Изобретение относится к грузоподъемным устройствам, а именно к ручным приводам лебедок.
Известен ручной привод грузоподъемного устройства, содержащий корпус, в котором смонтирован грузоупорный тормоз, включающий закрепленный на приводном валу винт и взаимодействующуюс винтом гайку, на которой смонтирована приводная рукоятка со ступицей, связанная с приводным валом посредством ограничителя грузоподъемности 1.
Однако в указанном приводе при выходе из строя грузоупорного тормоза может произойти падение груза, кроме того, ограничитель грузоподъемности выполнен в виде срезного щтифта, что также небезопасно, так как привод при перегрузке выходит из строя и опускание груза невозможно.
Целью изобретения является повышение безопасности.
Поставленная цель достигается тем, что в ручном приводе грузоподъемного устройства, содержащем корпус, в котором смонтирован грузоупорный тормоз, включающий закрепленный на приводном валу винт и взаимодействующую с винтом гайку, на которой смонтирована приводная рукоятка со ступицей, связанная с приводным валом посредством ограничителя грузоподъемности, на приводном валу жестко смонтирован диск с радиальными выступами, а в гайке выполнены пазы, щирина которых больше щирины выступов на величину рабочего поворота диска относительно гайки и в которых размещены указанные выступы, при этом ограничитель грузоподъемности включает фрикционное и промежуточное кольца, прижатые упругим элементом к ступице приводной рукоятки, а на промежуточном кольце выполнены щлицы, взаимодействующие с упомянутыми пазами гайки.
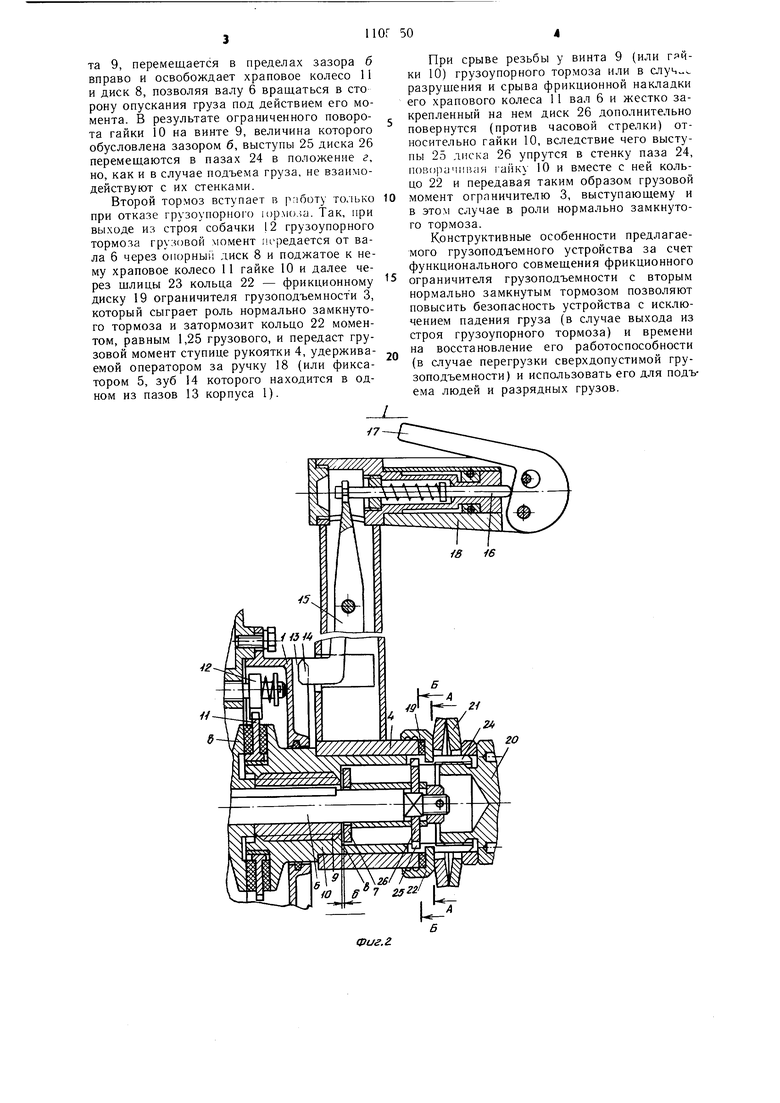
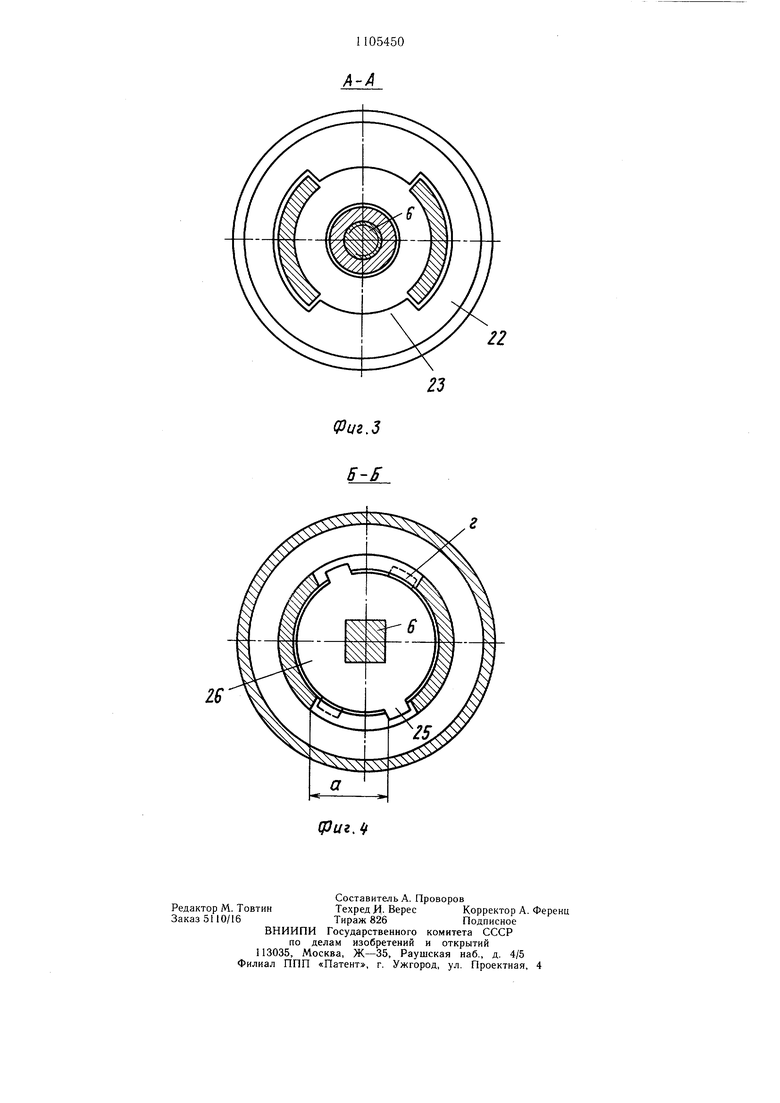
На фиг. 1 изображен привод грузоподъемного устройства, общий вид; на фиг. 2 - узел I на фиг. 1 (разрез по замкнутому грузоупорному тормозу, ограничителю грузоподъемности, второму тормозу и приводной рукоятке с нормально замкнуты.м фиксатором); на фиг. 3 - сечение А-А на фиг. 2 (по промежуточному кольцу ограничителя грузоподъемности); на фиг. 4 - сечение Б-Б на фиг. 2 (по диску второго тормоза).
Ручной привод грузоподъемного устройства состоит из корпуса 1, грузоупорного тормоза 2, фрикционого ограничит&тя грузоподъемности 3, приводной рукоятки 4 и нормально замкнутого фиксатора 5 рукоятки.
Грузоупорный тормоз размещен внутри корпуса 1 и состоит из свободно посаженной на приводной вал 6 (фиг. 2) упорной щайбы 7, жестко закрепленных на валу 6 опорного диска 8 и винта 9 с навинченной на его ходовую резьбу гайкой 10, свободно сидящего на бурте гайки храпового колеса 11
и стопорящей его собачки 12, закрепленной на корпусе.
В одном из торцовых пазов 13 корпуса 1 размещен зуб 14 нормально замкнутого фиксатора 5 приводной рукоятки, связанной посредством тяги-коромысла 15 и подпружиненного щтока 16 с нажимным поворотным рычагом 17, закрепленным на ручке 18.
Ограничитель грузоподъемности выполнен в виде фрикционного кольца 19, закрепленного на торце ступицы рукоятки 4 и поджатого регулировочным винтом 20 через упругий элемент 21 к промежуточному кольцу 22, которое своими щлицами 23 беззазорно входит в пазы 24, выполненные в удлиненной ступице гайки 10. В эти же пазы
входят радиальные выступы 25 жестко закрепленного на валу 6 диска 26, образующего, совместно с ограничителем грузоподъемности 3, второй отдельно действующий нормально замкнутый тормоз. Выступы 25
Q размещены в пазах 24 с зазором а, обеспечивающим свободный угловой поворот их в пазах, несколько больщий поворота гайки 10 на винте 9, обусловленного зазором б между торцом в гайки 10 и упорной щайбой 7. Ограничитель грузоподъемности 3 путем
поджатия упругого элемента 21 винтом 20 отрегулирован на передачу крутящего момента, равного 1,25 грузового момента.
Устройство работает следующим образом.
При подъеме груза, не превыщающего
0 грузоподъемности устройства, охватом рукой ручки 18 утапливают рычаг 17 в ручку (в результате чего зуб 14 фиксатора выходит из паза 13 корпуса) и вращают рукоятку 4 по часовой стрелке (см. со стороны ограничителя), передавая от нее крутящий
5 момент последовательно через фрикционный диск 19, поджатый к кольцу 22, щлицы 23 этого кольца - гайке 10 и далее через храповое колесо 11, зажатое между ее торцом и опорным диском 8, опорному диску 8 и жестко связанному с ним валу 6. При этом собачка 12 не препятствует вращению храпового колеса 11, а щлицы 25 диска 26 не касаются стенок паза 24 (см. фиг. 4) и не участвуют в передаче момента от гайки 10 валу 6.
5„
При попытке поднять груз, превыщающий более чем в 1,25 раза грузоподъемность устройства, фрикционный диск 19 ограничителя 3, поворачиваемый рукояткой 4, пробуксовывает по промежуточному кольцу 22,
0 в результате чего гайка 10 (а вместе с ней и приводной вал 6) остается неподвижной и, следовательно, груз не может быть поднят.
При опускании груза охватом рукой ручки 18 утапливают рычаг 17 в ручку и вра5 щают рукоятку 4 против часовой стрелки, передавая от нее крутящий момент через фрикционный диск 19, кольцо 22, его шлицы 23 гайке 10, которая, свинчиваясь с винта 9, перемещается в пределах зазора б вправо и освобождает храповое колесо 11 и диск 8, позволяя валу 6 вращаться в сто рону опускания груза под действием его момента. В результате ограниченного поворота гайки 10 на винте 9, величина которого обусловлена зазором б, выступы 25 диска 26 перемещаются в пазах 24 в положение г, но, как и в случае подъема груза, не взаимодействуют с их стенками.
Второй тормоз вступает в рпботу только при отказе грузоупорного юрмола. Так, при выходе из строя собачки 12 грузоупорного тормоза грузовой момент пл редается от вала б через oiiopHbiii диск 8 и поджатое к нему храповое колесо 11 гайке 10 и далее через щлицы 23 кольца 22 - фрикционному диску 19 ограничителя грузоподъемности 3, который сыграет роль нормально замкнутого тормоза и затормозит кольцо 22 моментом, равным 1,25 грузового, и передаст грузовой момент ступице рукоятки 4, удерживаемой оператором за ручку 18 (или фиксатором 5, зуб 14 которого находится в одном из пазов 13 корпуса 1).
При срыве резьбы у винта 9 (или гячки 10) грузоупорного тормоза или в случ, разрушения и срыва фрикционной накладки его храпового колеса 11 вал 6 и жестко закрепленный на нем диск 26 дополнительно повернутся (против часовой стрелки) относительно гайки 10, вследствие чего выступы 25 лиска 26 упрутся в стенку паза 24, поворачиная гайку 10 и вместе с ней кольцо 22 и передавая таким образом грузовой момент ограничителю 3, выступающему и в этом случае в роли нормально замкнутого тормоза.
Конструктивные особенности предлагаемого грузоподъемного устройства за счет функционального совмещения фрикционного ограничителя грузоподъемности с вторым нормально замкнутым тормозом позволяют повысить безопасность устройства с исключением падения груза (в случае выхода из строя грузоупорного тормоза) и времени на восстановление его работоспособности (в случае перегрузки сверхдопустимой грузоподъемности) и использовать его для подъема людей и разрядных грузов.
Л-4
Фиг.З В-Б
| название | год | авторы | номер документа |
|---|---|---|---|
| ТАЛЬ ДЛЯ ПОДЪЕМА ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2401243C1 |
| Грузоупорный тормоз для грузо-пОд'ЕМНыХ уСТРОйСТВ | 1977 |
|
SU835942A1 |
| Ручная лебедка | 1983 |
|
SU1320163A1 |
| Грузоупорный тормоз | 1972 |
|
SU449006A1 |
| Ручная лебедка | 1974 |
|
SU497213A2 |
| Грузоупорный тормоз | 1972 |
|
SU459425A1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2002 |
|
RU2208572C1 |
| Подъемник с ручным приводом | 1982 |
|
SU1062182A1 |
| ГРУЗОУПОРНЫЙ ТОРМОЗ | 1971 |
|
SU315687A1 |
| Грузоупорный тормоз | 1976 |
|
SU583089A1 |
РУЧНОЙ ПРИВОД ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА, содержащий корпус, в котором смонтирован грузоупорный тормоз, включающий в себя закрепленный на приводном валу винт и взаимодействующую с винтом гайку, на которой смонтирована приводная рукоятка .со ступицей, связанная с приводным валом посредством ограничителя грузоподъемности, отличающийся тем, что, с целью повышения безопасности, на приводном валу жестко смонтирован диск с радиальными выступами, а в гайке выполнены пазы, ширина которых больше ширины выступов на величину рабочего поворота диска относительно гайки и в которых размещены указанные выступы, при этом ограничитель грузоподъемности включает в себя фрикционное и промежуточное кольца, прижатые упругим элементом к ступице приводной рукоятки, а на промежуточном кольце выполнены шлицы, взаимодействующие с упомянутыми пазами гайки. (Л СП сл
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузоупорный тормоз для грузо-пОд'ЕМНыХ уСТРОйСТВ | 1977 |
|
SU835942A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
