Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанные недостатки являются результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм, функцию которого выполняет подвижное основание, жестко закрепленное на приводном валу, исполнительный механизм с ведущим звеном, которым служит упомянутое подвижное основание, выходными звеньями с губками для захвата изделий и опорной площадкой с фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма, и привода (патент №2224640 (РФ), опубл. в БИПМ, 2004. - №6 - прототип).
Основным недостатком прототипа является усложненность поворотного движения выходных звеньев исполнительного механизма относительно подвижного основания при вращательном движении последнего относительно опорной площадки с фигурными пазами. Это следует из того, что на границах интервалов движения выходные звенья должны быстро переводиться в положения, обеспечивающие разжатое или сжатое положение губок (разжатое при подходе к границе интервалов, сжатое - при удалении от границы интервалов). Поворотное движение выходных звеньев относительно подвижного основания обеспечивается посредством взаимодействия роликов выходных звеньев с фигурными пазами площадки (имеем кулачковые механизмы с неподвижными кулачками и выходными звеньями поворотного типа). Эффективность работы таких механизмов, как известно, зависит от величины угла давления, при этом чем меньше угол давления, тем выше силовая работоспособность механизма. Однако уменьшение угла давления на участке поворота выходных звеньев относительно подвижного основания обеспечивается путем увеличения дугового пути ролика каждого из выходных звеньев при заданном угле поворота последнего. Следовательно, эффективная работа таких механизмов возможна только при увеличенных габаритах площадки с фигурными пазами. Кроме того, ролики выходных звеньев исполнительного механизма постоянно взаимодействуют с фигурными пазами опорной площадки. Это увеличивает энергозатраты на реализацию процесса передачи изделий, связанные с преодолением сил трения.
Выраженное влияние углов давления на движение выходных звеньев исполнительного механизма в моменты разжатия и сжатия губок снижает частоту повторения рабочих циклов и не способствует точности работы устройства.
Задачей настоящего изобретения является снижение энергозатрат на процесс передачи изделий и повышение точности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном в виде вращающегося стержня и исполнительного механизма с ведущим звеном, профильными копирами и выходными звеньями, последние из которых снабжены губками для захвата изделий и шарнирно связаны с выходным звеном передаточного механизма, и привод, исполнительный механизм выполнен в виде многозвенного механизма, содержащего ведущее звено в виде ползуна, подвижно сопряженного с выходным звеном передаточного механизма, шатуны, каждый из которых шарнирно связан с ведущим ползуном и соответствующим выходным звеном, а профильные копиры смонтированы на границах интервалов рабочего и холостого ходов для взаимодействия с упомянутым ползуном.
Передаточный механизм выполнен в виде зубчато-рычажного механизма, содержащего ведущее звено - зубчатое колесо, жестко закрепленное на валу привода, шестерню, смонтированную на дополнительном валу и сопряженную с упомянутым зубчатым колесом, и выходное звено, жестко закрепленное на свободном конце дополнительного вала перепендикулярно оси вращения дополнительного вала.
Ведущее звено исполнительного механизма выполнено в виде пустотелой призмы с продольным сквозным отверстием для подвижного сопряжения с выходным звеном передаточного механизма, при этом форма и размеры поперечного сечения отверстия в теле призмы соответствуют поперечному сечению выходного звена.
Шарнирная связь шатунов с ведущим ползуном содержит палец, жестко закрепленный на ползуне перепендикулярно оси сквозного отверстия в ползуне, при этом на пальце смонтирован ролик для взаимодействия с профильными копирами.
Ведущее звено исполнительного механизма снабжено силовым упругим элементом, выполненным в виде пружины сжатия, при этом один конец пружины жестко закреплен на выходном звене передаточного механизма, а другой - сопряжен с ведущим звеном исполнительного механизма.
Профильные копиры жестко закреплены на неподвижных стойках, при этом упомянутое закрепление копиров выполнено разъемным.
Взаимодействию ролика ведущего ползуна с любым из профильных копиров соответствует разжатое положение губок, при отсутствии упомянутого взаимодействия пружина приводит ползун в положение, при котором губки оказываются сжатыми.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между ними, которые в совокупности обеспечивают снижение энергозатрат на процесс передачи изделий и повышение точности работы устройства. Устройство с предложенным числом подвижных звеньев и кинематических пар удовлетворяет первому условию работоспособности, т.е. соответствует структурной формуле кинематической цепи

где W - степень подвижности устройства, W=1;
n - число подвижных звеньев: зубчатое колесо, шестерня, ползун, шатун, выходное звено, n=5;
р5 - число низших кинематических пар: зубчатое колесо-стойка, шестерня-стойка, ползун - выходное звено передаточного механизма, ползун-шатун, шатун - выходное звено исполнительного механизма, выходное звено исполнительного механизма - выходное звено передаточного механизма, р5=6;
р4 - число высших кинематических пар: зубчатое колесо-шестерня, ролик ползуна - профильный копир, р4=2.
В отличие от прототипа в заявляемом устройстве выходные звенья исполнительного механизма взаимодействуют с профильными копирами лишь на границах интервалов движения. Этим исключаются потери на трение ролика ведущего ползуна при рабочем и холостом ходах. У прототипа ролики выходных звеньев взаимодействуют с фигурными пазами постоянно. В результате увеличиваются энергозатраты на преодоление сил трения, ускоряется износ рабочих профилей пазов. Износ профилей приводит к ошибкам положения и движения звеньев, снижает точность работы устройства. Кроме того, выполнение фигурных профилей в виде конструктивных элементов, взаимодействующих с ведущим звеном исполнительного механизма лишь на границах интервалов движения, упрощает конструкцию, повышает технологичность изготовления, сборки и регулировки фигурных профилей, уменьшает их металлоемкость.
Выполнение передаточного механизма в виде зубчато-рычажного механизма с ведущим звеном в виде зубчатого колеса обеспечивает вращательное движение выходного звена, с которым подвижно сопряжено ведущее звено исполнительного механизма и шарнирно связаны выходные звенья с губками. Такой механизм отличается точностью работы и способностью передавать значительные силовые нагрузки. Механизм соответствует условию работоспособности по структуре кинематической цепи

где W - степень подвижности механизма, W=1;
n - число подвижных звеньев: зубчатое колесо, шестерня с жестко закрепленным на дополнительном валу выходным звеном, n=2;
р5 - число низших кинематических пар: зубчатое колесо-стойка, шестерня-стойка, р5=2;
р4 - число высших кинематических пар: зубчатое колесо-шестерня, р4=1.
Выполнение ведущего звена исполнительного механизма в виде пустотелой призмы принято исходя из условий необходимости подвижного сопряжения с выходным звеном передаточного механизма и шарнирной связи с шатунами посредством пальца. Выполнение звена в виде призмы является предпочтительным с учетом технологичности изготовления, простоты сборки и разборки.
Выполнение шарнирной связи шатунов с ведущим ползуном посредством пальца, жестко закрепленного на призме, является предпочтительным решением исходя из простоты и надежности такой связи. Кроме того, палец в системе упомянутой шарнирной связи является носителем ролика для связи ведущего ползуна с профильными копирами. Следовательно, палец выполняет две функции.
Силовой упругий элемент в сопряжении ведущего ползуна исполнительного механизма с выходным звеном передаточного механизма, выполненный в виде пружины сжатия, обеспечивает при рабочем и холостом ходах устройства такое положение ведущего ползуна, которому соответствует сжатое положение губок. В позициях «схват изделия» и «выдача изделия», т.е. на границах и вблизи границ интервалов движения, упомянутая пружина сжатия обеспечивает силовое замыкание высшей кинематической пары: ролик ведущего ползуна - рабочий профиль копира. Использование силового упругого элемента позволило уменьшить число подвижных звеньев в схеме исполнительного механизма.
Разъемное закрепление профильных копиров на неподвижных стойках принято с учетом обеспечения простоты их монтажа и наладки.
Текущие положения ведущего ползуна исполнительного механизма на выходном звене передаточного механизма определяются взаимодействием ролика ползуна с профильными копирами, а при отсутствии такого взаимодействия - действием на ползун пружины сжатия. Таким образом, поступательное движение ведущего ползуна по выходному звену передаточного механизма обеспечивается посредством пружины сжатия и профильных копиров. Из этого следует, что поступательное движение ведущего звена исполнительного механизма генерируется простыми конструктивными средствами.
Предлагаемое устройство типа «рука» для передачи изделий поясняется чертежами.
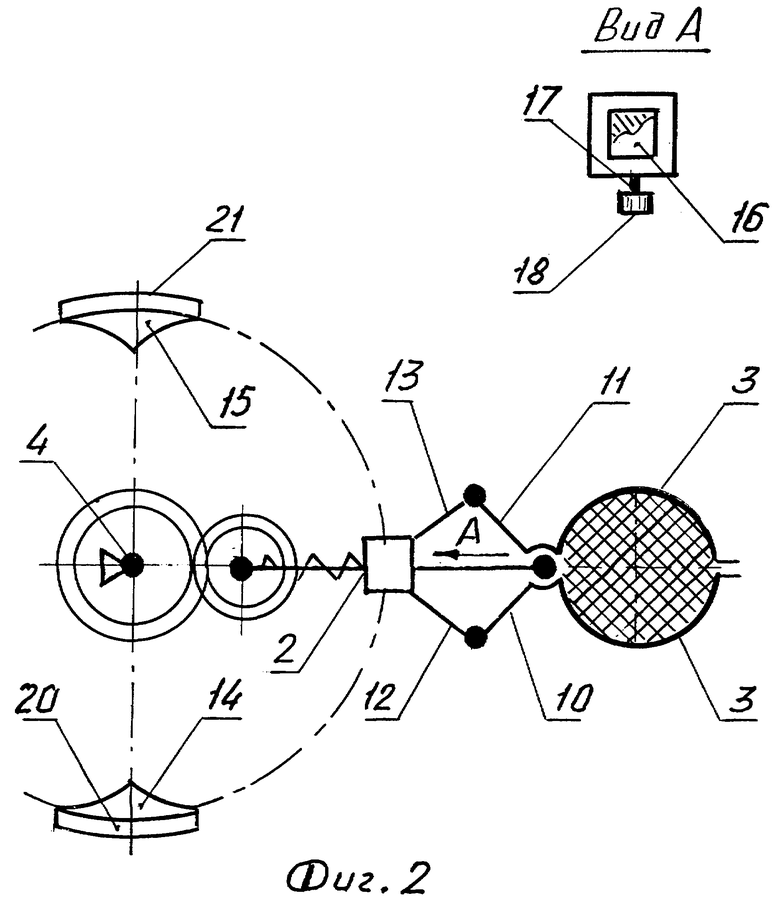
На фиг.1 представлена кинематическая схема устройства; на фиг.2 - то же, вид сверху.
Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма 1 и исполнительного механизма 2 с губками 3 для захвата изделий, и привод 4.
Механизм 1 содержит ведущее звено - зубчатое колесо 5, закрепленное на валу привода 4, шестерню 6, закрепленную на дополнительном валу 7 и сопряженную с упомянутым зубчатым колесом, и выходное звено 8, выполненное в виде стержня, жестко закрепленного на конце дополнительного вала 7, перпендикулярно оси вращения последнего.
Механизм 2 выполнен в виде рычажно-кулачкового механизма, который включает ведущее звено-ползун 9, подвижно сопряженный с выходным звеном передаточного механизма, выходные звенья 10 и 11, шарнирно связанные с выходным звеном 8, шатуны 12 и 13, каждый из которых шарнирно связан с ведущим ползуном 9 и соответствующим выходным звеном, и профильные копиры 14 и 15.
Ведущее звено 9 выполнено в виде пустотелой призмы с продольным сквозным отверстием 16 для подвижного сопряжения с выходным звеном 8. Форма и размеры поперечного сечения отверстия в теле призмы соответствуют поперечному сечению выходного звена 8. Шарнирная связь шатунов 12 и 13 с ведущим ползуном 9 содержит палец 17, жестко закрепленный на ползуне перпендикулярно оси сквозного отверстия в ползуне. На пальце 17 смонтирован ролик 18 для взаимодействия с профильными копирами 14 и 15.
Исполнительный механизм 2 снабжен силовым упругим элементом 19, выполненным в виде пружины сжатия. Один конец пружины жестко закреплен на выходном звене 8, другой ее конец сопряжен с ведущим ползуном 9. Профильные копиры 14 и 15 жестко, но разъемно закреплены на неподвижных стойках 20 и 21, установленных на границах рабочего и холостого ходов.
Устройство типа «рука» для передачи изделий работает следующим образом.
При работе привода 4 вращение ведущего зубчатого колеса 5 преобразуется во вращательное движение выходного звена 8. При нахождении звена 8 в позициях «схват изделия» или «выдача изделия» ролик 18 ведущего ползуна 9 взаимодействует с профильным копиром 14 или 15, при этом упомянутый ползун приводит шатуны 12 и 13 и выходные звенья 10 и 11 в положения, при которых губки 3 для захвата изделий занимают разжатое положение. При рабочем или холостом ходах ролик 18 ведущего ползуна не взаимодействует с профильными копирами, при этом ползун 9 под действием пружины 19 перемещается в положение, при котором губки сжимаются.
В интервале рабочего хода устройства губки, занимая сжатое положение, удерживают изделие, переносимое из позиции «схват изделия» в позицию «выдача изделия». По завершении рабочего хода губки разжимаются и перестают удерживать изделие, при этом последнее выводится из устройства. Холостой ход выполняется при сжатом положении губок, но без изделия.
Предложенное устройство имеет в сравнении с прототипом более технологичную конструкцию, реализует процесс при меньших энергозатратах на трение, обеспечивает точность передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2245781C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма в виде зубчато-рычажного механизма с выходным звеном в виде вращающегося стержня и исполнительного механизма с ведущим звеном, профильными копирами и выходными звеньями, последние из которых снабжены губками для захвата изделий и шарнирно связаны с выходным звеном передаточного механизма, и привод. Исполнительный механизм выполнен в виде многозвенного механизма, содержащего ведущее звено в виде ползуна, подвижно сопряженного с выходным звеном передаточного механизма, шатуны, каждый из которых шарнирно связан с ведущим ползуном и соответствующим выходным звеном. Профильные копиры смонтированы на границах интервалов рабочего и холостого ходов для взаимодействия с упомянутым ползуном. Шарнирная связь шатунов с ведущим ползуном содержит палец, жестко закрепленный на ползуне перпендикулярно оси сквозного отверстия в ползуне, при этом на пальце смонтирован ролик для взаимодействия с профильными копирами. Ведущее звено исполнительного механизма снабжено силовым упругим элементом, выполненным в виде пружины сжатия, при этом один конец пружины жестко закреплен на выходном звене передаточного механизма, а другой - сопряжен с ведущим звеном исполнительного механизма. Изобретение позволит снизить энергозатраты на передачу изделий и повысить точностью работы устройства. 6 з.п. ф-лы, 2 ил.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| US 5885052 A, 23.03.1999. | |||

