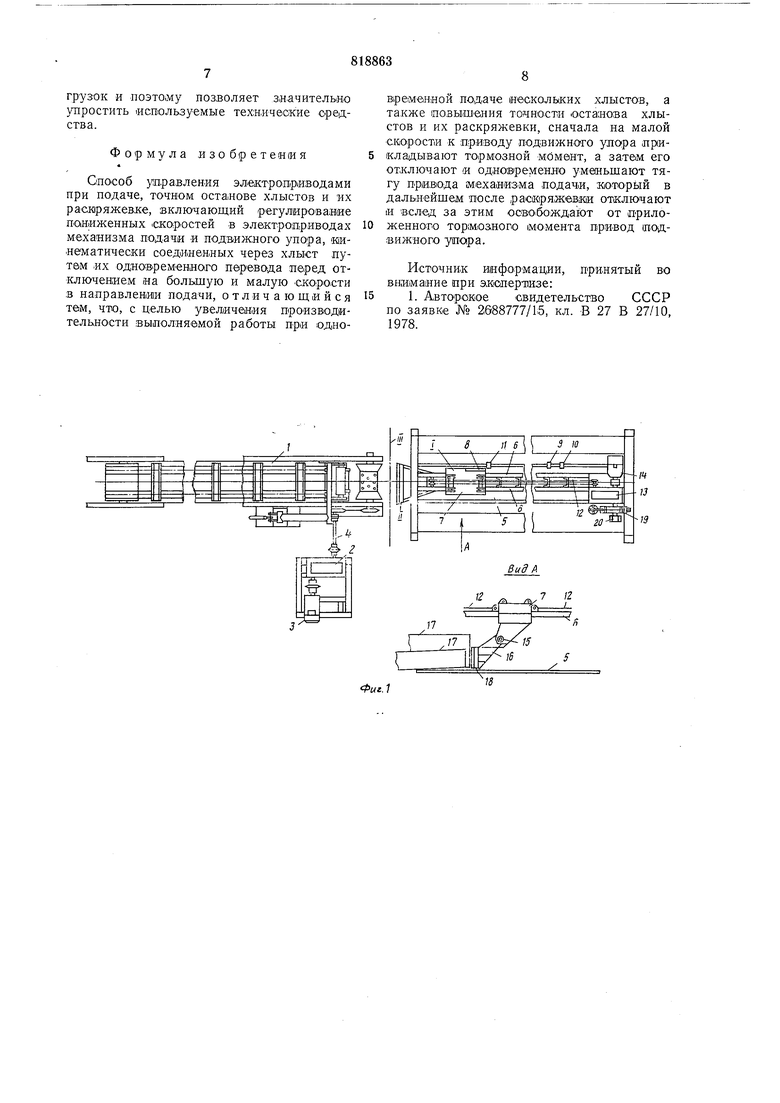
Устройство для реализации процесса управления гори , точном останове хлыстов и их раскряжевке по предлагаемому спо.собу состоит (фиг. 1) из механизма / (подачи € приводом 2, содержащим электродвигатель 3, .ии«ематичбскую цепь 4, п;р1иеМ(НЫЙ стол 5, над которы м в наиравляющих 6 подвижно закреилена каретка 7 с шунтом 8, взаимодействующим с бесконтактными датчиками (например КВ.П-8). На фиг. 1 (показаны два датчика (для одной из позиций останова) предварительный 9 и основной }0, а также датчик J-l исходного положения упора. Карет-ка.7 цепной передачей 12 через редуктар 13 соединена с электродви гателем 14 привода упора. На карет1ке 7 при помощи шарнира J5 закре1Плен jlnop , выставленный навстречу движения хлыстов 17 (показаны два хлыста) и осуществляющий под их действием силовое замыкаиие упора через роликовые опоры 18 с ра бочей поверх,ностью приемного стола 5. Привод упора 14 .снабжен механическим тормозо1М 19 с злектрогидравли1ческйм приводом, а тахогенератором 20.
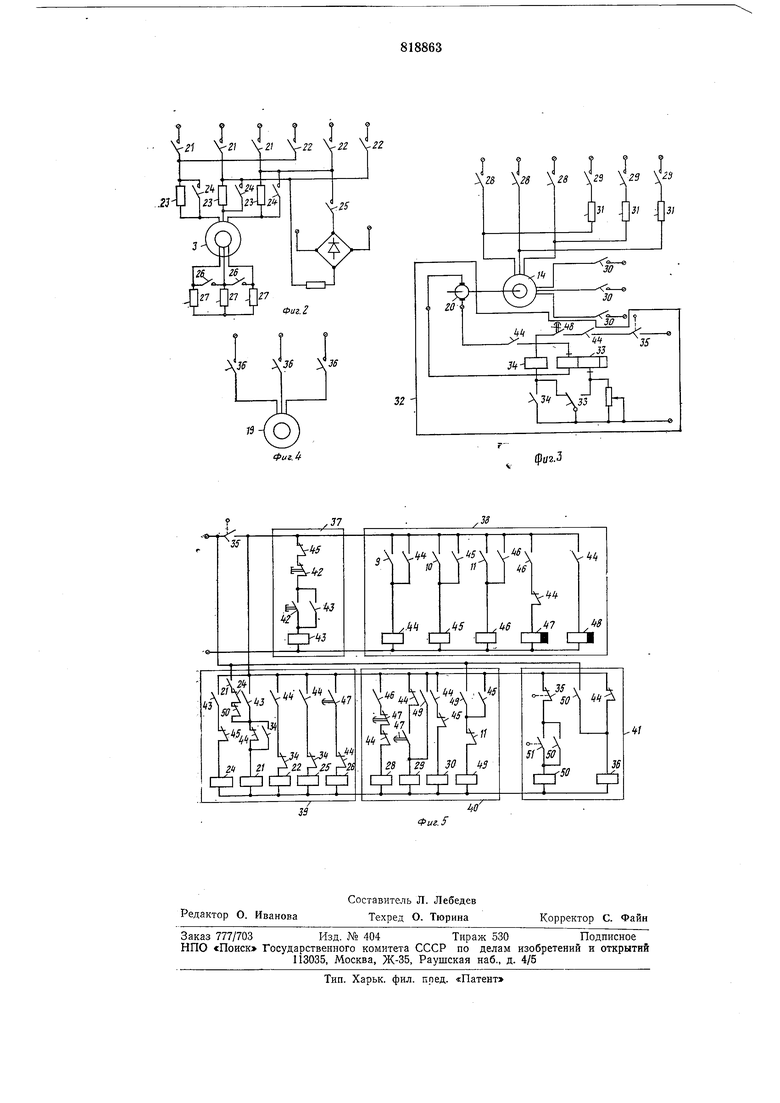
Привод механизма подачи (фиг. 2) содержит электрод вигатель 3, который подсоединен к трехфазной сети пускателями 21 (вперед), 22 (назад), шунтирующим статорные сопро-пивления 2 пускателем 24, а ос цепи динамического торможения - пускателем 25. В роторной .цепи .используется пускатель 26, шунтирующий сопротивлен1ия 27.
Привод упора (|фиг. 3) содержит двухскоростной асинхронный двигатель (например Т2-52-1672 с глубиной регул1ираваиия 8:1), который лодклю1чен к сети пускателями большой скорости 28 (вперед), 29 (назад) и малой скорости 30 (вперед). В статорной цепи включены сопротивления 5.7.
Привод упора снабжен |реле 32 контроля скорости, содержащим тахогенератор 20, поляризованное реле 33, прО(Межуточное реле 34. Кроме того, ;в схеме реле контроля скорости используетоя контакт «35 верхнего пололсения пилы.
Двигатель электрогидравлического привода (фиг. 4) механического тормоза 19 привода упора подключен к сети пускателем 36.
Схема управления (фиг. 5) приводами содерлсит задатчик 37 позиций останова хлыстов, блок 38 контроля их перемещений, блок 39 управления приводом, блок 40 управления приводом упора, блок 41 управления электродвигателем гидротолкателя механического тормоза 19.
Задатчик 37 позиций останова хлыстов лсловно показан для одной позиции останова и оодержпт кнапочную станцию 42 и реле 43 заказа.
Блок 38 контроля перемещения хлыстов содержит реле-повторители 44-46 выходных реле предварительного и основного датчиков 9, 10 и датчика // исходного полО|Же1Н.ия упора, а также реле времени 47, 48.
Блок 39 управления приводом механизма подачи содержит катуш.ки пускателей
21,22, 24, 23, 26.
Блок 40 управления приводом упора содержит катушки пускателей 28, 29, 30 и промежуточное реле 49.
Блок 4.1 управления электродвигателем гидротолкателя механического то рмоза 19 содержит 1катущку пускателя 36, П1ромежуточное реле 50 и контакт конечного выключателя 51 нижнего положения пилы.
Способ управления электроприводами при подаче, точном останове хлыстов и их раскряжевке осуществляется следующим образом: Перед началом работы KapeTiKa 7 занимает положение I, а выста1влениый навстречу движения хлыста упор 16 наход ится на расстоянии Э-5 см от оюи /// пилы в положен1ИИ //.
Оператор нажимает кнопку 42 (фиг. б) и включает реле 43. Последнее в .блоке 3;Р включает пускатели 21, 24. Двигатель 3 начин aieT разганять хлысты 17 .совместно с ynopoiM 16. При этом осуществляется яатяжка Ценной передачи 12 и каретка 7 щунтом 8 вклю-чает датчик .//, который включает реле 46, а последнее в бло.ке 40 вяслючает пускатель 28. Осуществляется совмесный разгон дви)гателя 3 и 14.
После 01К.О Нчания разгона включается реле 47 времени, которое в |бло.ке 50 отключает пускатель 28 и .включает пуакатеЛ.И 26 и 29. При этом двигатель 14 переключается В режим .ограниченного противовключения и упор 16, перемещаясь на рабочей скорости (напри.мер 2,5 ж/с) совместно с хлыстами, поджимается к их торцам с ограниченным усилием 30-50 кг, не препятствуя перемещению хлыстов, а сам упор 16 чер.ез опору 18 замыкается ic раб.очей поверхностью приемного стола 5 и при этом существенно разгружается при силовом взаимодействии хлыстов 17 каретка 7 и направляющие 6.
На рабочей скорости шунт 8 воздействует «а предварительный датчик 9, выходное реле которого включает в блоке 38 реле 44.
Последнее в блоках 35-41 отключает пускатели 2,1, 26, 36 и включает пускатели
22,25, 30. Осуществляется одновременное двухтоковое торможение двигателя 3 и рекуперативное торможение двигателя 14. Одновременно реле 44 (фиг. 3) подключает тахогенератор 20 к поляризованному реле 33, контакт которого перебрасывается в крайнее правое положение. С выдержкой Бремени включается реле 48, которог подготавливает цель реле 34, ,но последнее .из-за разрыва контакта 33 остается выключенным. Несмотря .на отключение пускателя 36 двигателя лидротолкателя из-за йИ1ерщионяости его сра батЫВайия механичеокий тормоз 19 остается иекото рое время разоМ(К,нутым. При снижении OKOipocTiH упора и хлыста до задаиного уровня пониженной юкорости поляризова«ное реле 33 отключается и его «QHTaiKT перебрасывается в крайнее левое положеНИе и включает реле 34, которое отключает пускатели 22, 25 и включает пускатель 21. Одновременно полностью замыкается механический тормоз 19. Хлысты «нтенсивно уиираются в упор, ио двдагатель 14 привода упора, работающий в режиме рекуиеративйого торможения, а та.кж€ его полиостью замкнутый механический тормоз 19 не позволяют двига1телю 3 и хлыстам разогнаться сверх малой скорости, заданной двигателем 14. Осуществляется илтеНОивное выравнивание торцов хлыстов и их перемещение на скорости дотягивания (например 0,3 м1с). На скорости дотягийаиия кроме выравнивания торцов хлыстов одноврембЕно выбираются все люфты и слабина в кинематические парах и шбких тяговых органах. При воздействии шунта 8 каретки 7 на основной датчик -.10 .срабатывает его выходное реле, которое включает реле 45. Последнее отключает пускатели 24 и 30, а включает реле 5 и пускатель 29. Так как меха1ничеок1ий оюрмоз 19 привода улора уже .замокнут, то осуществляется точный OiCTaHOB хлыстав при сохранении выравненными их торщов. Ори этом двигательный :момент двигателя 3 (за счет отключения пускателя 24) у1меньщается в неС1коль ко раз и не .может сдвинуть упор с позиции останова, но одновременно с небольшим усилием поджимает торцы хлыстов к упору, сохраняя вьгбранньши зазоры в кинематических иарах (прИ1водов и натяг ПИб.К1Их тяговых органов, а также препятствуя вр-едному отходу торщов хлыстов от упора и заданной ил останова. Реле 45 дает команду «а опускание лилы (здесь не показана) и при этом контакт 32 (верхнее положение пилы) снимает большинство блокировок. После раскряжевки нескольких хлыстов иила воздействует на конечный выключатель 51 ее нижнего положения, который в блоке 41 включает реле 50. Последнее дает команду гидросис теме (здесь не показана) на сброску сорти ментов с приемного стола, а также вклю чает пукатель 36 двигателя гидротолкателя меха,н1ического тармоза 19 т последний рас тормаживается, а упор начинает переме щаться в исходное положение к пиле. Реле 50 также отключает пускатель 21 двигате я 3 .вперед, так как после раскряжевки охранение точности останО;Ба хлыстов уже е требуется. При возврате пилы в верхнее положение блоке 41 контактом конечного в гклЮчаеля 35 ее верхнего положения отключаетя реле 50, но пускатель 36 остается вклюенным, а тормоз .19 - р|астор|Може Нным. оэтО|Му при последующем заказе механ1Иее кий тормоз с приводом плавного замыания не препятствует разгону хлыстов совестно с ynopOiM и не увеличивает продолительность процесса их подачн. Использование предлагаемого способа правления электроприводами при подаче, очном останове хлыстов и и;х ра-скряжевке беспечивает по сравнению с существуюими способами следующие преимущества: Действие механического тормоза со стороны привода подвижного измерительного упора более эффективно, так как одновременно с :БОЗ.мо Жностью повыщения скорости дотягивания осуществляется выра|внивание (|ил.и сохранение их BbipaiBHeHHbiMn) торцов нескольких хлыстов, что позволяет автоматизи ровать точный 0|Станов нескольких одновременно подаваемых хлыстов, следовательно, существенно увеличит производительность раскряж1евочной установки. Действие механических тормозов со стороны (Привода упора эффективно та,юке по той причине, что -механический тормоз осуществляет торможение двигателя упора знач1ительно меньшего ло {Мощности и запасенной кинетической энергии (чем двигатель механизима падачи), ио со стороны хлыста этбт привод соединен через ускоряющую передачу, и поэтому ротор его двигателя является по отнощению к хлысту очень большим маховиком. Поэтому по отношению к хлысту тривод упора в целом приобретает свойства не только интенсивного механического :тормозного устройства, но и инерционного тормоз-а. Эффективность механических тормозов со стороны привода подвижного 1измер.ительного упора значительно увеличивается также за счет того, что передаточное отношение привода подвижного упора может быть значительно больще, чем привода механизма подачи. Например, при использовании двигателя 3 подачи типа МТГ-411-8, используемого ,на раскряжевочной установке ЛО-15С, и двигателя 14 привода упора типа T2-52-I6/2, передаточное отнощение привода упора может быть s четыре раза больше, чеим привода подачи. Существенным здесь Я1вляется также то, что повышение точности останова и сокращение продолжительности подачи (за счет более интенсивного торможения приводом ПОдачи и упора и возможности увеличения скорости дотягивания) достригается без ударов в упор и увеличеиия динамическзи; нагрузок и поэтому позволяет з,н-ачительно упростить используемые технические средства.
Формула изобретения
«
Способ управления электроприводами при подаче, точном останове хлыстов и их расмряжев е, включающий р-егулировамие пониженных .скорОстей в электроприводах механизма подачи и подвижного упора, кинематически соединенных через хлыст путем :нх одновременного перевода перед отключением на большую и малую скорости :в направлении подачи, отличающийся тем, что, с целью увеЛ(Иче|Ния производительности выполняемой работы при одновременной подаче нескольких хлыстов, а та,кже повышения точности останова хлыстов и их раскряжевки, сначала на малой скорости к приводу подвижного упора .прикладывают тормозной момент, а зате1М его отключают (И одноэрелменно умеяьщают тягу привода механизма подачи, который в дальнейшем после расиряжввюи отключают и вслед за этим освОбождайт от приложенного тормозного момента привод (подвижного упора.
Источник информации, принятый во внимание при акопертизе:
1. Авторское свидетельство СССР по заявке № 2688777/15, кл. В 27 В 27/10, 1978.
13
Фuг.f
Z8 2S s гэ V 1з Л5/ Лз;
32 -
(pi/г.З
J5
V44
Ф
12/v
«7
ivji V 4
г 2/
ЛЙИЙ
J5
4i
Фиг. 5
