Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С. 9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с губками для захвата изделий, передаточный механизм и привод (патент 2172240 РФ), опубл. в Б.И. и П.М., 2001. - 23 - прототип).
Основным недостатком прототипа является неравномерность движения звеньев при рабочих и холостых ходах и невысокая производительность. Работа передаточного механизма устройства сопровождается мягкими ударами (на границах интервалов рабочего и холостого ходов) и ускорениями внутри интервалов движения, генерирующими появление сил инерции. Возникающие при этом динамические нагрузки исключают возможность уменьшения периода рабочего цикла и повышения производительности устройства.
Задачей настоящего изобретения является устранение динамических нагрузок и повышение производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с выходными звеньями и губками для захвата изделий, и привод, передаточный механизм содержит неподвижный кулачок, а выходное звено выполнено в виде ведущего звена исполнительного механизма, при этом выходное звено подвижно сопряжено с ведущим звеном и связано с упомянутым кулачком.
Ведущее звено передаточного механизма выполнено в виде стержня, жестко закрепленного на валу привода, а неподвижный кулачок совмещен с упомянутым звеном, при этом центр кулачка совпадает с центром вращения звена.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом крепление губок к звеньям выполнено разъемным.
Подвижное сопряжение ведущего и выходного звеньев передаточного механизма содержит, по меньшей мере, две призмы, жестко закрепленные на одном из звеньев, при этом в каждой призме выполнено сквозное продольное отверстие для сопряжения с другим упомянутым звеном.
Комбинированный механизм снабжен раздвижными клиньями для взаимодействия с выходными звеньями исполнительного механизма, при этом в боковинах клиньев выполнены продольные фигурные пазы.
Неподвижный кулачок выполнен с симметричным профилем относительно оси между интервалами сближения и удаления, при этом на упомянутых интервалах профиль кулачка выполнен в виде Архимедовой спирали.
Выходное звено передаточного механизма содержит ролик для взаимодействия с неподвижным кулачком и палец для шарнирной связи с выходными звеньями исполнительного механизма, жестко закрепленный на свободном конце звена.
На свободных концах выходных звеньев исполнительного механизма смонтированы ролики для взаимодействия с продольными пазами раздвижных клиньев.
Раздвижные клинья жестко закреплены на стойках и размещены на границах интервалов сближения и удаления выходных звеньев исполнительного механизма.
Устройство снабжено склизом, установленным в позиции выдачи изделий.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, которые обеспечивают исключение динамических нагрузок, дают возможность для уменьшения периода рабочего цикла и повышения производительности устройства. В предлагаемом устройстве кулачок передаточного механизма и раздвижные клинья исполнительного механизма не совершают какого-либо движения. Ведущее и выходное звенья передаточного механизма совершают вращательное движение с постоянной скоростью. Поступательное движение выходного звена, сопряженного с неподвижным кулачком, профиль которого выполнен в виде Архимедовой спирали, также реализуется при постоянной скорости. Кроме того, в предлагаемом устройстве в отличие от прототипа нет системы гибкой связи между механизмами. Этим определяются существенные преимущества предлагаемого устройства.
Предложен передаточный механизм с предельно простой структурой кинематической цепи. Механизм имеет два подвижных звена (ведущее и выходное), при этом выходное звено совершает сложное движение - вращательное - вместе с ведущим звеном и возвратно-поступательное параллельно ведущему звену. Такой механизм удовлетворяет структурной формуле кинематической цепи, т.е. первому условию работоспособности
W=3•n-2p5-р4=3•2-2•2-1=1,
где W - степень подвижности механизма;
n - число подвижных звеньев, n=2;
р5 - число низших кинематических пар, p5=2;
р4 - число высших кинематических пар, р4=1.
Очевидно, что в интервале кинематического цикла (времени полного оборота ведущего звена) каждая точка выходного звена будет совершать движение по замкнутой плоской кривой. Поскольку выходное звено передаточного механизма выполнено в виде ведущего звена исполнительного механизма, оно будет генерировать движение выходных звеньев с губками для захвата изделий по замкнутой плоской траектории. Сочетание кругового и поступательного движений выходных звеньев относительно механизма во многих случаях оказывается более предпочтительным для реализации процесса передачи изделий по сравнению с движением губок по линиям (прямым или кривым).
Совмещение центра вращения ведущего звена передаточного механизма с центром неподвижного кулачка (с центром базовой окружности) значительно упрощает возможность компоновки выходного звена в виде центрально расположенного толкателя. Это позволяет использовать кулачок с симметричным рабочим профилем в интервалах подъема и опускания выходного звена. При равнозначных профилях кулачка для интервалов подъема и опускания толкателя это обеспечивает одинаковую силовую работоспособность в обоих интервалах и открывает возможность использования любого из интервалов в качестве рабочего хода.
Разъемное крепление губок к выходным звеньям исполнительного механизма повышает их технологичность при переналадке устройства на передачу изделий другой формы.
Призмы в сопряжении подвижных звеньев передаточного механизма выполняют функции направляющих. Использование в сопряжении не менее двух призм исключает перекосы звеньев и обеспечивает их параллельность относительно друг друга. Призмы предпочтительно крепить (жестко) к ведущему звену передаточного механизма. При этом исключается необходимость перемещения призм вдоль ведущего звена. При жесткой компоновке призм на выходном звене они будут совершать возвратно-поступательные движения вместе с выходным звеном, увеличивая энергозатраты на движение масс. Сквозные продольные отверстия в теле призм необходимо выполнять фигурными (по форме поперечного сечения выходного звена), исключающими возможность разворота выходного звена относительно его продольной оси.
В нормальном положении устройства выходные звенья исполнительного механизма оказываются зафиксированными относительно друг друга посредством пружины, при этом губки для захвата изделий занимают сжатое положение. В позициях "схвата" и выдачи изделия губки переводятся в разжатое положение. Это достигается посредством взаимодействия выходных звеньев с раздвижными клиньями, смонтированными на границах интервалов рабочего и холостого ходов, т.е. в позициях "охвата" и выдачи изделия.
Выполнение профиля неподвижного кулачка симметричным относительно оси между интервалами сближения и удаления как и выполнение профиля в виде Архимедовой спирали дает возможность реализовать движение выходного звена с постоянной скоростью как при рабочем, так и при холостом ходах. Это исключает инерционные нагрузки, снижает энергозатраты, дает возможность интенсифицировать процесс передачи изделий.
Оснащение выходного звена передаточного механизма роликом для сопряжения с неподвижным кулачком замедляет износ рабочего профиля кулачка и таким образом уменьшает искажение реализуемого закона движения выходного звена. Жесткое крепление пальца на свободном конце выходного звена обеспечивает надежную шарнирную связь выходных звеньев передаточного и исполнительного механизмов.
Ролики на свободных концах выходных звеньев исполнительного механизма, взаимодействующие с продольными пазами раздвижных клиньев, исключают возможность перекоса выходных звеньев при их взаимодействии с клиньями, уменьшают износ пазов, повышают точность разжатия и сжатия губок для захвата изделий.
Раздвижные клинья с продольными пазами для роликов занимают фиксированное (неподвижное) положение на границах интервалов рабочего и холостого ходов выходных звеньев с губками. Клинья выполнены фигурными: в моменты начала и окончания контакта роликов с продольными пазами клиньев губки занимают сжатое положение. Разжатие и сжатие губок происходит в процессе взаимодействия роликов с пазами клиньев, т.е. при движении роликов в пазах.
Склиз выполнен в виде фигурной корытообразной поверхности для отвода изделий из позиции их выдачи при разжатии губок. Целесообразность применения склиза возникает в ряде случаев, например при высокой производительности устройства, при отсутствии быстродействующего приспособления для отвода изделий из позиции выдачи, при передаче изделий удлиненной формы.
Предлагаемое устройство поясняется чертежами. На фиг.1 представлена кинематическая схема устройства; на фиг.2 - вид А на фиг.1; на фиг.3 - неподвижный кулачок; на фиг 4 - вид Б на фиг.1.
Устройство типа "рука" для передачи изделий содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2 и исполнительного механизма 3 с губками 4 для захвата изделий, и привод 5.
Передаточный механизм 2 включает ведущее звено 6, выполненное в виде стержня, жестко закрепленного на валу 7 привода 5, неподвижный кулачок 8, центр которого (центр базовой окружности кулачка) расположен соосно валу 7, и выходное звено 9, выполненное в виде толкателя кулачка 8. Звенья 6 и 9 передаточного механизма подвижно сопряжены посредством двух призм 10 и 11, жестко закрепленных на ведущем звене. В теле каждой призмы выполнено сквозное продольное отверстие для сопряжения ее с выходным звеном 9. Отверстия в теле призм 10 и 11 выполнены фигурными соответственно форме поперечного сечения выходного звена. Это исключает возможность разворота выходного звена относительно его продольной оси. Сопряжение выходного звена 9 с кулачком 8 обеспечивается посредством ролика 12, смонтированного на конце выходного звена.
Исполнительный механизм 3 включает ведущее звено, функцию которого выполняет выходное звено 9 передаточного механизма, выходные звенья 13 и 14 с губками 4 для захвата изделий и раздвижные клинья 15 и 16 с продольными фигурными пазами 17 и 18 на их боковинах. Звенья 13 и 14 шарнирно связаны между собой и со звеном 9 посредством пальца 19, жестко закрепленного на свободном конце упомянутого звена 9. На свободных концах выходных звеньев 13 и 14 смонтированы ролики 20 и 21 для взаимодействия с фигурными пазами 17 и 18 раздвижных клиньев 15 и 16. Исходное положение выходных звеньев 13 и 14, при котором губки 4 занимают сжатое положение, обеспечивается пружиной 22 растяжения. В сжатом положении губок, когда ролики 20 и 21 не взаимодействуют с пазами 17 и 18 раздвижных клиньев, пружина 22 обеспечивает жесткое замыкание выходных звеньев 14 и 15 с пальцем 19.
Раздвижные клинья 15 и 16 смонтированы в позициях "схвата" и выдачи изделий и закреплены на стойках 23 и 24, клинья имеют одинаковое конструктивное исполнение. В позиции выдачи изделий установлен склиз 25 (фиг.1) для гравитационного отвода изделия из позиции после разжатая губок 4 исполнительного механизма.
Неподвижный кулачок 8 (фиг.3) имеет симметричный рабочий профиль относительно оси 26, служащей границей между интервалами сближения или удаления. Профиль упомянутого кулачка выполнен в виде Архимедовой спирали, это дает возможность реализовать движение выходного звена 9 с постоянной скоростью. Кроме того, кулачок с симметричным профилем имеет одинаковую (равнозначную) силовую работоспособность в интервалах сближения и удаления. Это позволяет использовать любой из интервалов профиля в качестве рабочего участка.
Устройство работает следующим образом.
При работе привода 5 ведущее звено 6, закрепленное на валу 7, совершает вращательное движение с постоянной скоростью. При этом выходное звено 9, сопряженное с ведущим звеном посредством призм 10 и 11, также совершает вращательное движение. Кроме того, в результате взаимодействия с неподвижным кулачком 8 выходное звено 8 совершает возвратно-поступательное движение вдоль своей продольной оси. Сложное движение выходного звена 9 в функции ведущего звена исполнительного механизма 3 генерирует движение выходных звеньев 13 и 14 с губками 4 для захвата изделий.
На участках движения устройства в сжатом положении губок 4 пружина 22 обеспечивает жесткое сцепление выходных звеньев 13 и 14 с пальцем 19, при этом звенья 13 и 14 и выходное звено 9 образуют жесткую поворотную систему. При взаимодействии роликов 20 и 21 с фигурными пазами 17 и 18 раздвижных клиньев обеспечивается поворот выходных звеньев 13 и 14 и разжатие (сжатие) губок 4. В период взаимодействия роликов 20 и 21 с пазами клиньев выполняется "схват" изделия (подача изделия в губки) или его выдача на склиз 25.
За период кинематического цикла, равного времени полного оборота ведущего звена 6, устройство совершает рабочий ход - перенос изделия (губки сжаты) и холостой ход - движение сжатых губок без изделия. Процесс взаимодействия роликов 20 и 21 с фигурными пазами 17 и 18 раздвижных клиньев включает три периода: начальный период - разжатие губок; средний период - подача изделия в полностью разжатые губки (или выдача изделия из губок); конечный период - сжатие губок ("схват" изделия или имитация "охвата" без изделия).
В предлагаемом устройстве типа "рука" для передачи изделий звенья комбинированного механизма совершают вращательное и возвратно-поступательное движения с постоянной скоростью. Это значительно снижает ударные нагрузки и способствует повышению производительности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2376130C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224641C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2264907C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331506C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |



Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с выходными звеньями и губками для захвата изделий, и привод. Передаточный механизм содержит неподвижный кулачок, его выходное звено подвижно сопряжено с ведущим звеном, связано с упомянутым кулачком и является ведущим звеном исполнительного механизма. Подвижное сопряжение ведущего и выходных звеньев передаточного механизма содержит, по меньшей мере, две призмы, жестко закрепленные на одном из звеньев, при этом в каждой призме выполнено сквозное продольное отверстие для сопряжения с другим упомянутым звеном. Комбинированный механизм снабжен раздвижными клиньями для взаимодействия с выходными звеньями исполнительного механизма, при этом в боковинах клиньев выполнены продольные фигурные пазы. На свободных концах выходных звеньев исполнительного механизма смонтированы ролики для взаимодействия с продольными пазами раздвижных клиньев. Изобретение позволит устранить динамические нагрузки и повысить производительность. 9 з.п. ф-лы, 4 ил.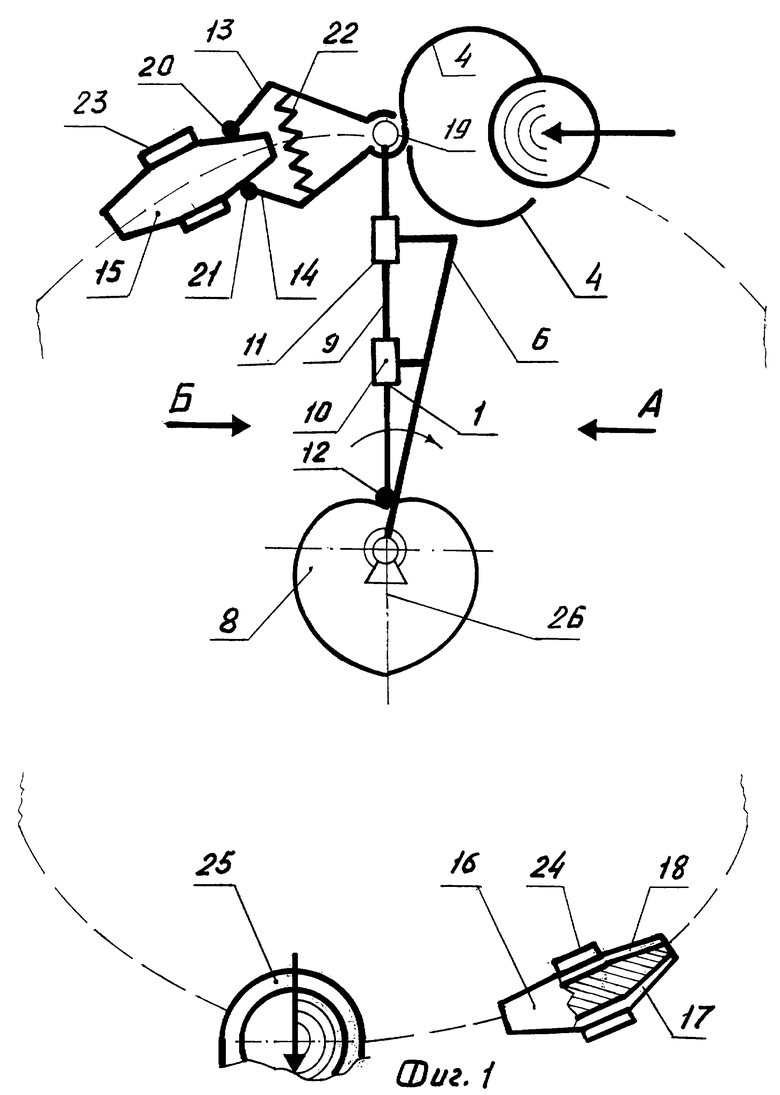
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| US 5885052 А, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

