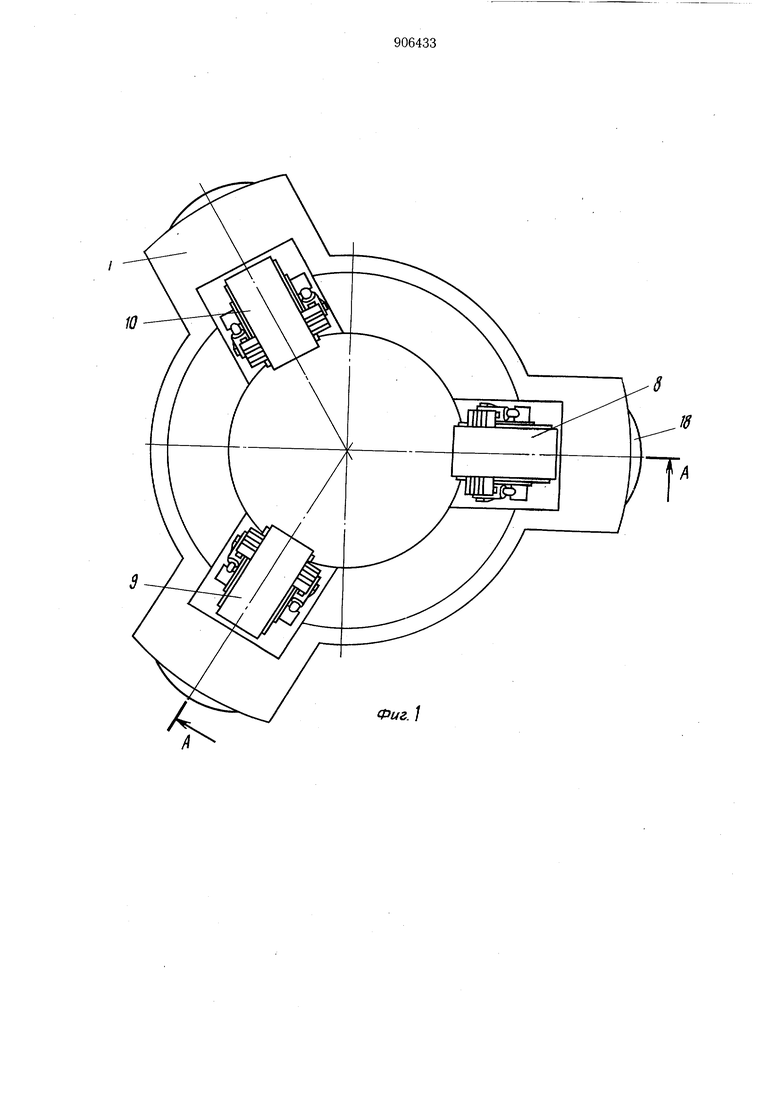
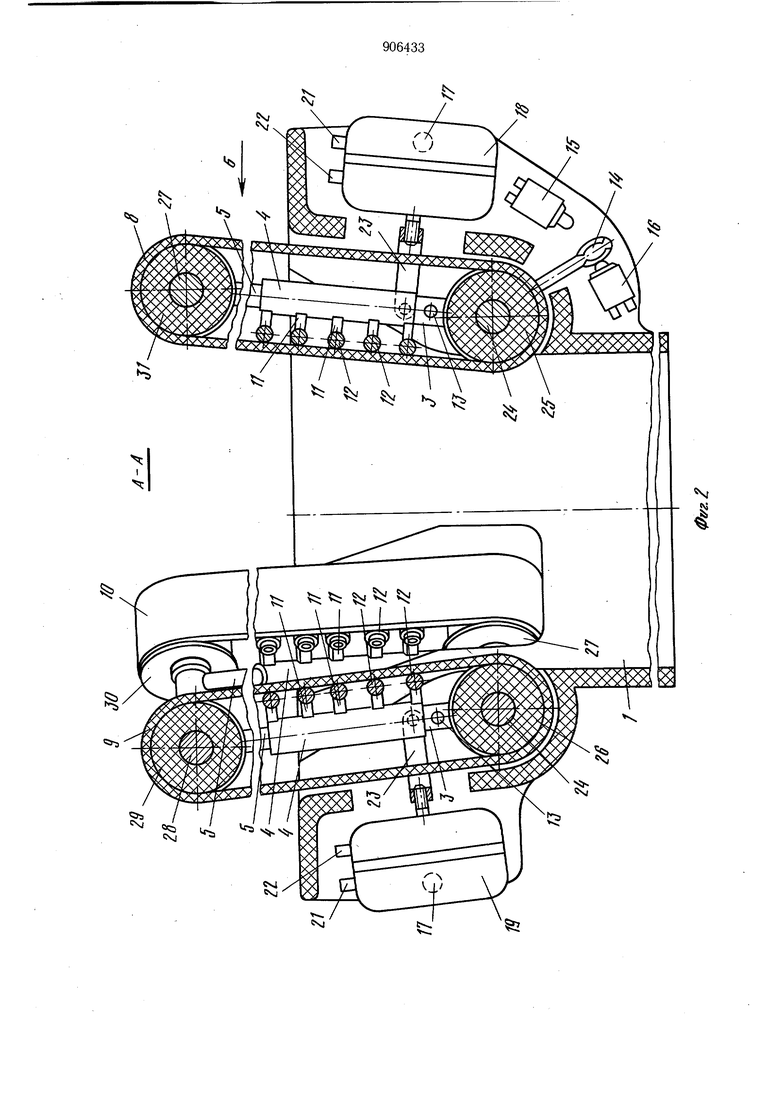
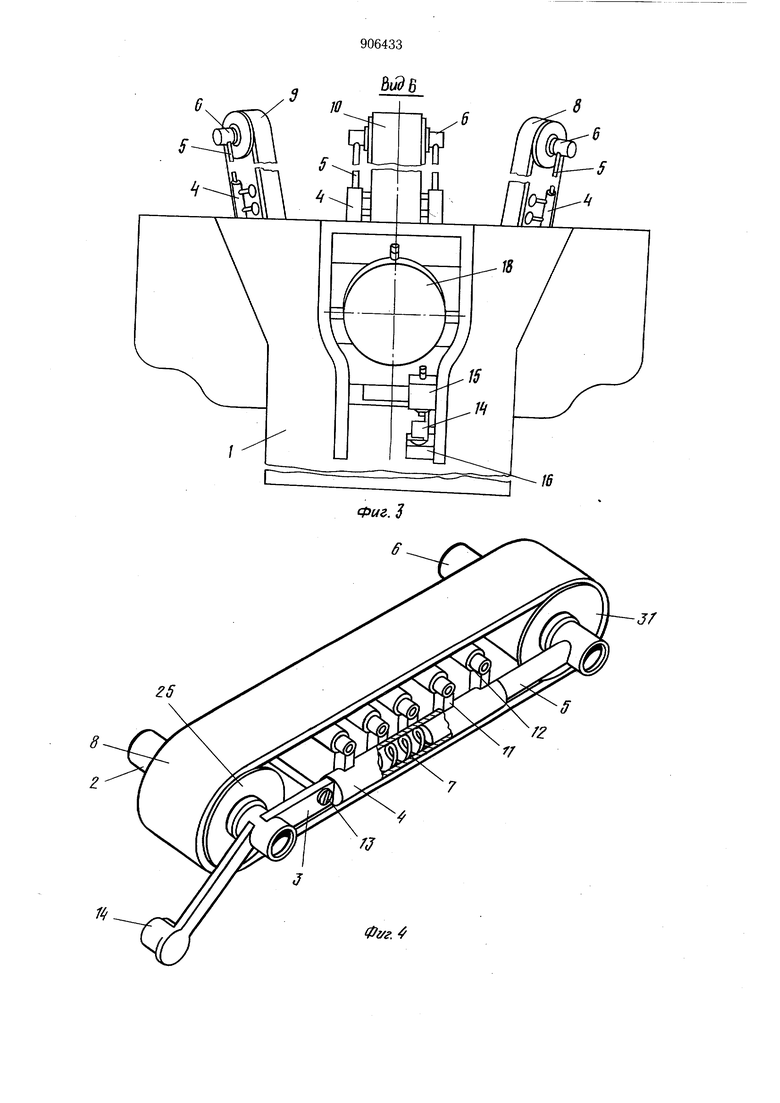
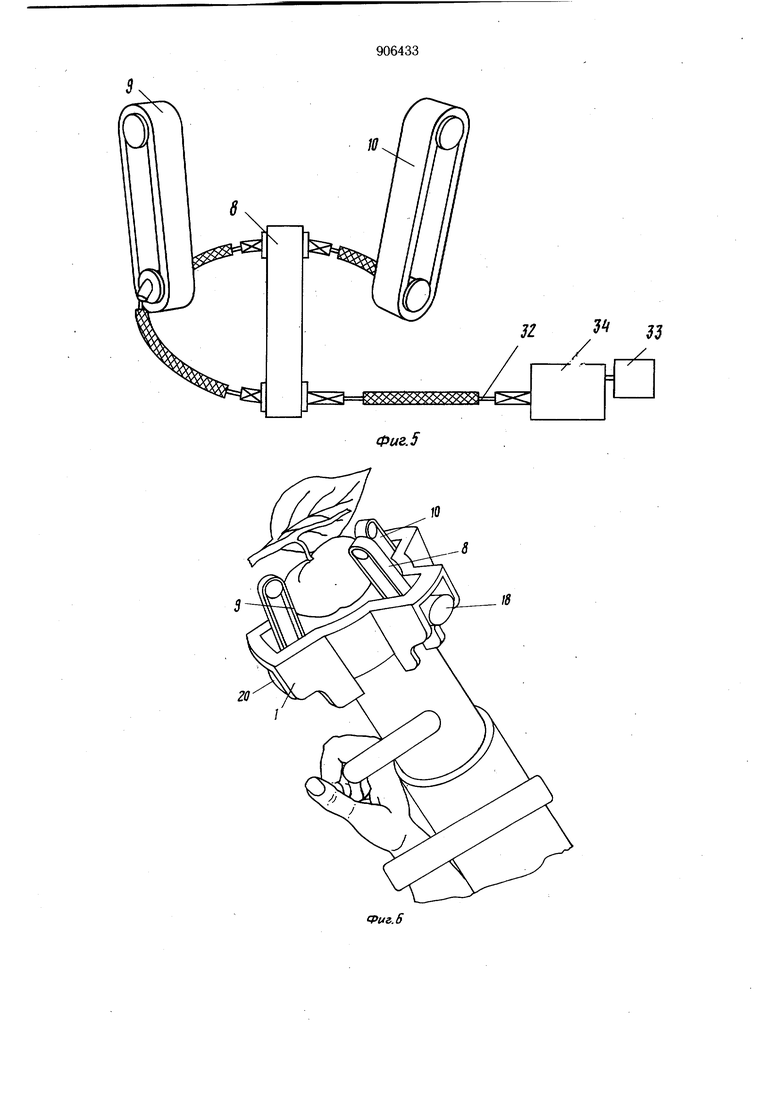
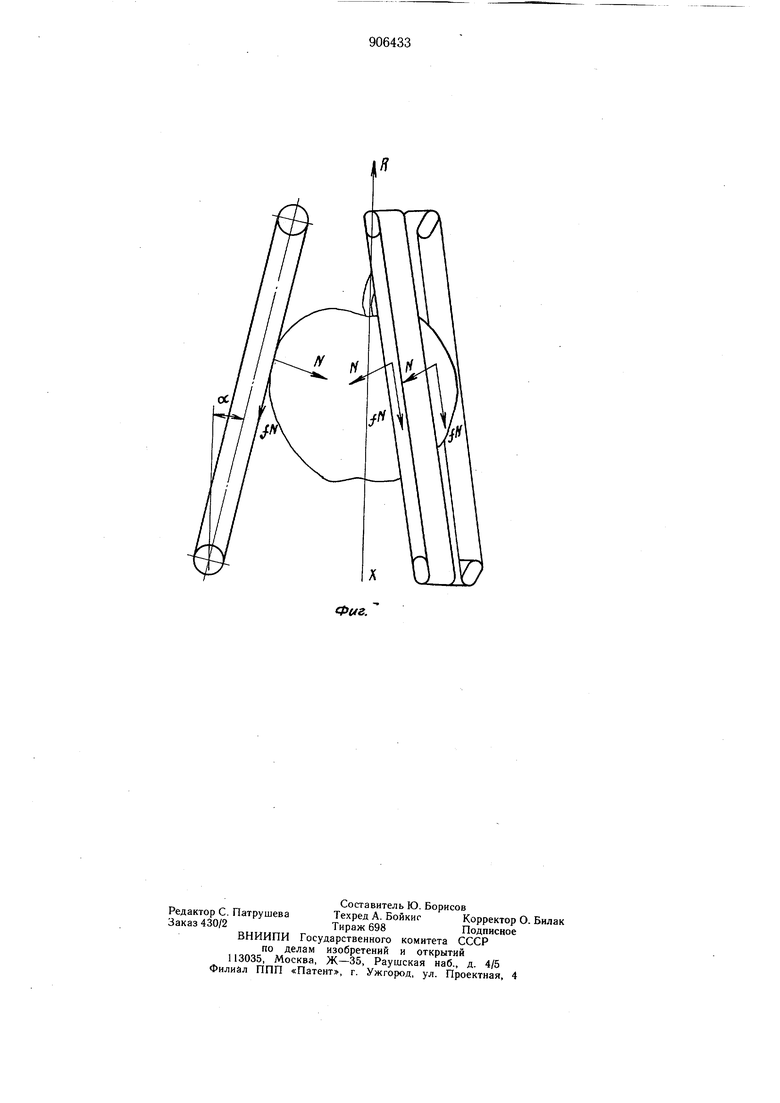
(54) УСТРОЙСТВО ДЛЯ СБОРА ПЛОДОВ Изобретение относится к сельскому хозяйству, а именно к устройствам для убор ки плодов путем механического воздействия на них. Известно устройство, выполненное в виде двух дугообразных стержней, которые поворачиваются на осях, закрепленных в корпусе устройства. Ось каждого стержня с одной стороны выполнена в виде кривошипа, который шарнирно посредством шатуна соединен с ползуном. Ползун может совершать возвратно-поступательное движение в направляюшей трубе. В движение ползун устройства приводится усилием руки человека, обслуживающего данное устройство. При перемещении ползуна движение шатуна передается кривошипам Дугообразных стержней. Они поворачиваются, бьют по плоду и обрывают его. Сорванный плод попадает в плодоулавливатель 1. Однако дугообразные стержни сильно повреждают плоды в результате того, что зона контакта между дугообразным стержнем и плодом малая, а динамическое усилие, -передаваемому плоду усиливает его повреждение. Кроме того, данное устройстВО малопроизводительно. Производительность снижается за счет того, что оно имеет большую массу и ручной привод. Известно также устройство для сбора плодов, содержащее корпус с установленными на нем захватывающими ленточными транспортерами, ведущие ролцки которых размещены на рамке и посредством гибкого вала связаны с механизмом привода, и плодоулавливатель 2. Недостатком данного устройства является, малая эффективность отрыва плодов от ветвей. Цель изобретения - повышение эффективности отрыва плодов от ветвей. Цель достигается тем, что каждый транспортер снабжен шарнирно прикрепленной к корпусу и соединенной с источником сжатого воздуха пневмокамерой с клапанами и размещенной в ней мембраной, соединенной посредством штока с рамкой транспортера, который посредством полуосей шарнирно установлен на корпусе, при этом одна из полуосей имеет переключатель, для контактирования с клапанами. С целью увеличения силы сцепления плода с лентой транспортера, ее поверхность выполнена рифленой, причем, с целью уменьшения усилия отрыва плода путем изгиба его плодоножки, ведущие ролики транспортеров имеют разный диаметр, а с целью уменьшения усилия отрыва плода путем скручивания его плодоножки, рабочая ветвь ленты каждого транспортера установлена под углом к плоскости, перпендикулярной плоскости его качания. На. фиг. 1 изображена горизонтальная проекция устройства для сбора плодов; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3- вил по стрелке Б на фиг. 2; на фиг. 4 - аксоно.метрия подвижного захвата устройства; на фиг. 5 - кинематическая схема устройства; на фиг. 6 - взаимодействие устройства и плода; на фиг. 7 - силы, действующие на плод. Устройство для сбора плодов состоит из трех захватных органов, соединенных с корпусо.м 1 устройства посредством полых полуосей 2, на которых захваты имеют возможность качаться. Составными частями захватов являются полуоси 2, которые посредством планок 3 соединены с трубчаты ми направляющими 4, в которые входят цилиндрические стержни 5, соединенные с гголыми полуосями 6 (фиг. 4). Внутри трубчатых направляющих 4 имеются пружины 7, обеспечивающие натяжение подвижных захватных лент 8-10. На трубчатых направляющих 4 закреплены опоры II под держивающих роликов 12, которые предупреждают прогибание лент 8-10 Планки 3 захватов соединены винтами 13 (фиг. 4) с целью увеличения жесткости конструкции захватов. На полуоси 2 одного из захватов закреплен переключатель 14, который во время качания захвата поочередно открывает пневматические клапаны 15 и.16 (фиг. 2). На полуосях 17, соединенных с корпусом 1 устройства, качаются пневматические камеры 18-20, которые посредством щтуцеров 21 и 22 соединены с системой питания сжатым воздухом. Штоки пневматических камер 18-20, соединены с дугообразными планками 23, шарнирно соединенными с трубчатыми направляющими 4 захватов. В полуоси 2 входят оси 24 ведущих роликов 25-27, а в полуоси 6 - оси 28 ведомых роликов 29-31. Крутящий момент на ведущие ролики 2527 передается гибким валом 32 от электродвигателя 33 через редуктор 34 (вместо электродвигателя 33 может быть использован вращательный пневмодвигатель). Устройство работает следую1яим образо.м. При подаче сжатого воздуха в штуцеры 21 пневматических камер 18-20 системой питания сжатым воздухом диафрагмы пневмокамер 18-20 прогибаются, и сила давления воздуха на диафрагмы посредством штоков пневмокамер 18-20 и дугообразных планок 23 передается на захваты и они начинают качаться на полых осях 2. Одновременно с подачей воздуха в штуцеры 21 пневматических камер 18-20 включается питание электродвигателя 33 (или же вращательного пневмодвигателя), и крутящий момент через редуктор 34 (фиг. 5) и гибкий вал 32 передается на оси 24 ведущих роликов 25-27. Ведущие ролики 25- 27 вращаются, приводя в движение ленты 8-10 захватов. Когда устройство подводится к плоду, захваты нажимают на плод, и он обрывается под действием силы, которая является результирующей нормального давления лент 8-10 захватов на плод, и сил трения, которые возникают между плодом и лентами 8-10 захватов. Захваты совершают вращательное движение до тех пор, пока переключатель 14 не откроет пневмоклапан 15. При открывании переключателем пневматического клапана 15 сжатый воздух подается в штуцера 22 пневмокамер 18-20, диафрагмы которых прогибаются и сила давления сжатого воздуха на диафрагмы посредством штоков пневмокамер 18-20 и дугообразных планок 23 передается на захваты и они начинают качаться в противоположном направлении. Качение будет происходить до тех пор, пока переключатель 14 не откроет пнев матический клапан 16. При открывании пнев; моклапана 16 сжатый воздух подается в штуцера 21 пневмокамер 18-20 и рабочий Устройства повторяется, Сорванные плоды попадают по трубопроводу в плодоулавливатель (не показан). Монтируется устройство на руке человека, убирающего плоды. Устройство для сбора плодов конструктивно выполнено таким образом, что угол J- (фиг. 7) между вертикалью и захватом в плоскости качания захвата в начальный момент нажатия захвата на п„1од наибольшего размера равен около,10°. При обрыве наибольшего плода нормальная сила N, с которой захват действует на плод, будет наибольшей. Значит режим работы устройства при обрыве наибольшего плода наиболее неблагоприятный и, если плоды наибольщего размера не будут повреждаться, то не будут повреждаться плоды и всех других размеров. Перспективность устройства заключается также в том, что силу давления захватов на плод можно уменьшить путем выполнения поверхностей лент волнистыми. В результате этого сила сцепления плода с лентой увеличивается, и соответственно уменьшается сила лаЁления захватов на плод.
Силы, дейстчующие на плод со стороны захватов, статического характера, то есть в любой момент времени до обрыва плода устанавливается равновесие между силами с которыми давят на плод, и силой связи плода с веткой. Если уменьшить связь плода с веткой, то соответственно уменьшится сила давления захватов на плод.
Сила отрыва плодоножки от ветки уменьшается при отклонении плодоножки от вертикали. В данном устройстве это достигается путем выполнения ведущих роликов 25- 27 разного диаметра. При этом угловые скорости роликов будут одинаковыми, но линейные скорости роликов и лент захватов различными. В результате этого на плодоножку плода во время обрыва действует растягивающая сила, направленная вдоль плодоножки, и изгибающий плодоножку момент (он же отклоняет плодоножку от вертикали).
Усилие отрыва плодоножки от вертикали уменьшается также в результате скручивания плодоножки. Это достигается путем установки захватов устройства под углом к вертикали в плоскости перпендикулярной плоскости качания захвата. В результате этого силы, возникающие при взаимодействии захватов и плода, будут создавать относительно вертикальной оси плода, направленной вдоль плодоножки по ходу роста, крутящий момент.
Использование изобретения позволит повысить эффективность отрыва плодов от ветвей.
Формула изобретения 1. Устройство для сбора плодов, содержащее корпус с устарновленными на нем
захватывающими ленточными транспортерами, ведущие ролики которых размещены на рамке и посредством гибкого вала связаны с механизмом привода, и плодоулавливатель, отличающееся тем, что, с целью
повышения эффективности отрыва плодов от ветвей, каждый транспортер снабжен тиарнирно прикрепленной к корпусу и соединённой с источником сжатого воздуха пневмокамёрой с клапанами и размещенной в ней мембраной, соединенной посредством
штока с рамкой транспортера, который посредством полуосей шарнирно установлен на корпусе, при этом одна из полуосей имеет переключатель для контактирования с клапанами.
2. Устройство по п. 1, отличающееся тем, что, с целью увеличения силы сцепления плода с лентой транспортера, ее повер.хность выполнена рифленой.
3.Устройство по п. 1, отличающееся тем, что, с целью уменьшения усилия отрыва плода путем изгиба его плодоножки, ведущие ролики транспортеров имеют разный диаметр.
4.Устройство по п. 1, отличающееся тем, что, с целью уменьщения усилия отрыва плода путем скручивания его плодоножки, рабочая ветвь ленты каждого транспортера установлена под углом к плоскости, перпендикулярной плоскости его качания.
30
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3668848, кл. А 01 G 19/08, 1968. 35 2. Патент США № 3161007, кл. 56-332, кл. 56-332, 1964.
«м
фуг,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РУЧНОГО СБОРА ПЛОДОВ С ДЕРЕВЬЕВ | 1999 |
|
RU2159533C1 |
| Устройство для сбора плодов | 1980 |
|
SU882471A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТРЫВА ПЛОДОВ С ДЕРЕВЬЕВ | 2000 |
|
RU2174298C1 |
| Устройство для сбора плодов | 1979 |
|
SU820721A1 |
| Машина для уборки овощей | 1984 |
|
SU1158078A1 |
| Устройство для транспортирования свежесформованных волокнистых материалов | 1989 |
|
SU1730232A1 |
| Устройство для подъема растений с плодами | 1977 |
|
SU680681A1 |
| УСТРОЙСТВО ДЛЯ БЕРЕЖНОГО СЪЕМА ПЛОДОВ С ДЕРЕВЬЕВ | 2007 |
|
RU2337520C1 |
| Фильтр-пресс для обезвоживания влажного растительного сырья | 1980 |
|
SU899080A1 |
| Переставитель стеклоизделий | 1956 |
|
SU109898A1 |
20
fO
IS
