Изобретение относится к механизмам со сложным движением выходных звеньев, применяемым для выполнения операций при обслуживании машин и оборудования. Такие механизмы обеспечивают захват изделия, его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основными недостатками данного устройства являются усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, содержащее комбинированный механизм, выполненный в виде подвижных оснований, исполнительных механизмов с ведущими и выходными звеньями, последние из которых снабжены губками для захвата изделий, каждое подвижное основание выполнено в виде ведущего звена соответствующего исполнительного механизма, и привод (патент №2224640 (РФ), опубл. в БИПМ, 2004. - №6 - прототип).
Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является невысокая точность выполнения операций «схват изделия» и «выдача изделия», ограничивающая скорость подвижных оснований и снижающая фактическую производительность устройства.
Точность выполнения упомянутых операций «схват» и «выдача» изделий в составе прототипа низкая, поскольку эти операции выполняются на ходу, т.е. в процессе движения выходных звеньев с губками. Уменьшение же скорости подвижных оснований с целью повышения качества и надежности операций сопровождается уменьшением частоты повторения рабочих циклов и снижением производительности устройства.
Задачей настоящего изобретения является повышение качества и надежности выполнения операций «схват» и «выдача» изделий и повышение производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве для передачи изделий, содержащем комбинированный механизм, выполненный в виде исполнительных механизмов с ведущими и выходными звеньями, ведущие звенья которых кинематически связаны с валом привода, а выходные звенья снабжены губками для захвата изделий, и опорной площадки, кинематическая связь ведущих звеньев с валом привода включает передаточный механизм с выходным звеном, совершающим вращательные движения с остановками, положения последних соответствуют положениям выходных звеньев исполнительных механизмов на границах ходов с установленными на каждой из границ раздвижными клиньями.
Передаточный механизм выполнен в виде зубчатого механизма, ведущее зубчатое колесо которого связано с валом привода, а ведомое колесо укреплено на оси вращения ведущих звеньев исполнительных механизмов.
Диаметр делительной окружности ведущего зубчатого колеса соответствует выражению
 ,
,
где D1 - диаметр делительной окружности ведущего зубчатого колеса;
D2 - диаметр делительной окружности ведомого зубчатого колеса;
S - длина дуги делительной окружности ведущего зубчатого колеса на каждом из участков, не имеющем зубьев.
Ведомое зубчатое колесо снабжено фиксаторами, обеспечивающими выстои колеса на границах ходов выходных звеньев исполнительных механизмов.
Включение в кинематическую связь ведущих звеньев исполнительных механизмов с валом привода передаточного механизма с выходным звеном, совершающим вращательные движения с остановками определенной продолжительности, имеет свои преимущества. Зубчатый передаточный механизм обеспечивает при минимальном числе подвижных звеньев (два звена) движение ведущих и выходных звеньев исполнительных механизмов с остановками определенной (заданной) продолжительности. При этом учтено, что зубчатые механизмы достигают высокой точности перемещений и положений звеньев, эффективно работают при передаче силовых нагрузок.
Зубчатый передаточный механизм компактен, он легко вписывается в кинематическую схему устройства для передачи изделий. Ведомое зубчатое колесо, совершающее выстои на границах ходов, жестко и соосно связано с ведущими звеньями исполнительных механизмов устройства.
Зубчатые колеса передаточного механизма имеют разные диаметры делительных окружностей. Диаметр D1 делительной окружности ведущего колеса больше диаметра D2 ведомого колеса на величину  . Иначе говоря, длина делительной окружности ведущего колеса больше длины окружности ведомого на величину 2·S, поскольку πD1=πD2+2·S. Ведущее зубчатое колесо имеет два участка, смещенных один относительно другого на 180°, на которых отсутствуют зубья. При работе устройства эти участки поочередно исключают взаимодействие ведущего и ведомого колес, обеспечивая выстои (выстаивание) ведомого колеса и ведущих звеньев исполнительных механизмов устройства. Из сказанного следует, что при неравенстве диаметров делительных окружностей ведущего и ведомого колес D1>D2 колеса имеют одинаковое число зубьев одного модуля.
. Иначе говоря, длина делительной окружности ведущего колеса больше длины окружности ведомого на величину 2·S, поскольку πD1=πD2+2·S. Ведущее зубчатое колесо имеет два участка, смещенных один относительно другого на 180°, на которых отсутствуют зубья. При работе устройства эти участки поочередно исключают взаимодействие ведущего и ведомого колес, обеспечивая выстои (выстаивание) ведомого колеса и ведущих звеньев исполнительных механизмов устройства. Из сказанного следует, что при неравенстве диаметров делительных окружностей ведущего и ведомого колес D1>D2 колеса имеют одинаковое число зубьев одного модуля.
Для гарантированного выстоя на границах ходов ведомого зубчатого колеса и жестко связанных с ним ведущих звеньев исполнительных механизмов ведомое колесо снабжено подпружиненными роликовыми фиксаторами. Такая конструкция фиксатора проста, компактна, технологична.
Заявляемое устройство отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения взаимного расположения элементов. Эти отличия способствуют повышению точности работы и производительности устройства.
Предлагаемое устройство поясняется чертежами. На фиг.1 представлена кинематическая схема устройства; на фиг.2 - схема устройства при положении исполнительных механизмов на границах ходов; на фиг.3 - роликовый фиксатор; на фиг.4 - циклограмма.
Устройство для передачи изделий содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2, исполнительных механизмов 3 и 4 с губками 5 для захвата изделий, опорную площадку 6 и привод 7.
Передаточный механизм 2 выполнен в виде зубчатого механизма, ведущее зубчатое колесо 8 которого связано с валом привода 7, а ведомое колесо 9 укреплено на оси 10.
Исполнительные механизмы 3 и 4 выполнены адекватными. Ведущие звенья 11 и 12 соответственно механизмов 3 и 4 выполнены в виде стержней, укрепленных на оси 10 соосно с ведомым зубчатым колесом 9 передаточного механизма. На свободном конце каждого из звеньев 11 и 12 жестко укреплен палец 13 для шарнирной связи с выходными звеньями 14 и 15 с губками 5 для захвата изделий. На выходных звеньях 14 и 15 смонтированы ролики 16 и 17 для взаимодействия с рабочими профилями раздвижных клиньев 18 и 19, при этом раздвижные клинья 18 установлены в позиции «схват изделия», а клинья 19 - в позиции «выдача изделия». Каждое из выходных звеньев 14 и 15 исполнительного механизма снабжено силовым упругим элементом 20, выполненным в виде пружины растяжения, один конец которой укреплен на выходном звене, а другой - на стержне 21, жестко укрепленном на концевой части каждого из звеньев 11 и 12 под прямым углом. На каждом из стержней 21 жестко укреплены упоры 22 и 23 для взаимодействия с выходными звеньями 14 и 15.
Зубчатые колеса передаточного механизма имеют разные диаметры делительных окружностей. Диаметр ведущего колеса 8 больше диаметра ведомого колеса 9, при этом на участках 24 и 25, смещенных один относительно другого на 180°, ведущее колесо не имеет зубьев.
Подпружиненные роликовые фиксаторы 26 (фиг.3) для ведомого зубчатого колеса 9 смонтированы на ведущих звеньях 11 и 12 исполнительных механизмов 3 и 4. Каждый из фиксаторов включает толкатель 27, подвижно сопряженный с ведущим звеном 11 или 12, снабженный роликом 28 и силовым упругим элементом 29 в виде пружины сжатия, и фигурный копир 30 с симметричной рабочей поверхностью, жестко укрепленный на поверхности опорной площадки 6. Копир 30 установлен в позиции «схват изделия», он является единым (общим) для обоих фиксаторов 26.
Подпружиненные роликовые фиксаторы 26 с фигурным копиром 30, имеющим симметричную рабочую поверхность (фиг.3), выполняют две функции: уменьшают величину удара в моменты окончания и начала зацепления колес 8 и 9 и обеспечивают выстаивание ведомого колеса при отсутствии его зацепления с ведущим колесом.
Структура кинематической цепи передаточного механизма соответствует формуле Чебышева, определяющей первое условие работоспособности механизма,
W=3·n-2p5-p4=3·2-2·2-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев (ведущее и ведомое колеса), n=2;
р5 - число низших кинематических пар, р5=2;
р4 - число высших кинематических пар (сопряжение колес), р4=1.
Оценивая работоспособность любого из исполнительных механизмов устройства, соответственно получаем
W=3·n-2р5-р4=3·2-2·2-1=1,
где W - степень подвижности исполнительного механизма, W=1;
n - число подвижных звеньев (ведущее звено 11 или 12, выходное звено 14 или 15), n=2;
р5 - число низших кинематических пар, р5=2;
р4 - число высших кинематических пар (сопряжение выходного звена с рабочим профилем раздвижного клина посредством ролика), р4=1.
Оценивая работоспособность предлагаемого устройства в целом получаем
W=3·n-2p5-p4=3·3-2·3-2=1,
где W - степень подвижности устройства, W=1;
n - число подвижных звеньев (ведущее колесо 8, ведомое колесо 9 в жесткой связи с ведущим звеном 11 или 12, выходное звено 14 или 15), n=3;
р5 - число низших кинематических пар, р5=3;
р4 - число высших кинематических пар, р4=2.
Форма губок 5 соответствует форме передаваемых изделий. При захвате и переносе изделий обеспечивается сопряжение губок с изделием по большей части периметра последнего. Губки укреплены на выходных звеньях 14 и 15 жестко, но разъемно.
Опорная площадка 6 выполнена в виде круглого стола с полированной плоской рабочей поверхностью, укрепленного на ножках с резьбовыми муфтами для регулирования положения стола по высоте при установке и переналадке устройства. В центре стола выполнено круговое отверстие 31 для упрощения монтажа и наладки передаточного механизма. Диаметр опорной площадки выбирают с учетом условий использования устройства. Если предполагается применение устройства для передачи изделий повышенной массы, то предпочтительными будут размеры стола, при которых губки с изделиями будут совершать круговые движения над поверхностью стола. В таких условиях можно обеспечить контакт переносимого изделия с поверхностью стола. Это исключит упругие деформации звеньев 11 и 12 и повысит точность работы устройства.
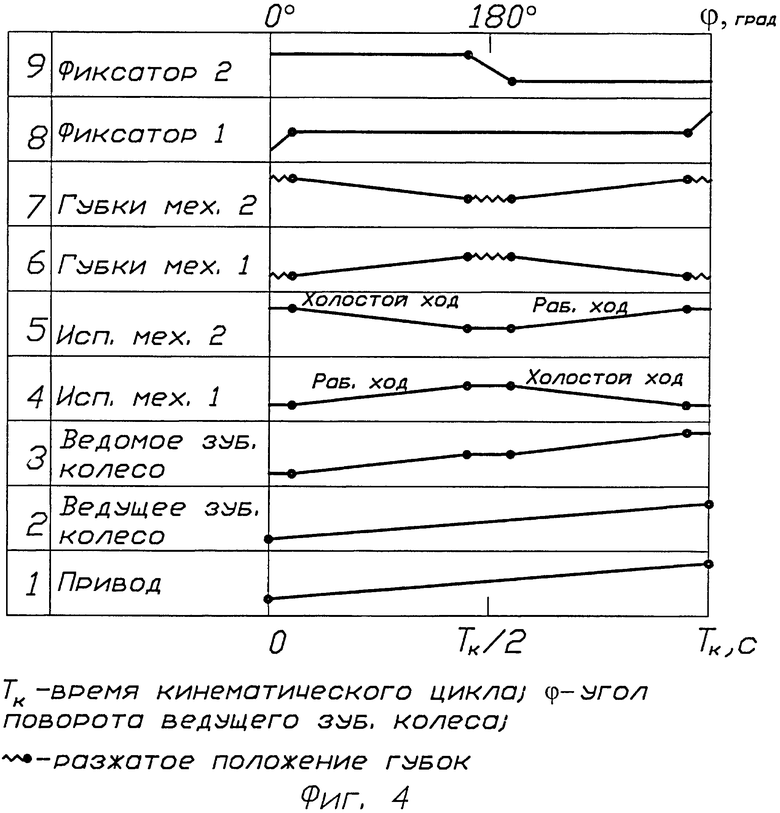
Устройство для передачи изделий работает следующим образом (см. фиг.4).
При работе привода 7 вращение ведущего зубчатого колеса 8 преобразуется посредством ведомого колеса 9 во вращательное движение ведущих звеньев исполнительных механизмов 3 и 4. В периоде кинематического цикла, равного времени одного оборота колеса 8, ведомое колесо 9 и жестко связанные с ним ведущие звенья 11 и 12 исполнительных механизмов, совершают два выстоя, которые возникают на границах ходов звеньев 11 и 12 в результате отсутствия зубьев на двух участках делительной окружности колеса 8. Другими словами, через каждые 180° поворота, т.е. в позициях «схват изделия» и «выдача изделия» ведомое колесо выстаивает, обеспечивая выстаивание выходных звеньев 14 и 15 исполнительных механизмов, при этом губки 5 оказываются в разжатом положении, поскольку на границах ходов ролики 16 и 17 выходных звеньев взаимодействуют с рабочими профилями раздвижных клиньев соответственно 18 или 19. В позиции «схват…» в разжатые губки подается изделие, а в позиции «выдача…» изделие выводится из устройства, эти операции совмещены во времени. Исполнительные механизмы 3 и 4 при работе устройства поочередно выстаивают в позициях «схват изделия» и «выдача изделия».
В моменты, когда ведущее колесо 8 перестает взаимодействовать с ведомым колесом 9, толкатель 27 фиксатора 26 входит в сопряжение с рабочим профилем фигурного копира 30, при этом пружина 29 обеспечивает взаимодействие ролика 28 с минимальным радиусом-вектором копира, в результате чего обеспечивается фиксированное положение ведомого колеса 9 и ведущих звеньев исполнительных механизмов. Фиксаторы, укрепленные на ведущих звеньях 11 и 12, действуют поочередно аналогичным образом.
По окончании выстоя, т.е. в момент начала зацепления колес 8 и 9, ролик 28 перестает взаимодействовать с рабочим профилем копира 30 и в интервале поворота колеса 9 на 360° ролик фиксатора «зависает» над опорной площадкой 6. После поворота ведомого колеса 9 на 180° аналогичным образом срабатывает фиксатор, укрепленный на другом ведущем звене.
Предложенное конструктивное выполнение устройства для передачи изделий позволяет повысить точность выполнения операций, составляющих процесс передачи изделий, и производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2012 |
|
RU2521934C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |


Изобретение относится к механизмам со сложным движением выходных звеньев, применяемым при обслуживании работы технологических машин, станков, прессов и т.п. Устройство содержит два исполнительных механизма, передаточный механизм, опорную площадку и привод. Исполнительные механизмы содержат ведущие и выходные звенья. Ведущие звенья исполнительных механизмов кинематически связаны с валом привода, а выходные звенья снабжены губками для захвата изделий. Кинематическая связь ведущих звеньев с валом привода включает передаточный механизм. Передаточный механизм выполнен в виде зубчатого механизма с ведущим зубчатым колесом, связанным с валом привода, и ведомым зубчатым колесом, укрепленным на оси вращения ведущих звеньев исполнительных механизмов и совершающим вращательные движения с остановками. Положения остановок соответствуют положениям выходных звеньев исполнительных механизмов на границах ходов с установленными на каждой из границ раздвижными клиньями для взаимодействия с выходными звеньями исполнительных механизмов. Изобретение позволяет повысить точность выполнения операций и повысить производительность. 2 з.п. ф-лы, 4 ил.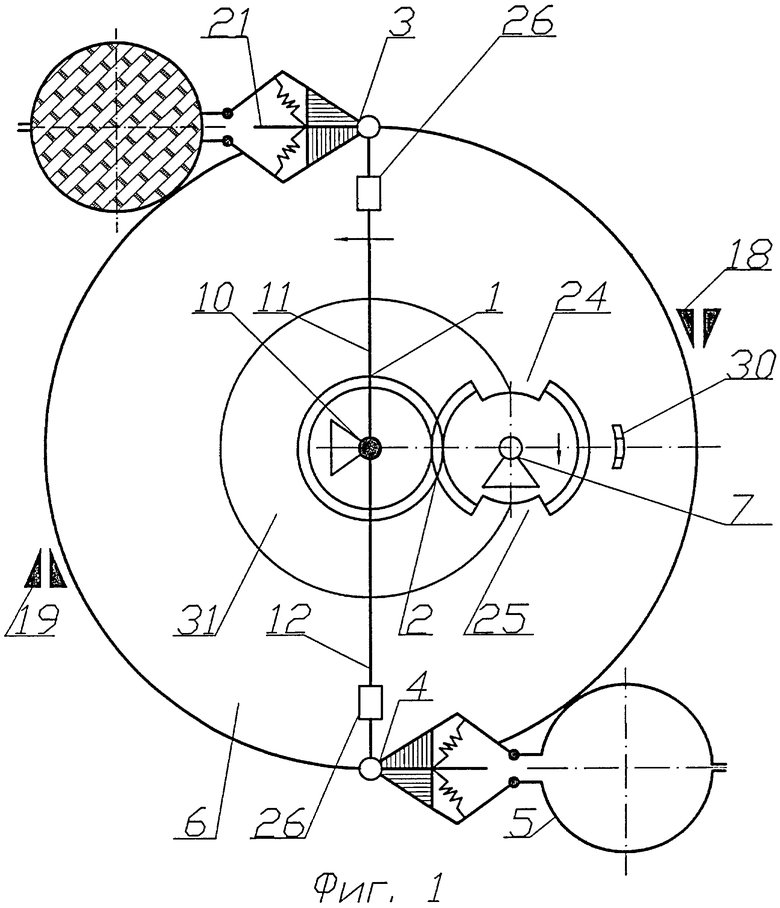
1. Устройство для передачи изделий, содержащее комбинированный механизм, выполненный в виде двух исполнительных механизмов с ведущими и выходными звеньями, ведущие звенья которых кинематически связаны с валом привода, а выходные звенья снабжены губками для захвата изделий, и опорной площадки, отличающееся тем, что кинематическая связь ведущих звеньев с валом привода включает передаточный механизм, выполненный в виде зубчатого механизма с ведущим зубчатым колесом, связанным с валом привода, и ведомым зубчатым колесом, укрепленным на оси вращения ведущих звеньев исполнительных механизмов и совершающим вращательные движения с остановками, положения которых соответствуют положениям выходных звеньев исполнительных механизмов на границах ходов с установленными на каждой из границ раздвижными клиньями для взаимодействия с выходными звеньями исполнительных механизмов.
2. Устройство по п.1, отличающееся тем, что диаметр делительной окружности ведущего зубчатого колеса соответствует выражению
 ,
,
где D1 - диаметр делительной окружности ведущего зубчатого колеса;
D2 - диаметр делительной окружности ведомого зубчатого колеса;
S - длина дуги делительной окружности ведущего зубчатого колеса на каждом из участков, не имеющем зубьев.
3. Устройство по п.1 или 2, отличающееся тем, что ведомое зубчатое колесо снабжено фиксаторами, обеспечивающими выстои колеса на границах ходов выходных звеньев исполнительных механизмов.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224640C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2376130C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224641C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| US 5885052 A, 23.03.1999. | |||

