1
Изобретение относится к области горной промышленности, в частности к манипуляторам для буровых машин.
Известен манипулятор для буровых машин, включающий ходовую часть, раму, распорный домкрат, податчик буровой машины 1 J.
Недостатком этого манипулятора является то, что бурение шпуров под уголом к горизонту осуществляется за счет дополнительного привода, устанавливаемого в месте соединения стрелы манипулятора с податчиком буровой машины, что усложняет конструкцию манипулятора, ухудшает его динамические свойства.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является манипулятор для буровых машин,включающий раму, стрелу с приводами вращения и поворота, привод поворота податчика буровой машины и гибкую связь в виде двух тросов Г 2.
К недостаткам данного манипулятора относится ограниченный угол подъема его стрелы, расположение приводов подъема стрелы манипулятора и подъема буровой машины на стреле манипулятора, что ухудшает динамику работы данного манипулятора, затрудняет управление им, так как оператор определяет угол наклона машины визуально, коррекция буровой машины для бурения наклонных шпуров осуществляется по жесткому закону, зависящему от угла наклона рычага, закрепленного в основании стрелы манипулятора. К недостаткам относится также сложность конструкции, трудоемкость в эксплуатации и обслуживании .
Цель изобретения - повышение производительности труда бурильщика за счет сокращения затрат времени на вспомогательные операции.
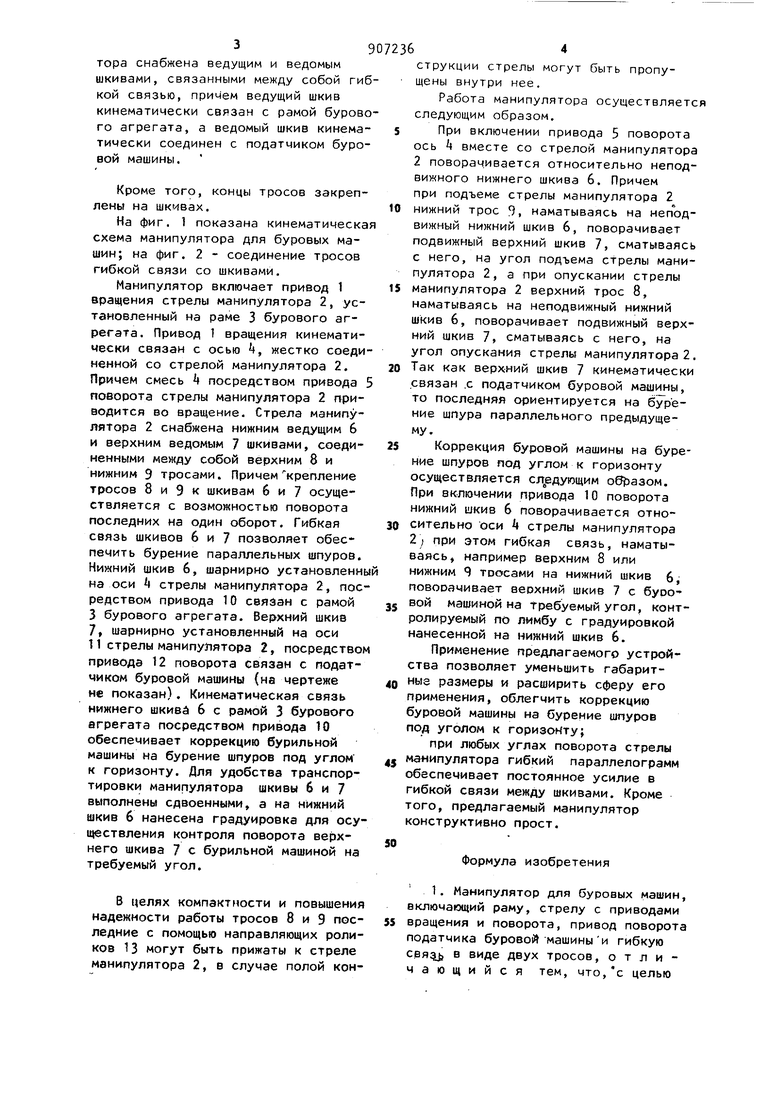
Поставленная цель достигается за счет того, что стрела манипулятора снабжена ведущим и ведомым шкивами, связанными между собой гиб кой связью, примем ведущий шкив кинематически связан с рамой бурово го агрегата, а ведомый шкив кинематически соединен с податчиком буровой машины. Кроме того, концы тросов закреплены на шкивах. На фиг. 1 показана кинематическа схема манипулятора для буровых машин; на фиг. 2 - соединение тросов гибкой связи со шкивами. Манипулятор включает привод 1 вращения стрелы манипулятора 2, установленный на раме 3 бурового агрегата. Привод 1 вращения кинематически связан с осью , жестко соеди ненной со стрелой манипулятора 2. Причем смесь k посредством привода поворота стрелы манипулятора 2 приводится во вращение. Стрела манипулятора 2 снабжена нижним ведущим 6 и верхним ведомым 7 шкивами, соединенными между собой верхним 8 и нижним 9 тросами. Причемкрепление тросов 8 и 9 к шкивам б и 7 осуществляется с возможностью поворота последних на один оборот. Гибкая связь шкивов 6 и 7 позволяет обеспечить бурение параллельных шпуров. Нижний шкив 6, шарнирно установленн на оси Ц стрелы манипулятора 2, пос редством привода 10 связан с рамой 3 бурового агрегата. Верхний шкив 7, шарнирио установленный на оси 11 стрелы манипулятора 2, посредство привода 12 поворота связан с податчиком буровой машины (на чертеже не показан). Кинематическая связь нижнего шкивй 6 с рамой 3 бурового агрегата посредством привода 10 обеспечивает коррекцию бурильной машины на бурение шпуров под углом к горизонту. Для удобства транспортировки манипулятора шкивы 6 и 7 выполнены сдвоенными, а на нижний шкив 6 нанесена градуировка для осу ществления контроля поворота верхнего шкива 7 с бурильной машиной на требуемый угол. В целях компактности и повышени надежности работы тросов 8 и 9 пос ледние с помощью направляющих роли ков 13 могут быть прижаты к стреле манипулятора 2, в случае полой кон 9 4 струкции стрелы могут быть пропущены внутри нее. Работа манипулятора осуществляется следующим образом. При включении привода 5 поворота ось k вместе со стрелой манипулятора 2 поворачивается относительно неподвижного нижнего шкива 6. Причем при подъеме стрелы манипулятора 2 нижний трос 9, наматываясь на неподвижный нижний шкив 6, поворачивает подвижный верхний шкив 7, сматываясь с него, на угол подъема ctpeлы манипулятора 2, а при опускании стрелы манипулятора 2 верхний трос 8, наматываясь на неподвижный нижний шкив 6, поворачивает подвижный верхний шкив 7, сматьгваясь с него, на угол опускания стрелы манипулятора 2. Так как верхний шкив 7 кинематически связан .с податчиком буровой машины, то последняя ориентируется на бурение шпура параллельного предыдущему. Коррекция буровой машины на бурение шпуров под углом к горизонту осуществляется сл едующим об эазом. При вклю1чении привода 10 поворота нижний шкив 6 поворачивается относительно оси стрелы манипулятора Zj при этом гибкая связь, наматываясь например верхним 8 или нижним 9 тросами на нижний шкив 6 поворачивает верхний шкив 7 с буоовой машиной на требуемый угол, контролируемый по лимбу с градуировкой нанесенной на нижний шкив 6. Применение предлагаемого устройства позволяет уменьшить габаритные размеры и расширить сферу его применения, облегчить коррекцию буровой машины на бурение шпуров под уголом к горизонту; при любых углах поворота стрелы манипулятора гибкий параллелограмм обеспечивает постоянное усилие в гибкой связи между шкивами. Кроме того, предлагаемый манипулятор конструктивно прост. Формула изобретения 1. Манипулятор для буровых машин, включающий раму, стрелу с приводами вращения и поворота, привод поворота податчика буровоймашиныи гибкую свя в виде двух тросов, отличающийся тем, что,с целью

| название | год | авторы | номер документа |
|---|---|---|---|
| Буровой станок | 1983 |
|
SU1154457A1 |
| Автоподатчик телескопический | 1982 |
|
SU1063993A1 |
| Агрегат для проведения выработок большого сечения | 1979 |
|
SU911038A1 |
| Устройство для бурения шпуров В.И. и Ю.В.нестеренко | 1988 |
|
SU1735577A1 |
| БУРОВОЙ СТАНОК | 2005 |
|
RU2307910C1 |
| Манипулятор бурильных машин | 1988 |
|
SU1602983A1 |
| Манипулятор для бурильных машин | 1982 |
|
SU1099066A1 |
| Портальная шахтная буровая установка | 1980 |
|
SU901502A1 |
| БУРОВОЙ АГРЕГАТ ДЛЯ СТРОЧНОГО БУРЕНИЯ ШПУРОВ | 1997 |
|
RU2130545C1 |
| Буропогрузочная машина | 1980 |
|
SU1004633A1 |
