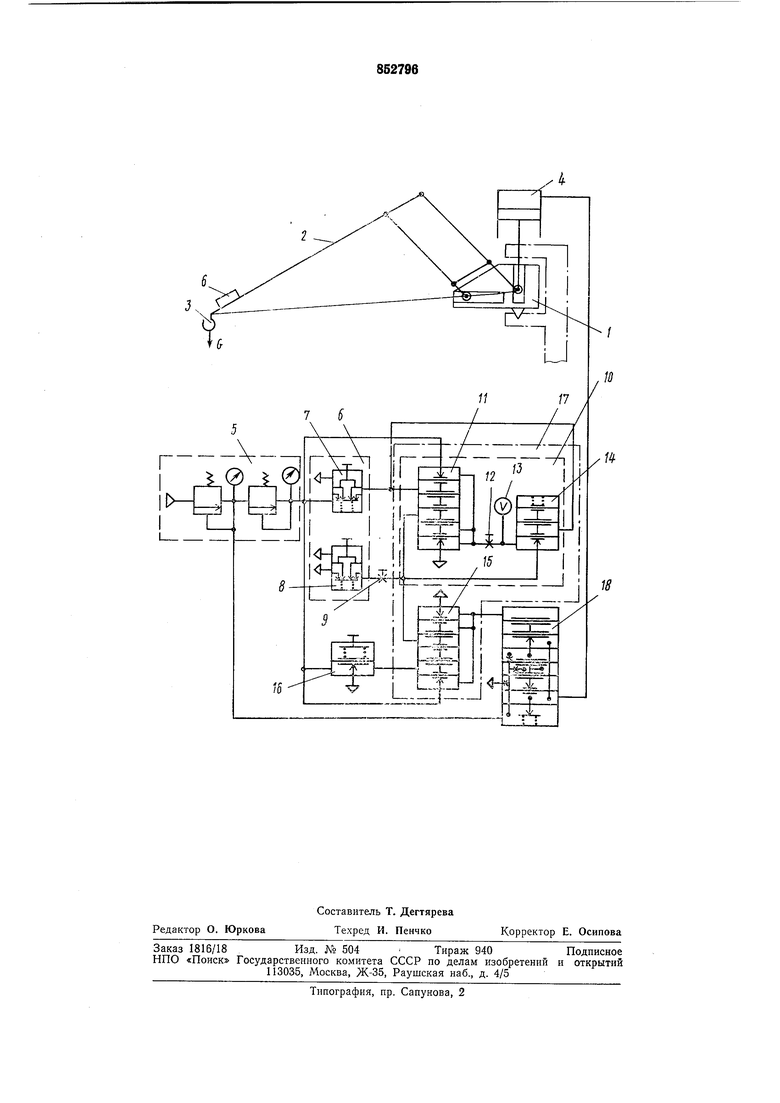
кального перемещения. Управление сбалансированным погрузочным манинулятором осуществляется пневматической системой управления, состоящей из источника 5 сжатого воздуха, блока 6 ручного управления, расположенного на стреле 2, включающего в себя пневмокнопки 7 и 8 набора и сброса давления, соединенные соответственно с входом и через пневмосопротивление 9 с выходом интегрирующего звена 10, включающего в себе сумматор 11, пневмосопротивление 12, пневмоемкость 13 и нормально-разомкнутый пневмоклапан 14. Выход интегрирующего звена связан с первым входом сумматора 15, второй вход которого соединен с выходом узла 16 балансировки стрелы, выполненного в виде задатчика давления. Интегрирующее звено 10 и сумматор 15 составляют узел 17 набора давления и поддержання его величины, выход которого через усилитель 18 давления и мощности соединен с цилиндром 4 пневмопривода вертикального перемещения.
Устройство работает следующим образом.
После включения устройства питание от источника 5 сжатого воздуха поступает на усилитель 18 давления и мощности и на систему управления. При этом на выходе узла 16 балансировки стрелы устанавливается давление, обеспечивающее уравновешивание стрелы. Это давление с выхода узла 16 балансировки стрелы через сумматор 15 поступает на вход усилителя 18 давления и мощности, на выходе которого устанавливается пропорциональное входному сигналу высокое давление, уравновешивающее стрелу 2. Для транспортировки груза оператор подводит вручную стрелу к грузу, обеспечивает захват последнего и нажимает нневмокнопку 7 набора давления. При этом управляющее давление поступает на сумматор И интегрирующего звена 10 и на пневмоклапан 14, замыкая обратную связь интегрирующего звена, в которой установлены регулируемое пневмосопротивление 12 и нневмоемкость 13, определяющие постоянную времени интегрирования. Давление на входе интегрирующего звена.начинает линейно возрастать. Соответственно возрастает давление на входе сумматора 15, на входе усилителя 18 давления и мощности и на выходе из него. Процесс продолжается до тех пор, пока на выходе усилителя 18 давления и мощности и в нолости цилиндра 4 нневмопривода вертикального перемещения не установится давление, уравновешивающее поднимаемый груз. Как только груз оторвется от основания, пневмокнопка 7 набора давления отпускается. При этом разрывается
цепь обратной связи интегрирующего звена 10, и на соответствующем входе сумматора 15 заноминается управляющее давление, обеспечивающее уравновешивание груза. Пронорциональное ему высокое давление, уравновешивающее груз, поддерживается на выходе усилителя 18 давления и мощности. Далее оператор производит необходимые
манипуляции с грузом, при этом постоянство давления в цилиндре 4 пневмопривода вертикального перемещения.обеспечивается усилителем 18 давления и мощности. После окончания транспортировки оператор нажимает пневмокнопку 8 сброса давления, при этом давление, обеспечивающее уравновешивание груза и занертое на входе сумматора 15, сбрасывается в атмосферу через пневмосопротивление 9, обеснечивающее необходимую скорость сброса. На выходе усилителя 18 давления и мощности остается давление, соответствующее весу стрелы. После освобождения захвата манипулятор готов к следующему циклу.
Формула изобретения
Погрузочный манинулятор, содержащий стрелу, выполненную в виде щарнирного
нантографа, соединенную со штоком цилиндра пневмопривода вертикального перемещения, гидравлически связанного с системой управления, включающей блок балансировки стрелы, блок ручного управления, пневмокнопки набора и сброса давления, блок набора давления и поддержания его величины, выход которого через усилитель соединен с указанным цилиндром, отличающийся тем, что, с целью повышения удобства в эксплуатации, точности позиционирования манипулятора и расширения его функциональных возможностей, блок набора давления и поддержания его величины выполнен на аналоговых элементах в виде последовательно соединенных интегрирующего звена, вход которого соединен с пневл-юкнопкой набора давления, а выход через пневмосопротивление - с пневмокнопкой сброса давления, и сумматора, первый вход которого соединен с блоком балансировки стрелы, второй - с выходом интегрирующего блока, в линии положительной обратной, связи которого установлен нормально открытый пневмоклапан, управляющий вход которого соединен с пневмокнопкой набора давления, а усилитель выполнен в виде аналогового усилителя давления и мощности. Источники информации,
принятые во внимание при экспертизе 1. Патент Японии № 46-452, кл. 83 F, 51.
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
| Погрузочный манипулятор | 1984 |
|
SU1216148A1 |
| Система управления грузоподъемным средством | 1980 |
|
SU893824A1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| ПНЕВМАТИЧЕСКИЙ ДОЗАТОР С ОТМЕРИВАНИЕМ ДОЗЫ ПО УРОВНЮ ЖИДКОСТИ В ТАРЕ | 2020 |
|
RU2754139C1 |
| Устройство для подкожного введения газов | 1980 |
|
SU891098A1 |
| Ограничитель грузоподъемности крана-штабелера | 1985 |
|
SU1313800A1 |
| ГАЗОВЫЙ ЗАДАТЧИК ДАВЛЕНИЯ | 2000 |
|
RU2246101C2 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |