(54) УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ
1
Изобретение относится к электротехнике и может быть использовано для построения систем управления асинхронными электроприводами с вентильным преобразователем частоты.
Известно устройство для частотного управления асинхронным электроприводом, содержащее преобразователь, имеющий раздельные входы для управления напряжением и частотой. Оно включает контур регулирования тока, в функции которого регулируется напряжение преобразователя. Управление частотой осуществляется путем задания абсолютного скольжения, соединенного с первым входом сумматора. С валом двигателя соединен прецензионный датчик скорости, выход которого соединен через второй вход сумматора с блоком управления частотой, 1.
Однако использование датчика скорости усложняет привод.
Наиболее близким к изобретению по технической сущности является устройство для частотного управления асинхронным электроприводом, содержащее вентильный преобразователь частоты с блоками управления напряжением и частотой, контуры регулирования скорости, модуля вектора тока статора и его активной составляющей с соответствующими регуляторами и датчиками.
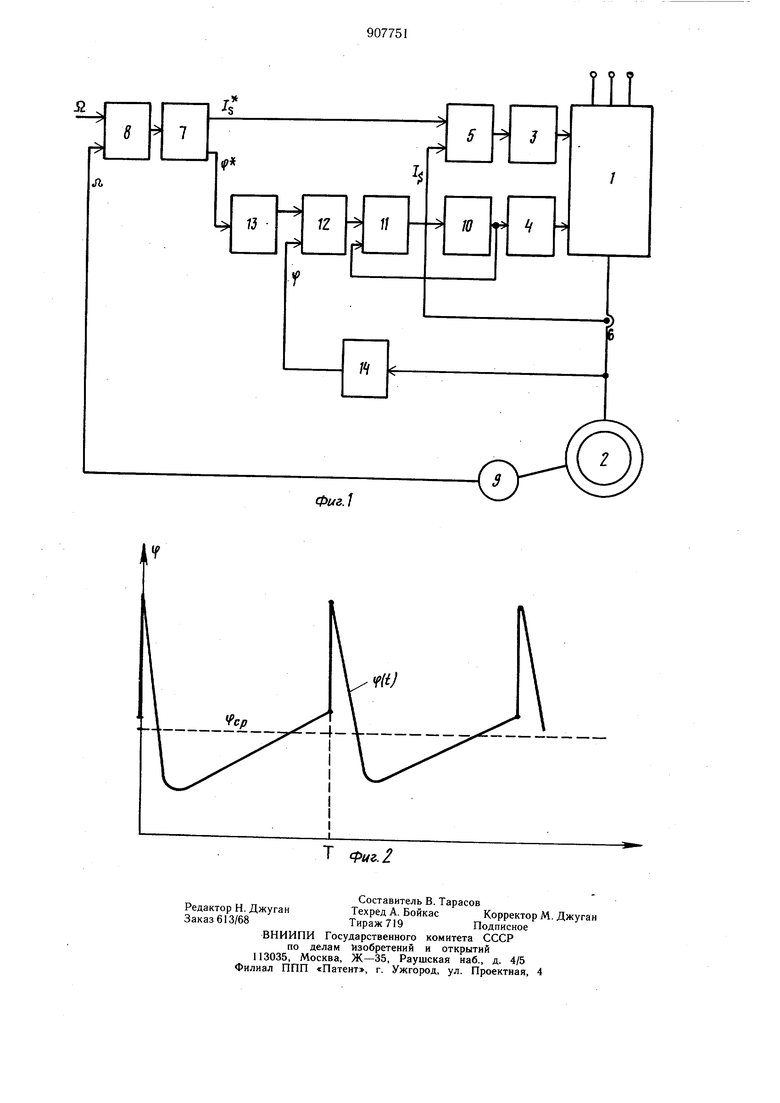
В данном электроприводе сигналы зада5 кия полного тока и его активной составляющей вырабатываются функциональным преобразователем, на вход которого поступает выходной сигнал регулятора скорости. Регулирование полного тока осуществляется в функции заданного и фак10тического, определяемого с помощью датчика тока, значения, причем выходной сигнал регулятора полного тока воздействует на вход блока управления напряжением. На входе регулятора частоты скольжения сравниваются значения сигнала задания активной составляющей тока статора и снимаемого с датчика активного тока сигнала,обратной связи. Выходной сигнал регулятора частоты скольжения определяет величины скольжения асин20хронного двигателя. Этот сигнал после суммирования с сигналом датчика скорости является сигналом задания частоты преобразователя, воздействующим на вход блока управления частотой. Формирование сигнала задания абсолютного скольжения в функции рассогласования по активной составляющей тока статора позволяет осуществлять регулирование скольжения с учетом электромагнитного переходного процесса в мащине, что повыщает быстродействие электропривода. Кроме того, режим работы привода, определяемый настройкой функционального преобразователя, реализуется за счет регулирования полного и активного токов. При этом -существенно снижаются требования к точности применяемого датчика скорости, необходимой для реализации выбранного закона частотного управления 1. Недостатками данного электропривода являются низкая точность и качество регулирования за взаимного влияния контуров регулирования пблного тока и его активной составляющей, а также за счет использования аналогового принципа регулирования скольжения в функции активной составляющей тока при существенной нелинейности объекта регулирования. Цель изобретения - повыщение точности регулирования. Поставленная цель достигается тем, что в устройство для частотного управления асинхронным электроприводом, содержащее вентильный преобразователь частоты с блоками управления напряжением и частотой, регулятор, тока, один из входов которого через функциональный преобразователь подключен к регулятору скорости, второй вход - к датчику тока, а выход - к блоку управления напряжением, и блок суммирования, введены датчик фазового угла, фильтр, времязадающий блок, нуль-индикатор, при этом первый вход блока суммирования соединен с датчиком,:фазового угла, второй вход через фильтр и функциональный преобразователь с регулятором скорости, а выход - с одним из входов.времязадающего блока, выход которого через нуль-индикатор подключен к блоку управления частотой,, а второй вход времязадающего блока подключен к вь1ходу нуль-индикатора. На фиг. 1 представлена функциональная схема устройства для управления асинхронным электроприводом; на фиг. 2 - зависимость фазового угла асинхронной мащины от времени. Устройство содержит подсоединенный к преобразователю 1 частоты и подключенный к асинхронному двигателю 2 блок 3 управления напряжением и блок 4 управления частотой, регулятор 5 модуля вектора тока статора, датчик 6 тока статора, функциональный преобразователь 7, подключенный к выходу регулятора 8 скорости, к .одному из входов которого подключен датчик 9 скорости вращения. В электропривод входит также нуль-индикатор 10, выход которого соединен с блоком 4 управления частотой, времязадающий блок 11, выход которого соединен с входом нуль-индикатора 10, один из входов - с выходом нуль-индикатора, а вто- рой вход - с блоком 12 суммирования, входы которого подключены к выходам фильтра 13 и датчика 14 фазового угла, причем фильтр 13 через функциональный преобразователь 7 подключен к регулятору 8 скорости. Электропривод работает . следующим образом, Сигналы задания контуров, регулирования модуля J и фазового угла ср вектора тока статора в полярных координатах напряжения статора формируются функциональным преобразователем 7 по выходному сигналу регулятора 8 скорости таким образом, чтобы обеспечить работу привода в заданном режиме, например в режиме постоянства потокосцепления ротора YC const. Регулирование модуля вектора тока статора осуществляется с помощью регулятора 5 тока, на входы которого поступают сигналы задания 3 обратной связи Jj с датчика 6 тока, а выходной сигнал регулятора воздействует на блок 3 управления напряжением преобразователя 1 частоты, Для управления частотой преобразователя используется принцип частотно-импульсной модуляции (ЧИМ). Сигнал задания-фазового угла « с выхода функционального преобразователя 7 через фильтр 13 поступает на вход блока 12 суммирования, где алгебраически суммируется с сигналом обратной связи Ч (фиг. 2), снимаемым с выхода датчика 14 фазового угла. Выходной сигнал блока 12 суммирования, представляющий собой сигнал рассогласования между заданным и фактическим значениями фазового угла, воздействует на времязадающий блок 11, осуществляющий временное преобразование данного сигнала в соответствии с выбранным законом частотно-импульсного модулирования. При равенстве выходного сигнала времязадающего блока 11 нулю срабатывает нуль-индикатор 10, выходной сигнал которого воздействует на вход бло управления частотой, а также возвращает в исходное состояние времязадающий блок. Использование частотно-импульсного модулирования для регулирования частоты преобразователя обусловлено тем, что в преобразователях частоты с звеном постоянного тока и в непосредственных преобразователях частоты с прямоугольной модуляцией управляющий вектор тока или напряжения при коммутации поворачивается скачком на угол, равный Х/3. При этом в течение межкоммутационного интервала протекает электромагнитный переходный процесс и, если режим стационарный, система возвращается к состоянию, предшествовавшему коммутации. Таким образом, стационарный режим квазинепрерывной системы: преобразователь частоты - асинхронный двигатель является периодическим режимом, характеризуемым непрерывной полезной составляющей, и микропереходным процессом коммутации. При этом информация о состоянии системы в течение микропереходного процесса (электромагнитного переходного процесса в межкоммутационном интервале) является значительно более полной, чем информация 0 непрерывной полезной составляющей процесса. Поэтому в тех случаях, когда применяются непрерывные системы управления частотой преобразователя происходит как бы потеря части информации. Использование ЧИМ позволяет получить полную информацию о процессе. В качестве переменной; характеризующей состояние системы, можно выбрать фазовый угол р между векторами тока и напряжения статора. При этом осуществляется регулирование вектора тока статора в системе полярных координат, связанных с вектором напряжения статора. Регулирование модуля и фазы тока статора в отличие от регулирования полного и активного тока позволяет в значительной мере устранить взаимное влияние контуров и повысить качество регулирования. На фиг. 2 приведен график f (t) зависимости фазового угла от времени в стационарном режиме работы асинхронного электропривода с преобразователем частоты на основе автономного инвертора тока. Зависимость Ч (t) является периодической и содержит, например, информацию о скорости в то время как среднее значение %р , являющееся полезной составляющей, такой информации не содержит. Если принять, что регулирование ведется по среднему значению фазового угла, должно выполняться равенство i/cp.dt 4.; где Т - время межкоммутационного интервала. В стационарном режиме Ч const, поэтому )dt О, или, освобождаясь от Т, величина которого до очередной коммутации неизвестна, получаем ;J( )dt 0. Момент очередной коммутации определяется выражением Т min (т,/( ) X Xdt 0}. ° Частотно-импульсный модулятор, реализуя последнюю зависимость, определяет длительность текущего межкоммутационного интервала. Интегрирование разности осуществляется времязадающим блоком, который в общем случае может вычислять и другие составляющие, необходимые для коррекции системы в динамике. Равенство интеграла разности «f нулю фиксируется нуль-индикатором, который вырабатывает команду на очередную коммутацию преобразователя. В этом случае блок управления частотой существенно упрощается, так как не содержит задающего генератора. Кроме того, для управления частотой преобразователя в рассматриваемой системе не требуется дополнительная информация о скорости двигателя кроме той которая содержится в сигнале cf (t). Фильтр между функциональным преобразователем и сумматором служит для согласования динамических характеристик контуров регулирования модуля тока и фазового угла. Регулирование вектора тока статора в полярных координатах позволяет практически устранить взаимное влияние контуров регулирования и уменьшить чувствительность системы к настройке функционального преобразователя. Использование принципа частотно-импульсной модуляции для управления частотой преобразователя повышает точность и качество регулирования скорости и момента в электроприводе. Формула изобретения Устройство для частотного управления асинхронным электроприводом, содержащее вентильный преобразователь частоты с бло ками управления напряжением и частотой, регулятор тока, один из входов которого через функциональный преобразователь подключен к регулятору скорости, второй вход --К датчику тока, а выход - к блоку управления напряжением, и блок суммирования, отличающееся тем, что, с целью повышения точности регулирования, в него введены датчик фазового угла, фильтр, времязадающий блок, нуль-индикатор, при этом хгервый вход блока суммирования соединен с датчиком фазового угла, второй в(ход через фильтр и функциональный „.. „„„. ,. , .. .... преобразователь с регулятором скорости, а выход - с одним из входов времязадающего блока, выход которого через нульиндикатор подключен к блоку управления частотой, а второй вход времязадающего блока подключен к выходу нуль-индикатора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 442561, кл. Н 02 Р 5/34, 1972. 2.Авторское свидетельство СССР № 716125, кл. Н 02 Р 7/42, 1978.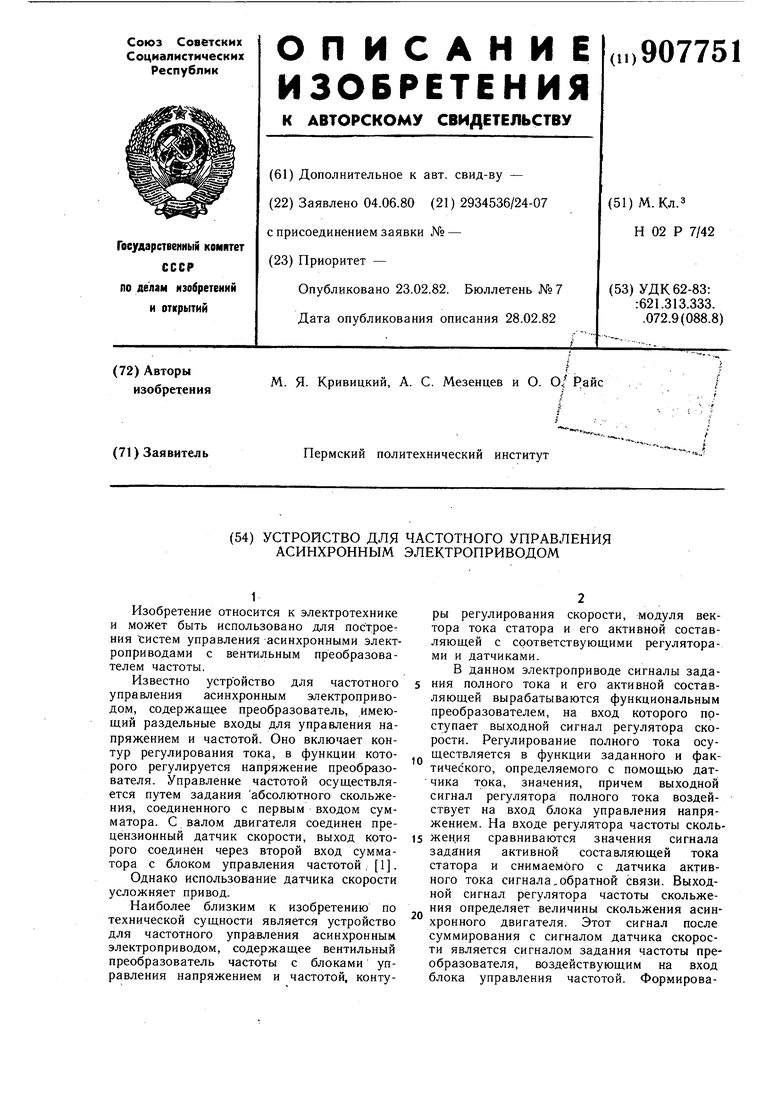
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотнорегулируемый электропривод | 1985 |
|
SU1292156A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1379932A2 |
| Устройство для управления многодвигательным электроприводом переменного тока | 1987 |
|
SU1422358A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |