(ЗА) ПОГРУЗОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочный манипулятор | 1979 |
|
SU852796A1 |
| Погрузочный манипулятор | 1984 |
|
SU1216148A1 |
| Устройство для управления доильным аппаратом | 1981 |
|
SU1186166A1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| ПНЕВМАТИЧЕСКИЙ ДОЗАТОР С ОТМЕРИВАНИЕМ ДОЗЫ ПО УРОВНЮ ЖИДКОСТИ В ТАРЕ | 2020 |
|
RU2754139C1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Преобразователь уровня | 1983 |
|
SU1129497A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| Пневматический течеискатель | 1984 |
|
SU1249360A1 |
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
Изобретение относится к технологиче;скому оборудованию, применяемому для механизации погрузочно-разгрузочных работ при обслуживании прессов и металлорежущих станков, при работе в складских помещениях, а также П-и - знспортировке, укладке и сняги : дс;клей с конвейера, в том числе д, выполнения аналоговых работ ч ..,.сг:;1ях повышенной взрыво- и по:;с;:;ос;па;;ности . -5йе.с1ен погрузочный манипулятор, юдеркащий выполненную в виде шарнирно о четырехзвенника стрелу, соединен ную со штоком цилиндра пневмопривода вертикального ее перемещения, и пневматическую систему управления, одержащую узел балансировки стрелы, наполненный с задатчиком давления и .. ОКОЙ ручного управления и механизм i-iaOopa давления, выполненный с аналогойыми элементами и включающий риру;:)щее звено, вход которого соединен с кнопкой набора давления, выходС КНОПКОЙ сброса давления, при этом в линии обратной связи установлен нормально открытый пневмоклапан,управляющим входом соединенный с кнопкой набора давления, выход сумматора посредством аналогового усилителя давления подключен к цилиндру пневмопривода, а первый вход - к задатчику давления 1 . Недостатком известного устройства является низкая производительность труда и неудобство эксплуатации. Целью изобретения является повышение производительности труда и удобства эксплуатации. Поставленная цель достигается тем, что механизм набора давления снабжен пневмоповторителем, а блок ручного управления - пневмотумблером, соединенным с пневмоповторителем, вход которого соединен с выходом интегрирующего звена,, а выход - со вторым входом сумматора.
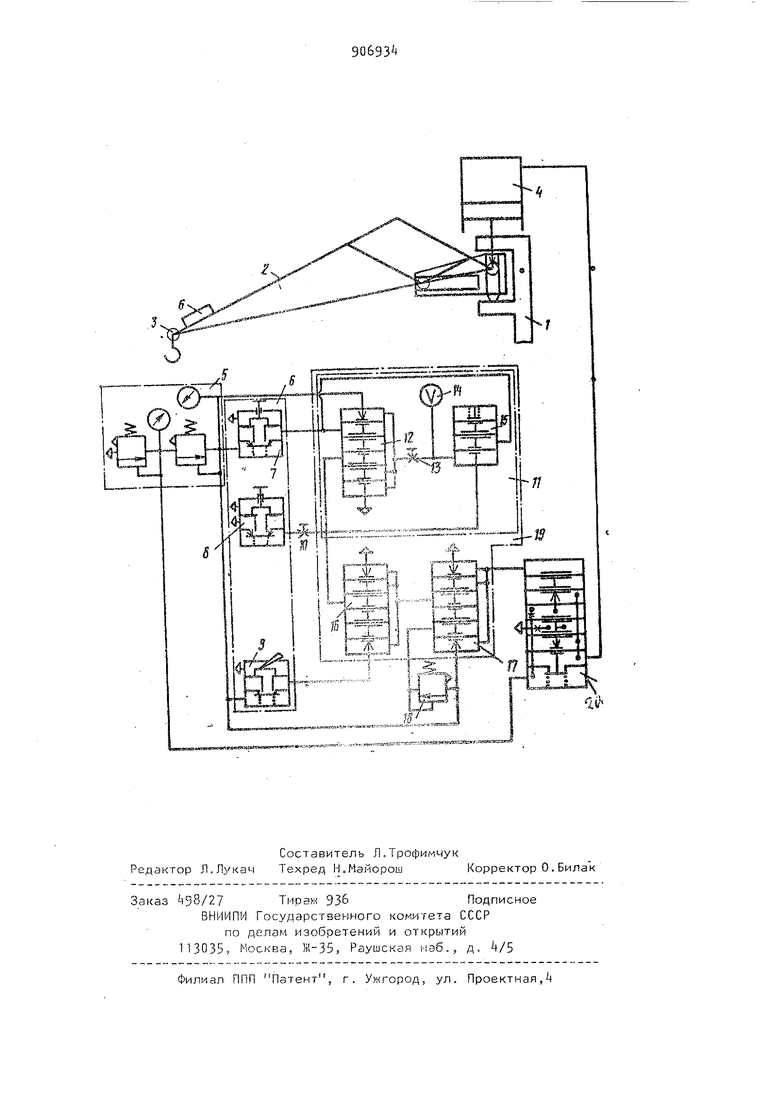
На чертеже изображена блок-схема манипулятора.
Манипулятор содержит основание 1, в направляющих которого перемещаются два ролика, оси которых совмещены с рабочими точками шарнирного четырехзвенного механизма пантографа-стрелы 2, в третьей рабочей точке механизма размещена ось 3 подвески кисты. Рабочая точка, совмещенная с осью ролика, установленного в вертикальных направляющих основания, механически связана со штоком цилиндра пневмопривода вертикального перемещения .Управление сбалансированным погрузочным манипулятором осуществляется пневматической системой управления, состоящей из источника 5 сжатрго воздуха, соединенного с блоком 6 ручного управления, расположенный на стреле 2, включающим в себя пневмокнопки 7 и 8 соответственно набора и сброса давления, а также пневмотумблер 9- Пневмокнопки 7 и 8 соединены соответственно со входом и через пневмосопротивление 10 - с выходом интегрирующего звена 11, включающего в себя сумматор 12, пневмосопротивление 13 пневмоемкость k и нормально разомкнутый пневмоклапан 15.
Выход интегрирующего звена П соединен со входом пневмоповторителя 16, питание на который поступает через пневмотумблер 9, а выход пневмоповторителя 16 соединен со вторым входом сумматора 17 первый вход которого соединен с выходом узла 18 балансировки стрелы, выполненного в виде задатчика давления. Интегрирующее звено 11, пневмоповторитель 16 и сумматор 17 составляют узел 19 набора давления и поддержания его величины, выход которого через усилитель 20 давления и мощности соединен с цилиндром k пневмопривода вертикального перемещения.
Манипулятор работает следующим образом.
После включения устройства питание от источника 5 сжатого воздуха поступает на усилитель 20 давления и мощности и на систему управления. При этом на выходе узла 18 балансировки стрелы устанавливается давление, обеспечивающее уравновешивание стрелы. Это давление с выхода узла 18 балансировки стрелы через сумматор 17 поступает на вход усилителя
20 давления и мощности, на выходе которого устанавливается пропорциональное входному сигналу высокое давление, уравновешивающее стрелу 2. Для транспортировки груза оператор подводит вручную стрелу к грузу, обеспечивает захват последнего, включает пневмотумблер 9 через который поступает питание на пневмоповторитель 16, и нажимает пневмокнопку 7 набора давления. При этом управляющее давление поступает на сумматор 12 интегрирующего звена 11 и на пиевмоклапан 15 замыкая обратную связь интегрирующего звена, в который установлены регулируемое пневмосопротивление 13 и пневмоемкость 14, определяющие постоянную времени интегрирования. Давление на выходе интегрирующего звена начинает линейно возрастать. Соответственно возрастает давление на входах пневмоповторителя 1б, сумматора 17 усилителя 20 давления и мощности и на выходе из него. Процесс продолжается до тех пор, пока на выходе усилителя 20 давления и мощности и в полости цилиндра k пневмопривода вертикального перемещения не установится давление, уравновешивающее поднимаемый груз. Как только груз оторвется от основания, пневмокнопка 7 набора давления отпускается. При это разрывается цепь обратной связи интегрирующего звена 11, и на соответствующих входах пневмоповторителя 1б сумматора 17 и усилителя 20 давления и мощности запоминается управляющее давление. На выходе усилителя 20 давления и мощности устанавливается давление, пропорциональное выходному сигналу сумматора 17, равному сумме выходных сигналов интегрирующего звена 11 и узла 18 балансировки стрелы, обеспечивающее уравновешивание груза. Далее оператор производит необходимые манипуляции с грузом при этом постоянство давления в цилиндре Ц пневмопривода обеспечивается усилителем 20 давления и мощности Если оператор работает с грузом одинакового веса, то после окончания транспортировки очередного груза ему необходимо переключить пневмотумблер 9. В результате снимается давление питания с пневмоповторителя 16, его выход принимает нулевое значение, но в его камере управления запирается давление, равное давлению выхода
5ЭО
интегрирующего звена 11. Для обеспечения плавности отключения пневмоповторителя 1б атмосферный канал пневмотумблера 9 может быть задросселирован (на чертеже дроссель не показан). На выходе сумматора 17, а следовательно и на выходе усилителя 20 давления и мощности остается давление, .компенсирующее вес стрелы.
После освобождения захвата манипулятора оператору необходимо подвести стрелу к очередному грузу, обеспечить его захват и включить пневмотумблер 9. При этом соответствующее давление управления поступает на входы сумматора 17 и усилителя 20 давления и мощности, на выходе которого сразу же устанавливается давление, уравновешивающее транспортируемый груз.
При работе же с грузами различной массы оператору необходимо после транспортировки очередного груза нажать пневмокнопку 8 сброса давления, при этом давление, обеспечивающее уравновешивание груза и запертое на входах пневмоповторителя 16 и сумматора 17 сбрасывается в атмосферу через пневмосопротивление 10, обеспечивающее необходимую скорость сброса. На выходе усилителя 20 давления и мощности остается давление, соответствующее весу стрелы. После освобождения захвата манипулятор готов к следующему циклу.
Применение предлагаемого погрузочного манипулятора позволяет повысить производительность труда на 70 за счет сокращения времени, необходимого на набор (интегрирование) давления для уравновешивания грузов одинакового веса. Тот факт, что при работе с грузами одинакового веса оператору при транспортировке каждого груза не надо следить за моментом отрыва груза от основакия, позволяет повысить удобство эксплуатации .
Формула изобретения
Погрузочный манипулятор, содер«ащий выполненную в виде шарнирного иетырехзвенника стрелу, соединенную :о штоком цилиндра пневмопривода ее вертикального перемещения, и пневматическую систему управления, содержащую механизм балансировки стрелы, выполненный с задатчиком давления и блоком ручного управления и механизм набора давления, выполненный с аналоговыми элементами и включающий интегрирующее звено, вход которого соединен с кнопкой набора давления, а выход - с кнопкой сброса давления, при этом в линии обратной связи установлен нормально открытый пневмоклапан, управляющим входом соединенный с кнопкой набора давления, выход сумматора посредством а налогового усилителя давления подключен к цилиндру пневмопривода, а первый вход - к задатчику давления, отличающийся тем, что,с целью повышения производительности труда, механизм набора давления снабжен пневмоповторителем, блок ручного управления - пневмотумблером, соединенным с пневмоповторителем, вход которого соединен с выходом интегрирующего звена, а выход - со вторым входом сумматора.
Источники информации, принятые во внимание при экспертизе
