(54) УПРУГИЙ ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ ВРАЩАТЕЛЬНОГО
ТИПА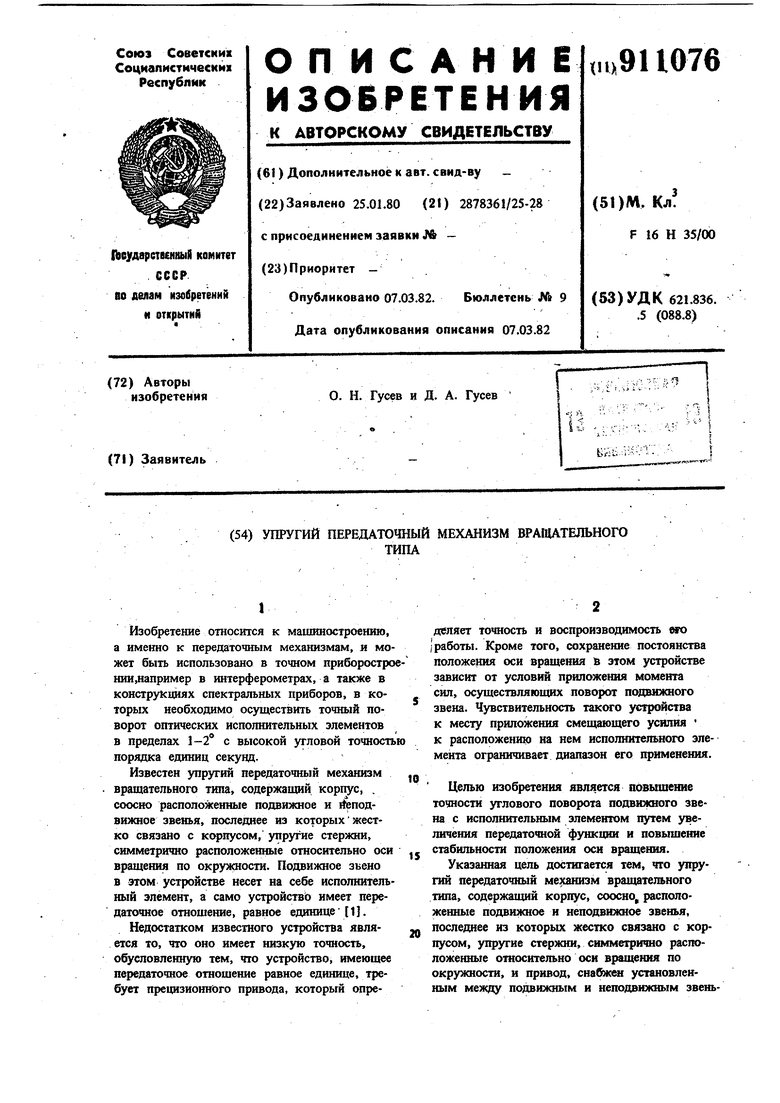

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕНИТНАЯ УСТАНОВКА | 2005 |
|
RU2290587C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438857C2 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Датчик давления | 1979 |
|
SU877374A1 |
| Зажимное устройство и станок, оборудованный таким устройством | 2020 |
|
RU2759352C1 |
| ВАРИАТОР КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1995 |
|
RU2079751C1 |
Изобретение относится к машиностроению, а именно к передаточным механизмам, и может быть использовано в точном приборостроениид{апример в интерферометрах, а также в конструкциях спектральных приборов, в которых необходимо осуществить точный поворот оптических исполнительных элементов в пределах 1-2 с высокой угловой точностью порядка единиц секунд.
Известен упругий передаточный механизм вращательного типа, содержащий корпус, соосно расположенные подвижное и 1 подвижное звенья, последнее из которых жестко связано с ксфиусом, упругие стержни, симметрично расположенные относительно оси вращения по окрузкности. Подвижное зьено в этом устройстве несет на себе исполнительный элемент, а само устройство имеет передаточное отнощение, равное единице 1.
Недостатком известного устройства является то, что оно имеет низкую точность, обусловленную тем, что устройство, имеющее передаточное отношение равное единице, требует прецизионного привода, который определяет точность и воспроизводимость wo (работы. Кроме того, сохранение постоянства положения оси вращения & этом устройстве зависит от условий приложения момента сил, осуществляющих поворот подвижного звена. Чувствительность такото устройства к месту приложения смещающего усилия к расположению на нем исполнительного элемента ограничивает диапазон его применения.
tp
Целью изобретения является повыщение точности углового поворота подвижного звена с исполнительным элемеитом путем з еличения передаточной функции и повыщение стабильности положения оси вращения.
IS
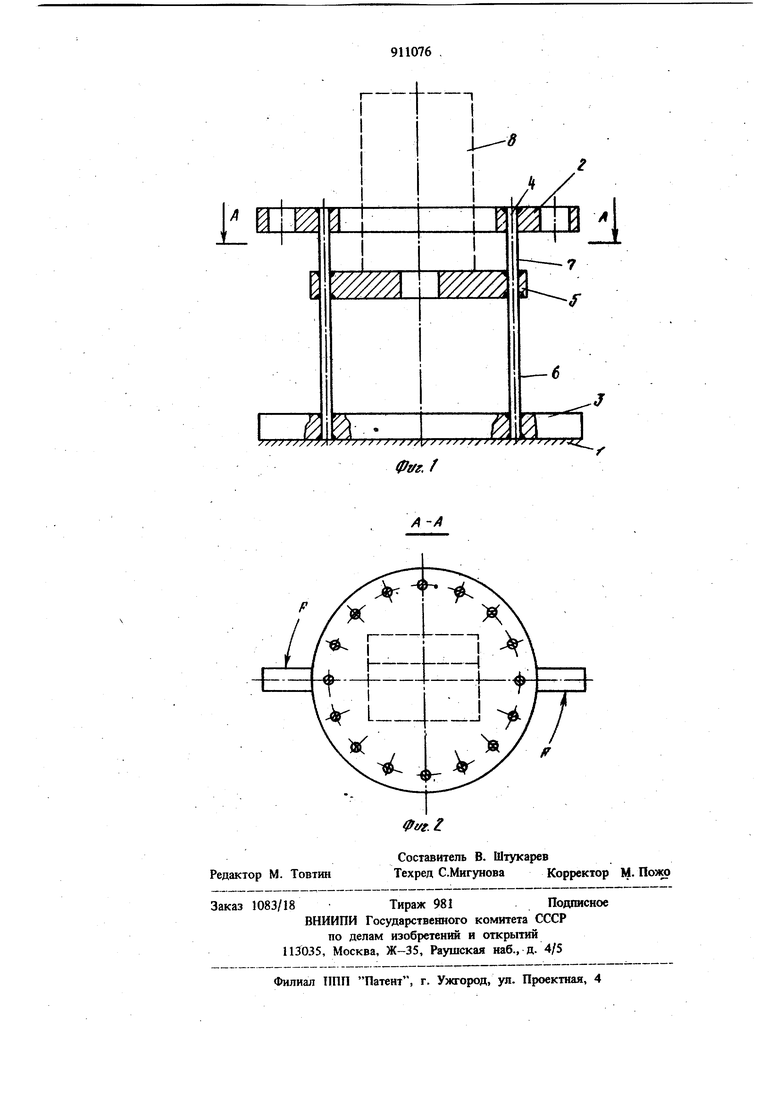
Указанная цель достигается тем, что упругий передаточный механизм вращательного типа, содержащий корпус, соосно, расположенные подвижное и неподвижное звенья, последнее из которых жестко связано с кор30пусом, упругие стержни, симметрично расположенные относительно оси вращения по окружности, и привод, снабжен установленным между подвижным и неподвижным звень39ями, по крайней мере, одним дополнительным звеном. При этом участки упругих стержней между неподвижным, дополнительным и подвижным звеньями выполнены из материалов с различными параметрами. На фиг. 1 изображен механизм, общий вид; на фиг.2 - разрез А-А на фиг. 1. Упругий манизм вращательного типа содержит корпус 1, соосно расположенные подвижное 2 и неподвижное 3 звенья, последнее ife которых жестко связано с корпусом 1, упругие стержни 4, симметрично расположенные относительно оси вращения по окружности, и привод (не показан). Механизм снабжен установленным между подвижным 2 и неподвижным 3 звеньями, по крайней мере, одним дополнительным звеном 5. При этом, участки 6 и 7 между неподвиж ным 3 и дополнительным 5 и между дополвитальным 5 и подвижным 2 звеньями соответственно выполнены из материалов с различными параметрами. На дополнительном звене 5 устанавливается исполнительный элемент 8. Механизм работает следующим образом. При вращении приводом (не показан) подвижного звена 2 упругие стержни 4 изгибаются и скрз чиваются, передавая крутящий момент дополнительному звену 5 одновременно и равномерно поворачивая его вокруг оси, которую образовывают упругие стержни 4. Следует отметить, что упругие стержни 4, расположенные между звеньями 2-5 и 5-3, могут быть изготовлены раздельно из материалов с различными параметрами в зависимости от требуемой жесткости механизма и передаточной функции (различным коэффициентом упругости, сечением и т.д.). Передаточнь1й коэффивдент зависит от соотношения г дайн свободных участков 6 и 7 стержней и растет с приближением допол1штельного звена 5 к неподвижному звену 3 при неизменной общей длине стержней 4 механизма, достигая значений в несколько тысяч и более. Таким образом, исполнительный элемент 8, помещен ный на дополнительное звено 5, меньше воспринимает погрешности привода (не показан) и может повернуться на малый угол с точностью, превышающей точность известных систем в несколько раз. В частном случае зто легко представить при расположении дополнительного звена 5 ровно посередине между неподвижным 3 и подвижным 2 звень ями, в этом случае дополнительное звено 5 повернется на угол в два раза меньший угла поворота подвижного звена 2 и тем самым погрешности передачи угла привода могут быть увеличены вдвое, либо точность механизма повыщена вдвое. В ряде случаев, когда передаточный механизм должен передать вращение нескольким исполнительным элементам 8 на различные углы, можно между подвижным 2 и неподвижным 3 звеньями установить несколько дополнительных звеньев 5 на расстояниях от неподвижного звена 3, определяемых требуемым передаточным коэффициентом. Использование изобретения позволяет в связи с введением дополнительного звена получить новый положительный эффект за счет резкого увеличения передаточной функции. Упругий передаточный механизм позволяет решить задачи точных вращений на малые углы За счет использования обычных приводов, а не прецизионных. Стабильность положения оси вращения дополнительного звена 5 с исполнительным элементом 8 позволяет использовать упругие системы вращательного типа в лазерной спектроскопии и в спектральных приборах сверхвысокого разрешения, где требуется с малым усилием тонко и точно повернуть оптический исполнительный элемент на малый угол. Формула изобретения 1.Упругий передаточный механизм вращательного типа, содержащий корпус, соосно расположенные подвижное и неподвижное звенья, последнее из которых жестко связано с корпусом, упругие стержни, симметрично расположенные относительно оси враще-, ния по окружности, и привод, отличающийся тем, что, с целью повышения точности углового поворота подвижного звена, он снабжен установленным, между подвижным и неподвижным ; звеньями, по крайней мере, одним дополнительным звеном. 2.Механизм по п. 1, о т л и ч а ю щ и и с я тем, что участки joipyrHX стержней между неподвижным, дополнительным и подвижным звеньями выполнены из материалов с различными параметрами. Источники информации, принятые во внимание при экспертизе 1. Цейтлин Я. М. Упругие кинематические устройства. Л., Машиностроение, 1972, с. 11-14 (прототип).
il
/
iZU
ipm. f
