Изобретение относится к оборудованию, применяемому для приема наработанных паковок с машин формования химических нитей и перегрузки их на транспортное средство, а также для механизации по- грузочно-разгрузочных работ при обслуживании прессов, металлорежущих станков, конвейеров, а частности к погрузочным манипуляторам.
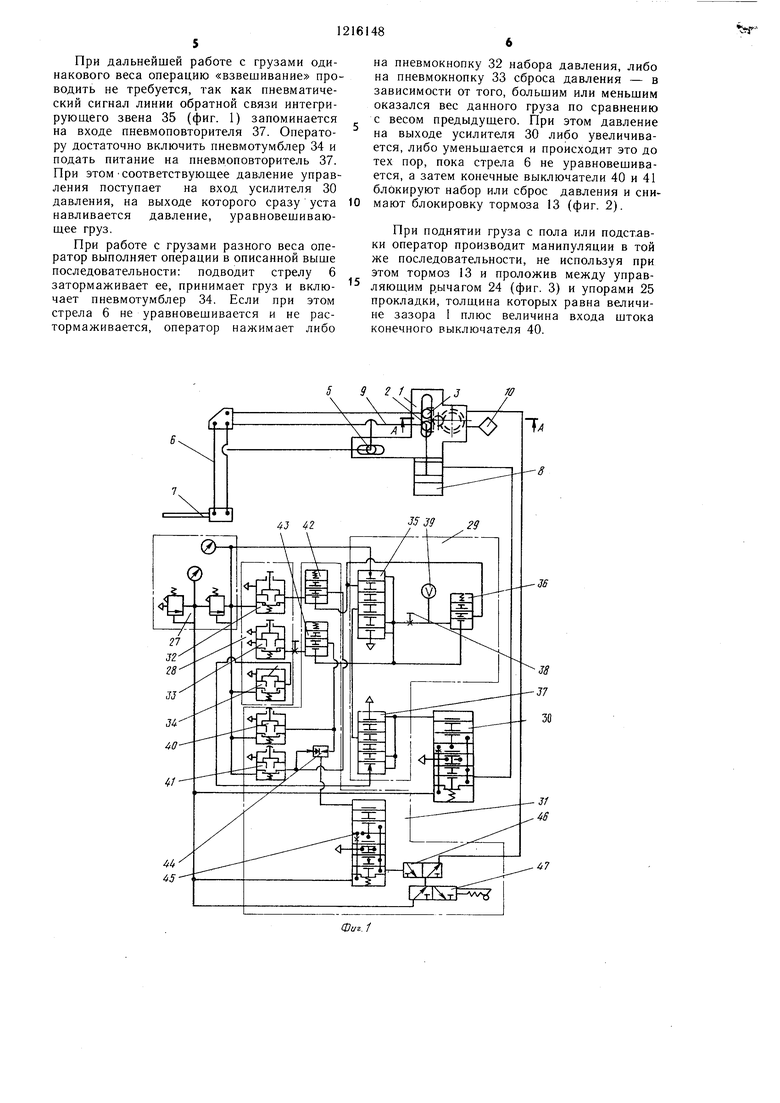
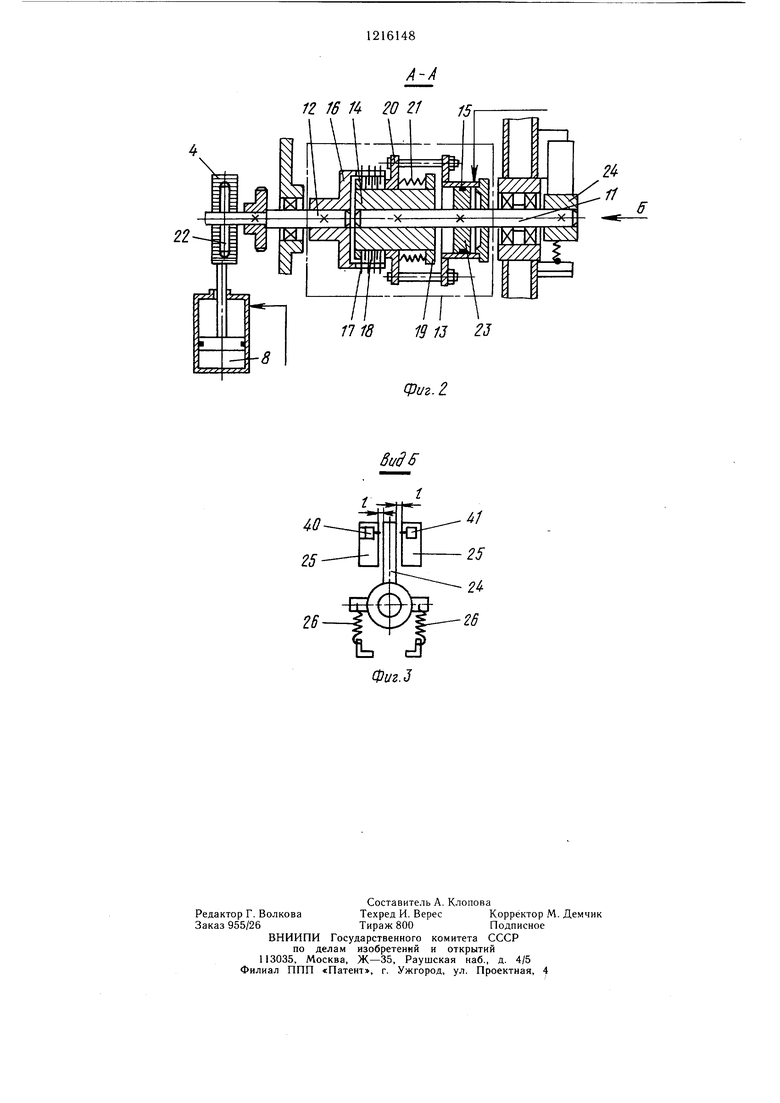
Цель изобрет е1|ия - расширение техно- Логических возможностей. На фиг. 1 Ьхематично изображен погрузочный манипулятор; на фиг. 2 - разрез А-А на фиг.. J (тормоз вертикального перемещения грузовой стрелы); на фиг. 3 - вид Б на фиг. 2 (на управляющий рычаг и упоры стойки).
Манипулятор содержит стойку 1, в вертикальном пазу которой установлены ролики 2 и 3, связанные рейкой 4, а в горизонтальном пазу установлен ролик 5. Оси роликов 2 и 5 совмещены с рабочими точками шарнирного механизма пантографа 6, в третьей рабочей точке которого установлен грузозахватный орган - паковкодержатель 7. На стойке 1 закреплен пневмоцилиндр 8 привода вертикального перемещения пантопневмоклапана 42 и 43, элемент 44 последовательности аналоговый усилитель 45 давления, пневмораспределитель 46 с пневмоуправ лением и пневмораспределитель 47 с ручным управлением. Вход пневмоклапана 42 соеди
5 нен с пневмокнопкой 32, выход - с входом интегрирующего звена 35, а управляющий вход - с конечным выключателем 41. Вход пневмоклапана 43 соединен с пневмокнопкой 33, выход - с линией обратной
10 связи интегрирующего звена 35, а управляющий вход - с конечным выключателем 40. Вход пневмоклапана 36 соединен через пневмоемкость 39 и пневмосопротив- ление 38 с выходом интегрирующего звена 35, а выход - с линией обратной связи
5 интегрирующего звена 35, а управляющий вход - с выходом пневмоклапана 42. Вход пневмоповторителя 37 связан с линией обратной связи интегрирующего звена 35, выход - с аналоговым усилителем 30 давления, а питающий вход - с пневмо- тумблером 34. Выход аналогового усилителя 30 соединен с полостью пневмоци- линдра 8. Кроме того, конечные выключатели 40 и 41 через элемент 44 последовательности соединены с аналоговым усили20
графа-стрелы 6, связанный через ролик 225 телем 45 давления, выход которого соедис его ведущим звеном 9. На звене 9 установ-йен с входом пневмоуправления пневмораслен противовес 10.пределителя 46. Выход пневмораспределиВ опорах стойки 1 соосно установленытеля 46 соединен с пневмоцилиндром 15,
валы 11 и 12 (фиг. 2), на которых закреплен тормоз 13 вертикального перемещения
стрелы 6, выполненный, например, в виде сжатого воздуха.
а питающий вход - с пневмораспредели- телем 47, который связан с источником 27
многодисковой муфты 14, пневмоцилиндра 15, закрепленных на валу И, и поводка 16, закрепленного на валу 12. На муфте 14 смонтированы наружные и внутренние диски 17 и 18, упорное и нажимное кольцо 19 и 20, пружины 21. Вал 12 посредством механической передачи 22, например зубчатой, связан с рейкой 4. На валу 11 закреплен поршень 23 пневмоцилиндра 15 и управляющий рычаг 24, который установлен с за35
Манипулятор работает следующим образом.
Питание от источника 27 сжатого воздуха поступает на усилители 30 и 45 давления, на пневмораспределитель 47 с ручным управлением и на систему управления. Грузовую стрелу 6 уравновещивают перемещением противовеса 10 и закреплением его в нужной точке. Для приема .
например паковки, оператор вручную подзором I между упорами 25 стойки 1. С уп- 40 водит стрелу 6, устанавливая ее в простран- равляющим рычагом связаны пружины 26, стве соосно паковке, переключает вручную
пневмораспределитель 47 в положение «Тормоз, отсекая подачу воздуха в пневмораспределитель 46 и далее в пневмоцилиндр 15 (фиг. 2). Сжатый воздух из полости
ного управления, установленный на стреле пневмоцилиндра 15 стравливается в атмо- 6, блок 29 набора давления, аналоговый сферу, пружины 21, опираясь на упорный
диск 19, сдвигают нажимной диск 20 вдоль оси вала 11. Диск 20 сжимает пакет наружных и внутренних дисков 17 и 18, создазакрепленные на стойке 1.
Манипулятор содержит также пневматическую систему управления, включающую источник 27 сжатого воздуха, блок 28 ручусилитель 30 давления и блок 31 управления тормозом. Блок 28 ручного управления включает пневмокнопку 32 набора давления.
пневмокнопку 33 сброса давления, пневмо- вая между ними момент трения, пропорциотумблер 34. Блок 29 набора давления содер-
жит интегрирующее звено 35, нормально закрытый пневмоклапан 36, пневмоповтори- тель 37, пневмосопротивление 38 и пневмоемкость 39. Блок 31 управления тормозом включает два конечных выключателя 40 и 41, смонтированных на упорах 25 и своими штоками контактирующих с управляющим рычагом 24, два нормально закрытых
нальный габаритам дисков и их количеству, а также усилию прижима, развиваемому пр ужинами 21. Валы 11 и 12 оказываются как бы замкнутыми через муфту 14, диски 17 и 18 и поводок 16. При переходе паков- 55 ки на паковкодержатель 7 (фиг. 1) нагрузка на стрелу 6 резко возрастает и стрела стремится опуститься вниз, повернувщись против часовой стрелки вокруг ролика 5. При
пневмоклапана 42 и 43, элемент 44 последовательности аналоговый усилитель 45 давления, пневмораспределитель 46 с пневмоуправ лением и пневмораспределитель 47 с ручным управлением. Вход пневмоклапана 42 соеди
нен с пневмокнопкой 32, выход - с входом интегрирующего звена 35, а управляющий вход - с конечным выключателем 41. Вход пневмоклапана 43 соединен с пневмокнопкой 33, выход - с линией обратной
связи интегрирующего звена 35, а управляющий вход - с конечным выключателем 40. Вход пневмоклапана 36 соединен через пневмоемкость 39 и пневмосопротив- ление 38 с выходом интегрирующего звена 35, а выход - с линией обратной связи
интегрирующего звена 35, а управляющий вход - с выходом пневмоклапана 42. Вход пневмоповторителя 37 связан с линией обратной связи интегрирующего звена 35, выход - с аналоговым усилителем 30 давления, а питающий вход - с пневмо- тумблером 34. Выход аналогового усилителя 30 соединен с полостью пневмоци- линдра 8. Кроме того, конечные выключатели 40 и 41 через элемент 44 последовательности соединены с аналоговым усили
телем 45 давления, выход которого соедисжатого воздуха.
а питающий вход - с пневмораспредели- телем 47, который связан с источником 27
сжатого воздуха.
Манипулятор работает следующим образом.
Питание от источника 27 сжатого возуха поступает на усилители 30 и 45 давления, на пневмораспределитель 47 с ручным управлением и на систему управления. Грузовую стрелу 6 уравновещивают перемещением противовеса 10 и закреплением его в нужной точке. Для приема .
вая между ними момент трения, пропорцио
нальный габаритам дисков и их количеству, а также усилию прижима, развиваемому пр ужинами 21. Валы 11 и 12 оказываются как бы замкнутыми через муфту 14, диски 17 и 18 и поводок 16. При переходе паков- ки на паковкодержатель 7 (фиг. 1) нагрузка на стрелу 6 резко возрастает и стрела стремится опуститься вниз, повернувщись против часовой стрелки вокруг ролика 5. При
этом ролик 2 поднимается в вертикальном пазу стойки 1 вместе с рейкой 4 (фиг. 2). Рейка 4 через передачу 22 поворачивает вал 11 и закрепленный на нем управляющий рычаг 24, который при выключенном тормозе 13 удерживается в нейтральном положении усилием пружин 26 (фиг. 3). Поворот рычага 24 продолжается до взаимодействия с упором 25, т. е. пока не выберется зазор 1. Одновременно с касанием
по линии обратной связи на вход пневмо- повторителя 37, запоминается им.
Одновременно прекращается подача пнев- мосигнала на усилитель 45 и пневморас- пределитель 46 открывается. При переключе 5 НИИ пневмораспределителя 47 в положение «Расторможено воздух через пневмораспре- делитель 46 поступает в пневмоцилиндр 15 (фиг. 2), который перемещается, сжимает пружины 21 и размыкает диски 17 и 18.
упора 25 (фиг. 3) рычаг 24 нажимает на Q Далее оператор производит необходимые шток конечного выключателя 41 (фиг. 1), который выдает пневматический сигнал на управляющий вход нормально закрытого пнев- моклапана 42, открывая его, и на вход аналогового усилителя 45 давления, который
манипуляции со стрелой 6, перемещая ее в позицию перегрузки паковки, при этом постоянство давления в пневмоцилиндре 8 (фиг. 1) обеспечивается усилителем 30 давления.
на выходе формирует пневмосигнал, посту- 15
При перегрузке паковки с паковкодер- жателя 7 оператор устанавливает стрелу 6 в необходи.мое пространственное положение и переключает Пневмораспределитель 47 в положение «Тормоз, фиксируя положение стрелы 6. Паковку удаляют с паковко- держателя 7, при этом нагрузка на стрелу 6 становится нулевой, и стрела 6 под действием усилия, развиваемого пневмоцилинд- ром 8, стремится подняться вверх, повернувшись вокруг ролика 5 по часовой стрелке. Управляющий упор 24 (фиг. 3) поворачивается, выбирает зазор I, взаимодействует с упором 25 и воздействует на шток конечного выключателя 40. Пневматический сигнал от конечного выключателя 40 поступает на управляющий вход пневмоклапана 43 (фиг. 1), открывает пневмоклапан 43, который соединяет пневмокнопку 33 сброса давления с линией обратной связи интегрирующего звена.
пающии на управляющий вход пневмораспределителя 46. Пневмораспределитель 46 закрывается и отсекает прохождение сжатого воздуха в полость пневмоцилиндра 15 (фиг. 2), т, е. блокирует тормоз 13. В этот момент паковка уже висит на стреле 6 (фиг. 1). но еще не уравновещена усилием пневмоцилиндра 8. Теперь при случайном ручном переключении пневмораспределителя 47 в положение «Расторможено, сжатый воздух не сможет попасть в полость пневмоцилиндра 15 (фиг. 2), размыкающего диска 17 и 18 из-за того, что перекрыт пнев- мораспределитель 46 (фиг. I). Затем оператор производит операцию «взвешивания паковки для чего нажимает пневмокнопку 32 набора давления, и пневмосигнал через пневмоклапан 42, который в данный момент открыт управляющим сигналом от конечного выключателя 41, поступает на вход интегрирующего звена 35 и параллельно на управляющий вход пневмоклапана 36, который также открывается и открывает линию обратной связи интегрирующего звена 35. Пневмосопротивление 38 и пневмоемкость 39 определяют постоянную времени интегрирования. Давление на выходе интегрирующего звена 35 начинает линейно возрастать. Соответственно возрастает давление на пневмоповторителе 37, усилителе 30 давления и на выходе из него. Процесс продолжается до тех пор, пока на .выходе усилителя 30 и, соответственно, в полости пневмоцилиндра 8 не установится давление, уравновещивающее паковку. Как только это произойдет, стрела 6 с паковкой приподнимется, управляющий рычаг (фиг. 2, 3) отбйдет от упора 25 и освободит щток конечного выключателя 41, который прекратить подачу пневмосигнала на управляющий вход пневмоклапана 42 (фиг. 1) и на усилитель 45. Пневмоклапан 42 размыкается и прерывает связь пневмокнопки 32 набора давления с интегрирующим звеном 35 и пневмоклапаном 36.
Последний размыкается и запирает линию обратной связи интегрирующего звена 35. Пневматический сигнал, поступающий
по линии обратной связи на вход пневмо- повторителя 37, запоминается им.
Одновременно прекращается подача пнев- мосигнала на усилитель 45 и пневморас- пределитель 46 открывается. При переключе НИИ пневмораспределителя 47 в положение «Расторможено воздух через пневмораспре- делитель 46 поступает в пневмоцилиндр 15 (фиг. 2), который перемещается, сжимает пружины 21 и размыкает диски 17 и 18.
Далее оператор производит необходимые
Далее оператор производит необходимые
манипуляции со стрелой 6, перемещая ее в позицию перегрузки паковки, при этом постоянство давления в пневмоцилиндре 8 (фиг. 1) обеспечивается усилителем 30 давления.
5
0
5
0
5
При перегрузке паковки с паковкодер- жателя 7 оператор устанавливает стрелу 6 в необходи.мое пространственное положение и переключает Пневмораспределитель 47 в положение «Тормоз, фиксируя положение стрелы 6. Паковку удаляют с паковко- держателя 7, при этом нагрузка на стрелу 6 становится нулевой, и стрела 6 под действием усилия, развиваемого пневмоцилинд- ром 8, стремится подняться вверх, повернувшись вокруг ролика 5 по часовой стрелке. Управляющий упор 24 (фиг. 3) поворачивается, выбирает зазор I, взаимодействует с упором 25 и воздействует на шток конечного выключателя 40. Пневматический сигнал от конечного выключателя 40 поступает на управляющий вход пневмоклапана 43 (фиг. 1), открывает пневмоклапан 43, который соединяет пневмокнопку 33 сброса давления с линией обратной связи интегрирующего звена.
Одновременно пневмосигнал от конечного выключателя 40 поступает на усилитель 45, который перекрывает Пневмораспределитель 46 и блокирует несвоевременное отключение тормоза 13. Затем для снятия давления из полости пневмоцилиндра 8 опера0 тор выключает пневмотумблер 34, тем самым снимая давление питания с пневмоповто- рителя 37. Соответственно, снимается давление с входа и выхода усилителя 30, воздух из полости пневмоцилиндра 8 стравливается в атмосферу. Стрела 6 остается в уравновешенном состоянии только под действием противовеса 10. Пружина 26 (фиг. 3) возращает управляющий рычаг 24 в нейтральное положение, при этом стрела 6 (фиг. 1) слега опускается. Шток конечного выключателя 40 освобождается, прерывается пневмосигнал на пневмоклапан 43 и усилите ть 45, нневмораспределитель 46 открывается. Оператор переключает Пневмораспределитель 47 в положение «Расторможено, воздух поступает в пневмоцилиндр
5 15 (фиг. 2), который размыкает диски 17 и 18 тормоза 13.
Манипулятор готов для дальнейших операций.
5
0
При дальнейшей работе с грузами оди- иакового веса операцию «взвешивание проводить не требуется, так как пневматический сигнал линии обратной связи интегрирующего звена 35 (фиг. 1) запоминается на входе пневмоповторителя 37. Оператору достаточно включить пневмотумблер 34 и подать питание на пневмоповторитель 37. При этом Соответствующее давление управления поступает на вход усилителя 30 давления, на выходе которого сразу уста навливается давление, уравновешивающее груз.
При работе с грузами разного веса оператор выполняет операции в описанной выше последовательности: подводит стрелу 6 затормаживает ее, принимает груз и включает пневмотумблер 34. Если при этом стрела 6 не уравновешивается и не растормаживается, оператор нажимает либо
на пневмокнопку 32 набора давления, либо на пневмокнопку 33 сброса давления - в зависимости от того, большим или меньшим оказался вес данного груза по сравнению
2 с весом предыдущего. При этом давление на выходе усилителя 30 либо увеличивается, либо уменьшается и происходит это до тех пор, пока стрела 6 не уравновешивается, а затем конечные выключатели 40 и 41 блокируют набор или сброс давления и сни10 мают блокировку тормоза 13 (фиг. 2).
При поднятии груза с пола или подставки оператор производит манипуляции в той же последовательности, не используя при этом тормоз 13 и проложив между управ- ляющим р.ычагом 24 (фиг. 3) и упорами 25 прокладки, толщина которых равна величине зазора 1 плюс величина входа штока конечного выключателя 40.
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
| Погрузочный манипулятор | 1979 |
|
SU852796A1 |
| Устройство для дозирования жидких химикатов | 1980 |
|
SU954960A2 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2004 |
|
RU2265572C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ АДАПТИВНЫМ ПНЕВМОГИДРАВЛИЧЕСКИМ РОБОТОМ | 2008 |
|
RU2463156C9 |
| Командоаппарат для управления исполнительными механизмами станков | 1987 |
|
SU1474626A1 |
| ПРЕСС СРАЩИВАНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЛЕЕНОГО БРУСА | 2001 |
|
RU2180883C1 |
| СПОСОБ ПРЕССОВАНИЯ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ПРИВОДОМ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2346816C2 |
| ПНЕВМАТИЧЕСКИЙ ДОЗАТОР С ОТМЕРИВАНИЕМ ДОЗЫ ПО УРОВНЮ ЖИДКОСТИ В ТАРЕ | 2020 |
|
RU2754139C1 |
| Устройство для розлива жидкости | 1989 |
|
SU1631043A1 |

7
А-/ 1Z 16 П 20 21 /5
i J
Фиг.
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
