(S) ЗАХВАТ ДЛЯ СЪЕМА БОБИН С БОБИНОДЕРЖАТЕЛЕЙ ТЕКСТИЛЬНЫХ МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки паковок с намоточных машин | 1982 |
|
SU1043091A1 |
| Устройство для перегрузки паковок и намоточных машин | 1980 |
|
SU977345A1 |
| Устройство для непрерывной намотки нити | 1982 |
|
SU1110733A1 |
| Устройство для намотки нитевидногоМАТЕРиАлА | 1979 |
|
SU848462A1 |
| Устройство для непрерывной намотки текстильных паковок | 1990 |
|
SU1784030A3 |
| Автоматическая мотальная машина | 1979 |
|
SU825441A1 |
| Устройство для непрерывной намотки текстильных паковок | 1989 |
|
SU1715702A1 |
| Устройство для перезаправки револьверной мотальной головки | 1989 |
|
SU1662914A1 |
| Устройство для перезаправки револьверной мотальной головки | 1987 |
|
SU1461740A2 |
| Устройство для перезаправки нити при смене бобин в намоточных машинах | 1982 |
|
SU1043090A1 |
I ;
Изобретение относится к области , производства химических волокон, в частности к устройствам для съема намотанных боб.ин с бобинодержателей приемно-намоточной или намотомновытяжной машины..
Известен захват для съема паковок, содержащий два двуплечих рычага, соответствующие, плечи которых соединены кольцом для захвата патрона, а . другие их плечи сдвигаются или раздвигаются с помощью подвижно.го клина, связанного с электромагнитным приводным механизмом l . Этот захват недостаточно универсален, поскольку он может захватывать только ближний со стороны обслуживания цилиндрический участок патрона, свободный от намотки. Это снижает технологические возможности применения этого захвата.
Известен также захват, содержащий два двуплечих рычага, на одном плече камдого из которых смонтированы зажимные элементы, опорную пластину с закрепленным на ней силовым цилинд: ром привода рычагов, и упоры, контактирующие с рычагами. При этом, упоры смонтированы на штоке силового цилиндра, а оси поворота рычагов размещены на пластине .
Недостатком такого захвата-является то, что его рычаги Имеют только возможность поворота, но не имеют
10 возможности прямолинейного перемещения, что ограничивает его применение. Этот захват может быть использован только в тех машинах, где бобинодержатель вращается, но не перемещается
15 при увеличении диаметра бобины. На маитнах, в которых бобинодержатель перемещается в процессе работы, такой захват неприемлем, так как он находится а зоне перемещения бобино20держателя.
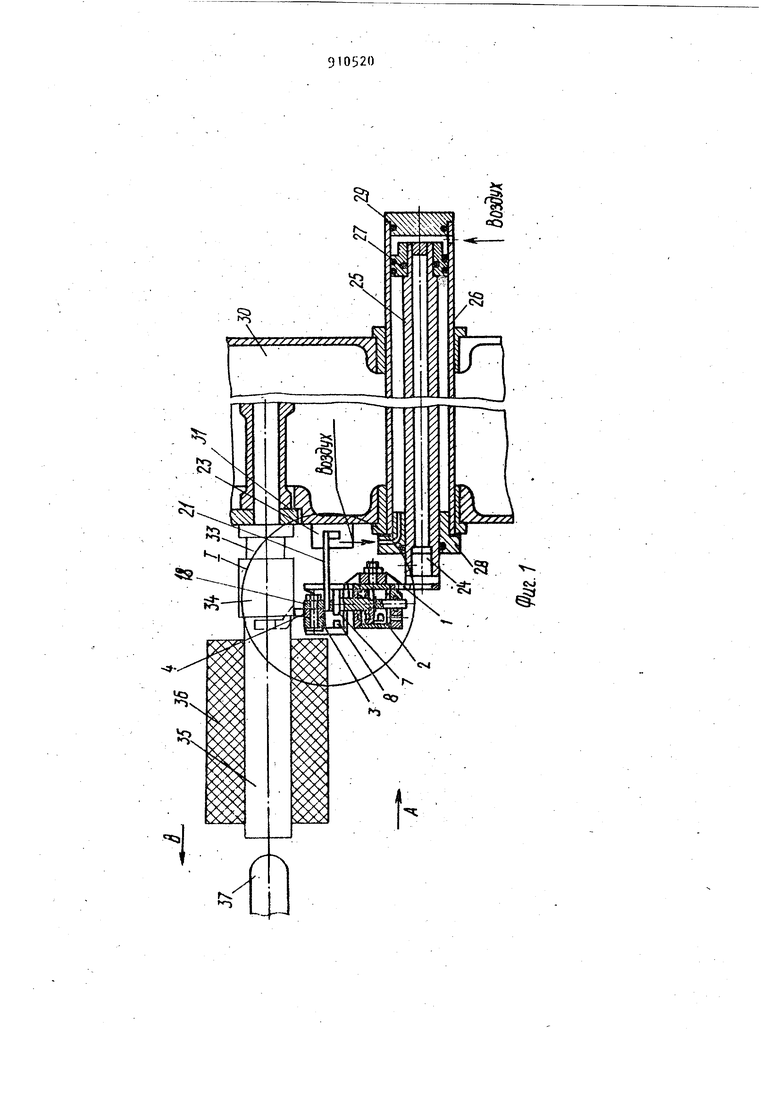
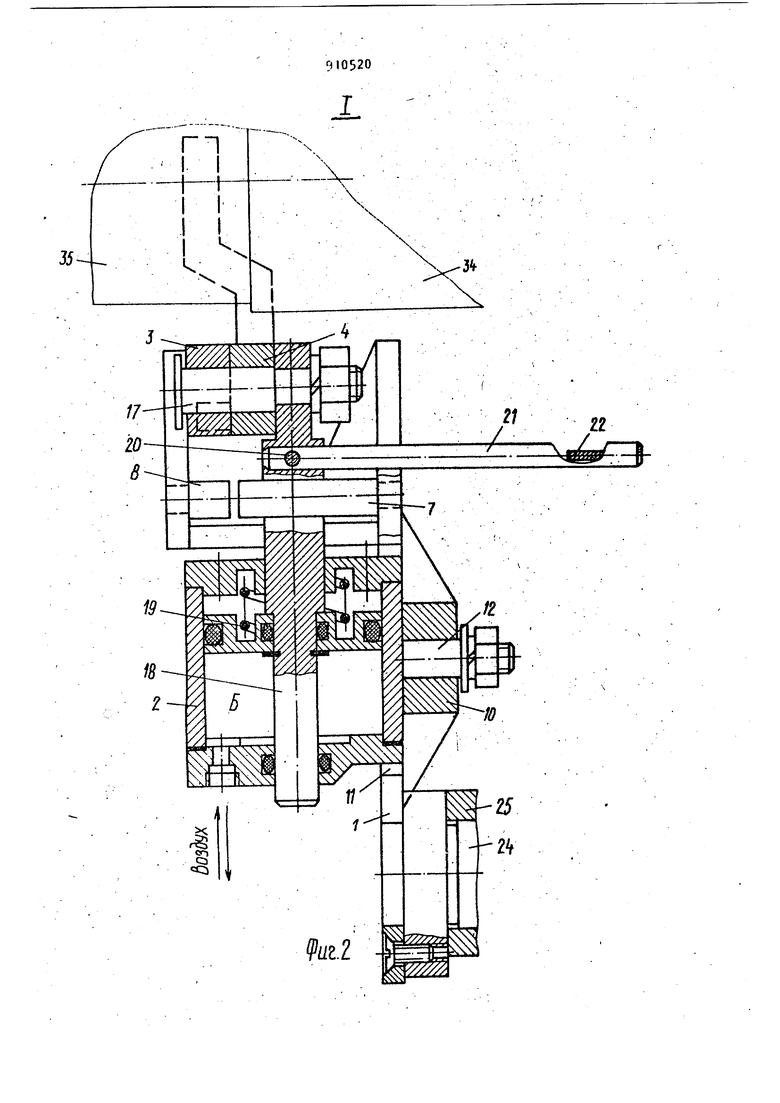
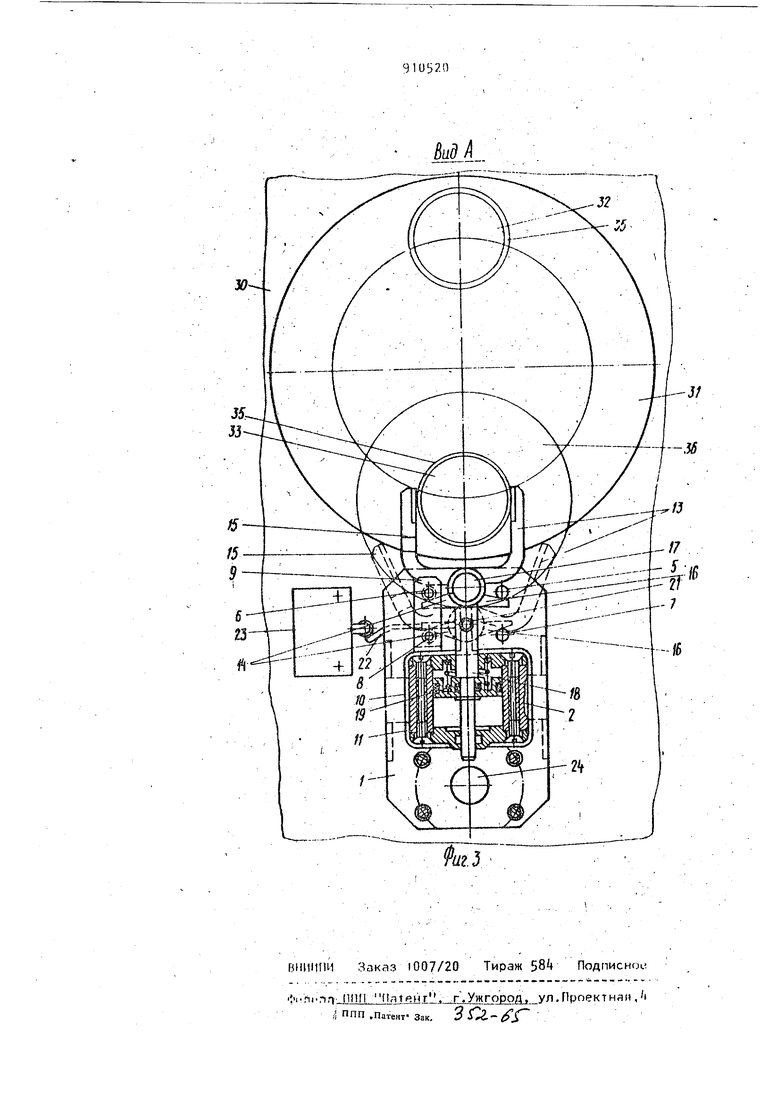
Цолыо изобретенитн является расширение технологических;возможностей захвата. Цель достигается тем, что в захва те, содержащем дйа двуплечих рычага, на одном плече каждого из которых смонтированы зажимные элементы, опор ную пластину с закрепленным на ней силовым цилиндром привода рычагов, и упоры, контактирующие с рычагами, рычаги смонтированы крест-накрест на одной оси, закрепленной на штоке силового цилиндра, упоры установлены на пластине, а свободные концы рычагов размещены между упорами. При этом силовой цилиндр смонтирован на пластине шарнирно, На фиг.1 изображено устройство для съема пакорок с намоточно-вытяжной машины, на котором смонтирован предлагаемый захват, продольный., разрез; на фиг.2 - узел I на фиг.1 (захват); на фиг.З - вид А на фиг.1. Предлагаемый захват состоит из пластины 1, пневмоци|1индра 2, правого 3 и левого k двуплечих рычагов, а также четырех упоров, верхних правого 5 и левого 6,и нижних - прз вого 7 и левого 8, Пластина 1 имеет приваренные к ней Г-образный кронштейн 9 и платик 10. Пневмоцилиндр 2 установлен в прямоугольном отверстии 11 пластины 1 с определенным зазором по периметру для обеспечения его поворота на некоторый угол, и с этой же целью он шарнирно закреплен своей осью 12 в отверстии платика 10, Правый двуплечий рычаг 3 имеет прямую в поперечном сечении форму и состоит из верхнего 13 и нижнего Н плечей.. Левый двуплечий рычаг k имеет изогнутую в поперечном сечении форму и состоит из верхнего 15 и нижнего 16 плечей. Оба двуплечих рычага, шарнирно смонтированы на одной оси 17, жес;тко закрепленной на конце штока 18, подпружиненного при помощи пружины 19. Нижнее плечо И рычага 3 расположено между упорами 6 и 8 и взаимодействует с ними в конечных положе ниях хода штока 18. Нижнее плечо 16 рычага взаимодействует соответстзенно с упорами 5 и 7. Благодаря тому,- что правый рычаг 3 имеет прямук, а левый рычаг k - изогнутую в попе,-речном сечении форму, их -нижние плечи и 16 расположены рядом на оси 17, а верхние плечи 13 и 15 расположены строго противоположно друг другу. Со штоком 18 жестко соединены при помощи штифта 20 ось 21 с приваренной к ней планкой 22, контактирующей в конце хода штока с микропереключателем 23. Пластина 1 при помощи переходника 2 установлена на штоке 25 пневмоцилиндра 2б. На другом конце штока смонтирован поршень 27. На торцах пневмоцилиндра 2б имеются крышки 28 и 29. Пневмоцилиндр 26 установлен в корпусе 30 намоточного устройства, в котором- смонтирована револьверная головка 31 с размещенными на ней двумя бобинодержателями 32 и 33На оба бобинодержателя до упор,а с выступом З надеты бобины 35, причем бобинодёржатель 32 находится в рабочем положении, то есть на его бобину наматывается нить (ie показано) , а бобинодёржатель ЗЗ в положении смены бобины, то есть на его бобину намотана паковка 36. Сталкивание бобины 35 с паковкой Зб производится на штырь 37 устройства для транспортировки паковок (не показано). Работа захвата осуществляется Следующим образом. После того, как повернется револьверная головка 31 и бобинодёржатель 33 с намотанной на его бобину 35 паковкой Зб займет положение смены бобин, производится разжим бобины и дается сигнал на подачу воздуха в Пневмоцилиндр 2 привода захвата. Воздух, поступая в направлении, указанном стрелкой, заполняет полость в пневмоцилиндре 2 и перемещает вверх поршень со штоком 18, одновременно сжимая пружину 19. В начале движения штока 18 верхнее 13 и нижнее плечи правого рычага 3.1 а также верхнее 15 и нихшее 16 плечи левого рычага З одятся в нижнем положении, указанном пунктирными линиями. По мере движения штока 18 вверх, вместе с ним перемещаются вверх оба рычага, причем в определенный момент их нижние плечи находят на верхние упоры и начинают взаимодействовать с ними, Так нижнее плечо 1 правого рычага 3 находит на верхний левый упор 6 и, взаимодействуя с ним, поворачивае.тся против часовой стрелки вместе с верхним плечом 13 вокруг оси 17. дновременно нижнее плечо 16 левого ; ычага k взаимодействует с верхним правым упором 5 и поворачивается
вместе с верхним плечом 15 по часовой стрелке вокруг оси 17. Поворачиваясь навстречу друг другу, оба двуплечих рычага 3 и 4 захватывают с противоположных сторон бобину 3.5 за ее свободный от паковки участок, причем оба рычага самоцентрируются по бобине за счет их поворота на некоторый угол вместе с пневмоцилиидром 2 и его осью 12 в отверстии платика 10. Когда шток 18 поднимется в крайнее верхнее положение и будет произведен захват бобины рычагами, планка 22 нажмет на контакт микропереключателя 23 и даст сигнал на подачу воздуха в правую полость пневмоцилиндра 2б. Давлением воздуха переместятся влево поршень 27 ср Штоком 25 и соединенная с ним пластина 1 с установленными на ней захватом с приводом, а также зажатая рычагаг ми бобина 35 с паковкой 36, причем последние переместятся с бобинодержателя 33 на штырь 37 устройства для транспортировки пакбвок. Затем дается сигнал на отвод воздуха из полости б пневмоцилиндра 2 и на подачу его в левую полость пйевмоцилиндра 26 через отверстие крышки 28.
При отводе воздуха из полости Б пневмоцилиндра 2 поршень со штоком 18 и соединенными с ним рычагами 3 и i под действием пружины 19 опустятся вниз, причем нижние плечи Ц и 16 рычагов при взаимодействии с упорами 8 и 7 повернутся соответственно один по часовой, другой - против часовой стрелки и займут свое исходное положение, обозначенное пунктирными линиями, вместе с верхними плечами 13 и 15, обеспечивая возможност при следующем повороте револьверной головки 31 придти в положение смены бобины бобинодержателю 32.
при подаче воздуха в левую полость пневмоцилиндра 26 шток 25 с размешенными на его концах поршнем 27 и пластиной 1 с установленными на ней захватом с приводом переместятся вправо, в свое исходное положение для захвата и съема следующей бобины с паковкой .
Конструкция предлагаемого захвата позволяет расширить технологические .возможности его применения и обеспе чивает надежный захват бобин с паковкой с последующим их съемом как с бобинодержателей с неподвижны осями, так и с бобинодержателей с перемещающимися осями.
Формула изобретения
Захват для съема бобин с бобинодержателей текстильных машин содерщий два двуплечих рычага, на одном плече каждого из которых смонтированы зажимные элементы, опорную пластину с закрепленным на ней сило-вым цилиндром привода рычагов, и упоры, контактирующие с рычагами, отличающийся тем, что, с целью расширения технологических возможностей, рычаги смонтированы крест-накрест на одной оси, закрепленной на штоке силового цилиндра, упоры устанЬвлены на пластине, а свободные концы рычагов размещены между упорами, при дэтом силовой цилиндр смонтирован на пластине ширнирно.
:Источники информации,
принятые во внимание при экспертизе
кл. 57-52, 197..
w
