1
Изобретение относится к лесной и деревообрабатывающей промышленности и может быть применено, например, в раскряжевочных установках с продольной подачей.
Извесно устройство для отмера длин сортиментов на раскряжевочных установках с продольной подачей, включающее подающий механизм с приводом, упоры, кинематически соединенные с гидродемпфером, датчики положения хлыста, прижимной ролик, ось которого кинематически связана с управляющем элементом дросселя гид.родемпфера 1.
Недостатками известного устройства являются потери производительности вследствие необходимости реверси-рования хлыста и неоптимальности его фазовой траектории движения,а также повышенные динамические нагрузки в приводе и подающем механизме.
Известно также устройство управления позиционным приводом на раскряжевочных установках с продольной подачей/ включающее датчик перемещения хлыста, выполненный в виде преобразователг перемещение-коди блок управления приводом 2},
в зависимости от размеров хлыста и от того, комлем или вершиной подается хлыст, определяется момент перевода двигателя привода в замедленный режим. Однако из-за неоптимальности фазовой траектории движения на участке торможения при работе на пониженной скорости производительность снижается. Это происходит из-за по10грешностей в определении массы хлысТа и позиции перевода привода на работу с пониженной скоростью.
Цель изобретения - повышение производительности раскряжевочной уста15новки путем более точного определения начала торможения.
Поставленная цель достигается тем, что устройство снабжено двумя последовательно соединенными дифференциру20ющими блоками, которые подключены к датчику перемещений, блоком определения установившейся скорости, который подключен к выходам дифференцирующих блоков блоком определения
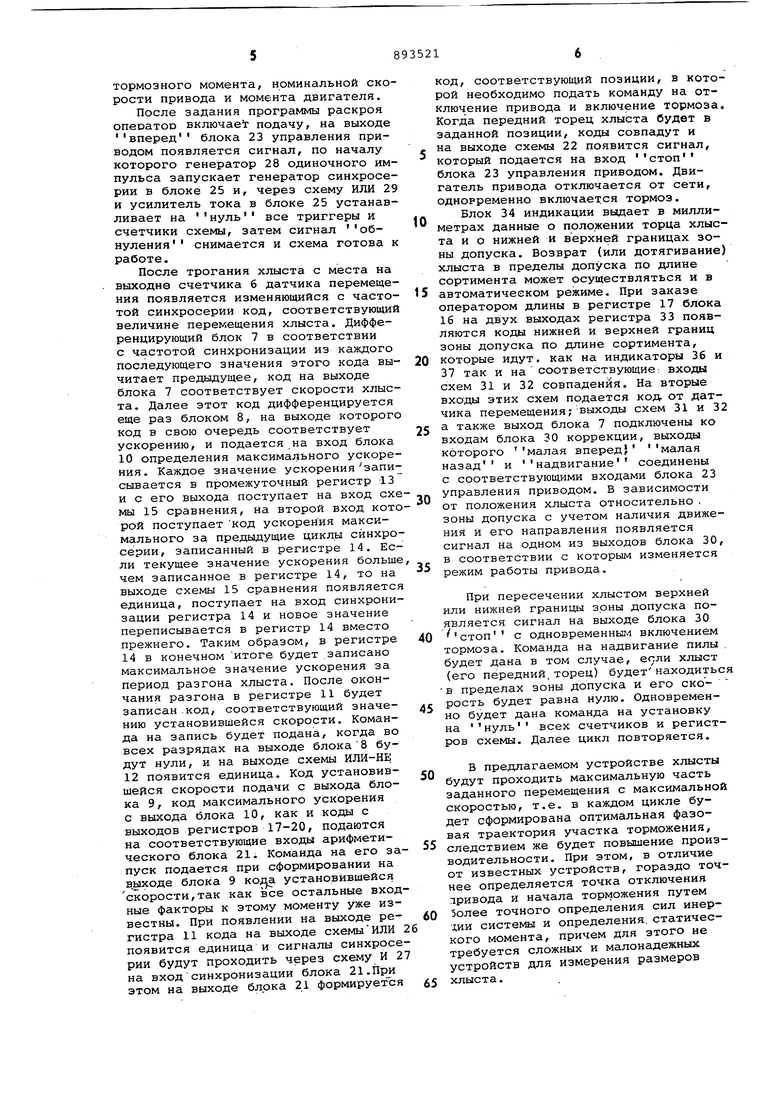
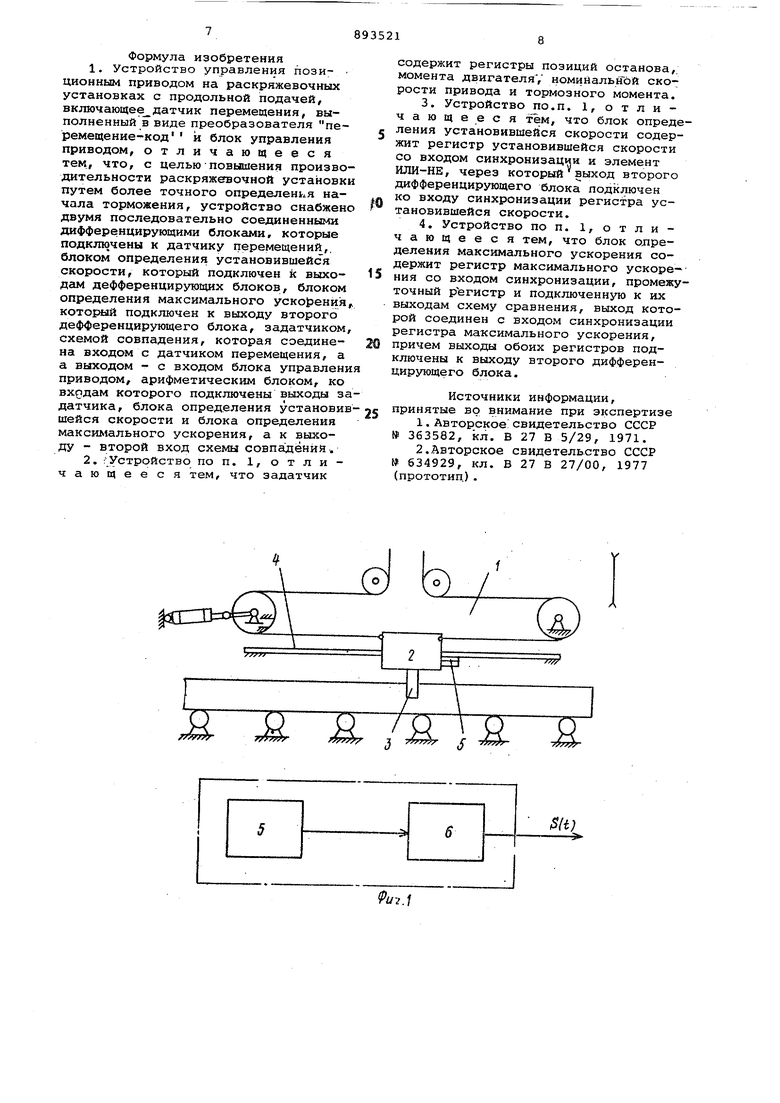
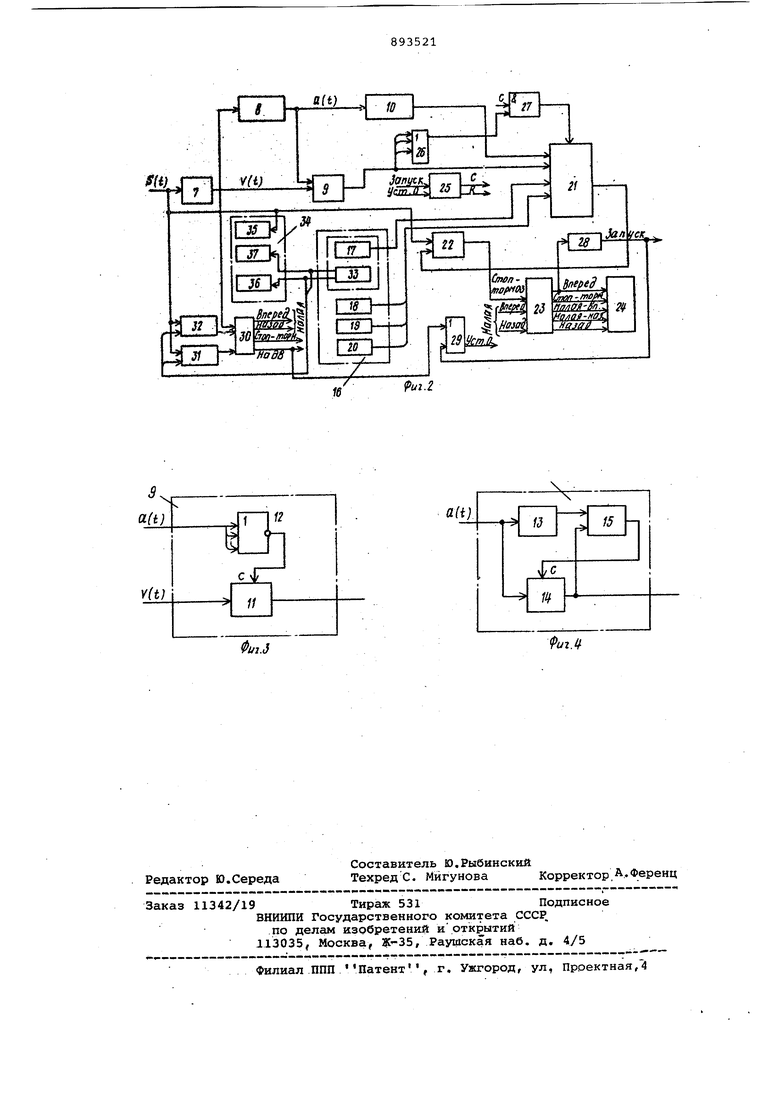
25 максимального ускорения, который подключен к выходу второго дифференцирующего блока, задатчиком, схемой совпадения, которая соединена входом с датчиком, перемещения, а выхо30дом - с входом блока управления приводом, арифметическим блоком,ко входам которого подключены, выходы задатчика,блока определения установившейся скорости и блока определения максимального ускорения, а к выходу - второй вход схемы совпаде.ния. Кроме того, задатчик содержит регистры позиций останова, момента двигателя, номинальной скорости при вода и тормозного момента, а блок определения установившейся скорости содержит регист15 установившейся скорости со входом синхронизации и элемент ИЛИ-НЕ, через который выход вто рого дифференцирующего блока подключен ко входу синхронизации регистра установившейся скорости, причем блок определения максимального ускорения содержит регистр максимального ускорения со входом синхронизации, проме жуточный регистр и подключенную к их выходам схему сравнения, выход которой соединен с входом синхронизации регистра максимального ускорения, пр этом выходы обоих регистров подключены к выходу второго дифференцирующего блока. . На фиг. 1 изображен подающий меха низм с датчиком перемещения; на фиг. 2 - функциональная схема устрой ства; на фиг. 3 - функциональная схе ма блока определения установившейся скорости; на фиг. 4 - функциональная схема блока определения максимального ускорения. Подающий механизм с позиционным приводом выполнен в виде канатоблоч ной системы 1, на которой закреплена каретка 2 с захватом 3, установленная в направляющих 4. На каретке закреплен датчик перемещения, выпол ненный в виде преобразователя 5 перемещение-код и подключенного к нему счетчика 6, код на выходе которого соответствует величине перем щения каретки 2. Выход.счетчика б подключен ко входу дифференцирующего блока 7, выход которого в свою очередь, подключен ко второму .дифференцирующему блоку 8 и ко выходу блока определения установившейся скорости Выход блока 8 подключен ко второму входу-блока 9, а также на вход блока 10 определения максимального ускоре ния. Блок 9 содержит регистр 11 установившейся скорости, вход которого подключен к выходу дифференцирующего блока 7. Ко входу синхронизации регистра 11 подключен выход схешл -ИЛИ-НК 12, входы которой поразрядно соединены с выходом, блока 3. Блок 1 содержит промежуточный регистр 13 и регистр 14 максимального ускорения, выходы которых подключены ко входам схемы 15 сравнения; выход ее, в свою очередь, соединен со входом синхронизации- регистра 14, а входы обоих регистров соединены с выходом блока Устройство управления содержит также задатчик 16, представляющий собой набор запоминающих устройств регистров 17-20. По мере необходимости в блок .16 могут вводиться и другие регистры. Выходы блоков 9,10 и 16 подключены ко входам арифметического блока 21, представляющего собой вычислительное устройство. Выход блока 21 подключен к одному из входов схемы 22 совпадения, другой вход которой соединен с датчиком перемещения, а выход - со входом стоп блока 23 управления приводом, представляющим собой стандартный блок управления приводом любого подъемного или транспортного устройства; этот блок содержит кроме входов автоматического управления также элементы ручного управления приводом, а также элементы для осуществления необходимых блокировок. Вькоды блока 23 подключены непосредственно к обмоткам магнитных пускателей, входящих в состав блока 24 привода. Для управления работой всего ycTv. ройства управления предусмотрен блок 25 синхрониз-ации, вырабатывающий сигналы синхронизации (выход С) и сигналы установок нуля (выход R); цепи синхронизации и установки нуля на схеме не показаны. Для управления работой блока 21 предусмотрена схема 26 ИЛИ, входы которой связаны поразрядно с выходом блока 9, а выход связан с одним из входов схемы И 27, другой вход которой соединен с выходом синхронизации блока 25. Запуск блока 25 осуществляется от генератора 28 одиночного импульса, вход которого соединен с одним из выходов блока 23 управления приводом, например с выходом вперед . Для установки нуля, всех регистров перед рабочим циклом выход генератора 28 подключен через схему ИЛИ 29 к соответствующему входу блока 25 синхронизации. Устройство управления Может содержать также блок 30 коррекции, схемы 31 и .32 совпадения, регистр 33 коррекции, блок 34 индикации, содержащий совмещенные с дешифраторами индикатор 35 положения хлыста, индикаторы 36 нижней и 37 верхней границ допустимого разброса по длине. Устройство работает следующим образом. После отторцовки очередного хлыста оператор оцениваетего размерные и качественные параметры и задает длину сортимента (или же несколько длин) нажатия.на соответствующие кнопки в регистре 17 задатчика 16. На входе регистра 17 устанавливается соответствующий двоичный код. В регистрах 18-20 заранее записаны коды соответственно прикладываемого
тормозного момента, номинальной скорости привода и момента двигателя. После задания программы раскроя оператор включаег подачу, на выходе вперед блока 23 управления приводом появляется сигнал, по началу которого генератор 28 одиночного импульса запускает генератор синхросерии в блоке 25 и, через схему ИЛИ 29 и усилитель тока в блоке 25 устанавливает на нуль все триггеры и счетчики схемы, затем сигнал обнуления
снимается и схема готова к
работе.
После трогания хлыста с места на выходнв счетчика 6 датчика перемещения появляется изменяющийся с частотой синхросерии код, соответствующий величине перемещения хлыста. Дифференцирующий блок 7 в соответствии с частотой синхронизации из каждого последующего значения этого кода вычитает предыдущее, код на выходе блока 7 соответствует скорости хлыста. Далее этот код дифференцируется еще раз блоком 8, на выходе которого код в свою очередь соответствует ускорению, и подается на вход блока 10 определения максимального ускорения. Каждое значение ускорениязаписывается в промежуточный регистр 13 и с его выхода поступает на вход схемы 15 сравнения, на второй вход которой поступает код ускорения максимального за предыдущие циклы синхросерии, записанный в регистре 14. Если текущее значение ускорения больше чем записанное в регистре 14, то на выходе схемы 15 сравнения появляется единица, поступает на вход синхронизации регистра 14 и новое значение переписывается в регистр 14 вместо прежнего. Таким образом, в регистре 14 в конечном итоге будет записано максимальное значение ускорения за период разгона хлыста. После окончания разгона в регистре 11 будет записан .код, соответствующий значению установившейся скорости. Команда на запись будет подана, когда во всех разрядах на выходе блока8 будут нули, и на выходе схемы ИЛИ-НЕ 12 появится единица. Код установившейся скорости подачи с выхода блока 9, код максимального ускорения с выхода блока 10, как и коды с выходов регистров 17-20, подаются на соответствующие входы арифметического блока 21. Команда на его запуск подается при сформировании на выходе блока 9 ко;: установившейся скорости,так как все остальные входные факторы к этому моменту уже известны. При появлении на выходе регистра 11 кода на выходе схемыИЛИ 2 появится единица и сигналы синхросерии будут проходить через схему И 27 на входсинхронизации блока 21.При этом на выходе блока 21 формируется
код, соответствующий позиции, в которой необходимо подать команду на отключение привода и включение тормоза. Когда передний торец хлыста будет в заданной позиции, коды совпадут и на выходе схемы 22 появится сигнал, который подается на вход стоп блока 23 управления приводом. Двигатель привода отключается от сети, однорременно включается тормоз.
Блок 34 индикации выдает в милли0метрах данные о положении торца хлыста и о нижней и верхней границах зоны допуска. Возврат (или дотягивание) хлыста в пределы допуска по длине сортимента может осуществляться и в
5 автоматическом режиме. При заказе оператором длины в регистре 17 блока 16 на двух выходах регистра 33 появляются коды нижней и верхней границ зоны допуска по длине сортимента,
0 которые идут, как на индикаторы 36 и 37 так и на соответствующие, входы схем 31 и 32 совпадения. На вторые входы этих схем подается код. от датчика перемещения; выходы схем 31 и 32 а также выход блока 7 подключены ко
5 входам блока 30 коррекции, выходаа которого малая вперед} малая назад и надвигание соединены с соответствующими входами блока 23 управления приводом. В зависимости
0 от положения хлыста относительно , зоны допуска с учетом наличия движения И его направления появляется сигнал на одном из выходов блока 30, в соответствии с которым изменяется
5 режим работы привода.
При пересечении хлыстом верхней или нижней границы зоны допуска появляется сигнал на выходе блока 30 стоп с одновременны.- включением
0 тормоза. Команда на надвигание пилы . будет дана в том случае, если хлыст (его передний.торец) будетнаходиться в пределах зоны допуска и его скорость будет равна нулю. Одновремен5но будет дана команда на установку на нуль всех счетчиков и регистров схемы. Далее цикл повторяется.
В предлагаемом устройстве хлысты
0 будут проходить максимальную часть заданного перемещения с максимальной скоростью, т.е. в каждом цикле будет сформирована оптимальная фазовая траектория участка торможения,
5 следствием же будет повышение производительности. При этом, в отличие от известных устройств, гораздо точнее определяется точка отключения привода и начала торможения путем более точного определения сил инер0л,ии системы и определения, статического момента, причем для этого не требуется сложных и малонадежных устройств для измерения размеров хлыста.
5 Формула изобретения 1.Устройство управления пози- ционным приводом на раскряжевочных установках с продольной подачей, включающее датчик перемещения, выполненный в виде преобразователя перемещение-код и блок управления приводом, отличающееся тем, что, с целью повышения производительности раскряжевочной установки путем более точного определения начала торможения, устройство снабжено двумя последовательно соединенными дифференцирующими блоками, которые подключены к датчику перемещений,, блоком определения установившей ;я скорости, который подключен к выходгм дефференцирующих блоков:, блоком определения максимального ускоренная который подключен к выходу второго дефференцирующего блока, задатчиком схемой совпадения, которая соединена входом с датчиком перемещения, а а выходом - с входом блока управлени приводом, арифметическим блоком, ко входам которого подключены выходы з датчика, блока определения установив шейся скорости и блока определения максимального ускорения, а к выходу - второй вход схемы совпадения. 2.:Устройство по п. 1, отличающееся тем, что задатчик содержит регистры позиций останова,; момента двигателя , номийальной скорости привода и тормозного момента. 3,Устройство по.п. 1, отличающееся тем, что блок определения установившейся скорости содержит регистр установившейся скорости со входом синхронизации и элемент ИЛИ-НЕ, через который выход второго дифференцирующего блока подключен ко входу синхронизации регистра установившейся скорости. 4.Устройство по п. 1, отличающееся тем, что блок определения максимального ускорения содержит регистр максимального ускорения со входом синхронизации, промежуточный регистр и подключенную к их выходам схему сравнения, выход которой соединен с входом синхронизации регистра максимального ускорения, причем выходы обоих регистров подключены к выходу второго дифференцирующего блока. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 363582, кл. В 27 В 5/29, 1971. 2.Авторское свидетельство СССР № 634929, кл. В 27 В 27/00, 1977 (прототип,) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подачи и точного останова хлыстов на раскряжовочных установках | 1980 |
|
SU905070A1 |
| Устройство для отмера длин сортиментов при раскряжевке лесоматериалов | 1985 |
|
SU1341031A1 |
| Способ раскряжевки хлыстов на сортименты на установках с продольной подачей | 1980 |
|
SU1025324A3 |
| Устройство для подачи и точного останова лесоматериалов на раскряжевочных установках | 1986 |
|
SU1412949A1 |
| Способ раскряжевки лесоматериалов и раскряжевочная установка | 1987 |
|
SU1530444A1 |
| СПОСОБ ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2005591C1 |
| Устройство для продольной подачи хлыстов раскряжевочной установки | 1980 |
|
SU912493A1 |
| Раскряжевочная установка | 1989 |
|
SU1720858A1 |
| Линия для обработки лесоматериалов | 1982 |
|
SU1063602A1 |
| Привод механизма подачи хлыстов раскряжевочной установки | 1980 |
|
SU906689A1 |
. 79777 С
$1и
a(i)
k
