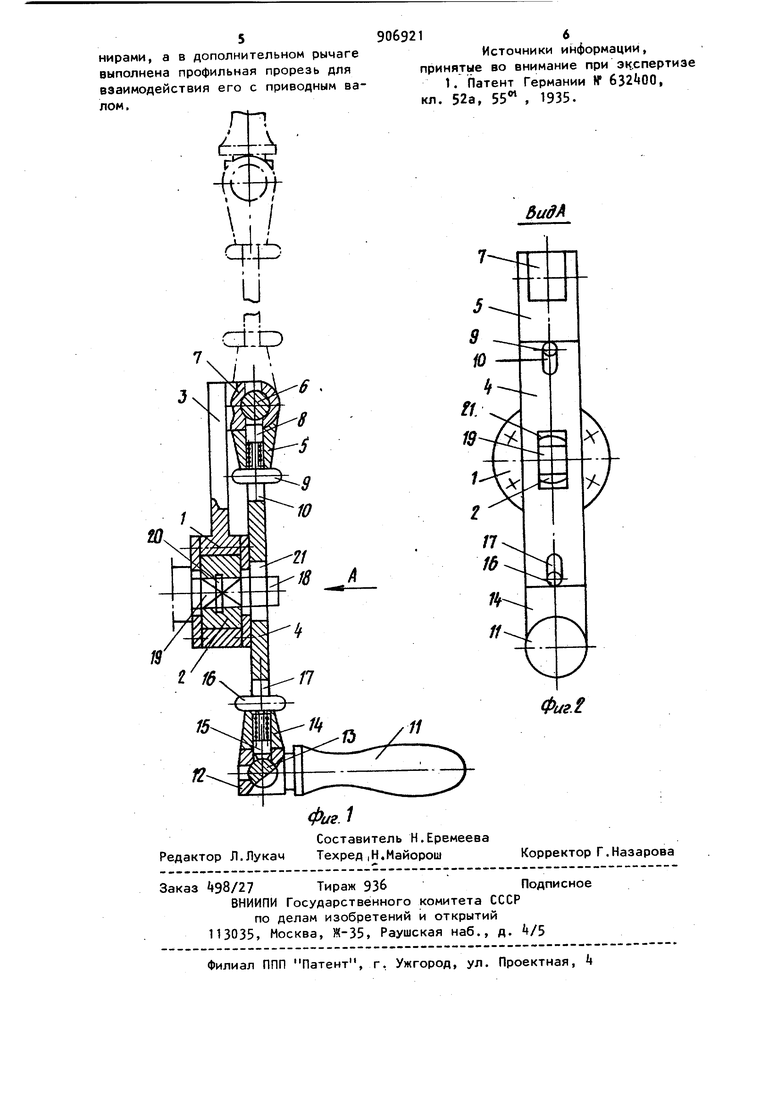
. Изобретение относится к устройст вам, применяемым для подъема различ ных грузов при монтажных, ремонтных и строительных работах. Известны приводные рукоятки грузоподъемных устройств, содержащие ступицу с основным рычагом, установ ленную на приводном валу, дополнительный рычаг,связанный одним конц при помощи расположенного в плоскос ти рукоятки шарнира с возможностью поворота на 180 с основным рычагом ручку, закрепленную посредством доп нительного шарнира на другом конце дополнительного рычага, и фиксатор положений основного рычага 1 . Недостатком известных устройств является невозможност ь работы рукояткой в стесненных условиях. Цель изобретения - расширение функциональных возможностей путем обеспечения работы в стесненных условиях. Поставленная цель достигается за счет того, что рукоятка снабжена дополнительным фиксатором положений ручки, установленной с возможностью поворота на 90° на дополнительном рычаге, причем оба фиксатора связаны с шарнирами, а в дополнительном рычаге выполнена профильная прорезь для взаимодействия его с приводным валом. На фиг. 1 изображена предлагаемая приводная рукоятка;на фиг. 2 - вид Л на фиг. 1. Приводная рукоятка содержит ступицу 1 с храповым механизмом 2, соединенный с ней основной рычаг 3 и шарнирно связанный с ним дополнительный рычаг 4,длина которого в два раза больше длины основного. Рукоятка при таком соотношении длин в сложенном виде принимает минимальные габариты, так как крайние ее точки находятся на одинаковом расстоянии от оси ступицы, а при вращении рукоятки они лежат на одной окружности. В этом слу39чае рукояткой можно работать как маховиком с ручкой. Шарнирное соединение рычагов выполнено следующим образом. На конце дополнительного рычага закреплена проушина 5, которая соединена осью 6 с бобышкой 7 основного рычага. Ось 6 расположена в плоскости вращения р коятки и перпендикуляр но оси ступицы 1. В проушину 5 вмонтирован подпружиненный фиксатор 8 с плечиками 9. Бобышка 7 имеет два радиальных отверстия для фиксатора 8, расположенных под углом 180° друг к другу. Плечики 9 имеют возможность поступательного перемещения в направ ляющей прорези 10 дополнительного ры чага, длина которой равна или несколько больше хода фиксатора. На противоположном конце дополнительного рычага посредством дополнительных шарнира и фиксатора закрепле на ручка IT. Установленная на ручке бобышка 12 имеет отверстие под ось 13, расположенную аналогично оси 6 и соединяющую ее с проушиной It, а также два радиальных отверстия под дополнительный фиксатор 15, расположенных под углом 90° друг к другу. Плечики 16 этого фиксатора расположены в направляющей прорези 17 Для соединения рукоятки с хвостовиком 18 приводного вала грузоподъем ного устройства в механизме 2 выполнено осевое квадратное отверстие 19 в проточкой 20, предназначенной для шарикового фиксатора, предусмотренного на хвостовике. Кроме того, на дополнительном рычаге а средней части выполнена профилированная прорезь 21, ширина которой ращна ширине отверстия 19. Длина прорези 21 больше ее ширины, что обеспечивает выход из нее хвостовика 18 при повороте до полнительного рычага вокруг оси б. При необходимости и возможности ускоренной работы грузоподъемного устройства, например при его настройке на исходную высоту, подводе под груз и опускании груза, рукоятку в сложенном виде устанавливают на хвостовик 18 приводного вала. В этом случае рукоятку вращают как маховичок. При этом крутящий момент от рукоятки на хвостовик 18 приводного вала устройства передают рычагом k посредством прорези 21. Механизм 2 в ступице не вступает в работу, и рабочее вращение рукоятки возможно в 4 обоих направлениях. За счет минимального радиуса окружности, по которой движется ручка 11, и соответственно малой величины пути, проходимого ею, возможно достижение высокой частоты вращения рукоятки. Следовательно, на указанных этапах работы возможно достижение максимальной производительности грузоподъемного устройства. Для перехода на режим подъема груза увеличивают длину рукоятки. С этой целью, нажимая на плечик 9 до упора в прорези 10, выводят фиксатор 8 из отверстия бобышки 7 и поворачивают рычаг на 180° вокруг оси 6. Под действием пружины фиксатор заходит в противоположное первому радиальное отверстие и фиксирует рычаг k в этом положении. Затем, нажав на плечик 16 фиксатора 15 поворачиваютручку 11 на 90° вокруг оси 13 и фиксируют ее в положении, в котором она является продолжением дополнительного рычага. В результате выполнения указанных операций длина рукоятки увеличивается более чем в три раза. Для подъема груза удлиненной рукояткой совершают колебательные (качающие) движения. Такое выполнение рукоятки позволяет повысить безопасность труда и обеспечить работу в стесненных условиях . Формула изобретения Приводная рукоятка грузоподъемного устройства, содержащая ступицу с основным рычагом, установленную на приводном валу грузоподъемного устройства, дополнительный рычаг, связанный одним концом при помощи расположенного в плоскости вращения рукоятки шарнира с возможностью поворота на 180 с основным рычагом, ручку, закрепленную посредством дополнительного рычага, и фиксатор положений основного рычага, отличающаяся тем, что, с целью расширения функциональных возмокностей путем обеспечения работы в стесненных условиях, она снабжена /дополнительным фиксатором положений ручки, установленной с возможностью поворота на 90 на дополнительном рычаге, . причем оба фиксатора связаны с шар- i
| название | год | авторы | номер документа |
|---|---|---|---|
| Рукоятка лебедки | 1988 |
|
SU1717528A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2015 |
|
RU2595204C1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2015 |
|
RU2578800C1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Ручной привод грузоподъемного устройства | 1982 |
|
SU1105450A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Захват-кантователь | 1987 |
|
SU1518270A1 |
| Ручная лебедка | 1979 |
|
SU793921A1 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
