вым входом второго блока сложения, второй вход которого соединен с выходом первого блока умножения, вьжод второго блока сложения соедин:ен с первым входом регулятора массы,, к второму и третьему входам которого подключены выходы датчика и задатчи- ка массы, выход первого блока определения модуля соединен с первым входом амплитудного детектора, выход которого соединен с первыми входами триггера и первого масштабного блока, к, второму входу которого подключен первый выход триггера,, второй выход которого соединен с первым входом таймера, выход которого соединен с третьим входом вычислителя и первыми входами первого и четвертого блоков сравненияJ выход первого масштабного блока соединен с четвертым входом вычислителя, первый вьжод которого соединен с вторым входом первого блока умножения и третьим входом первого блока памяти, второй выход которого соединен с первыми входами второго и третьего масштабных блоков и первым входом блока формирования вьщержки времени, выход которого соединен с вторым входом амплитудного детектора, второй вькод второго блока умножения соединен с вторыми входами блока формирования выдержки времени и таймера, второй выход вычислителя соединен с четвертым входом первого блока памятрл и вторым входом третьего блока умножения, выход третьего масштабного блока соединен с вторым входом первого блока сравнения5 второй выход которого соединен с вторым входом второго масштабного блока, выход которого соединен с вторым входом четвертого блока сравнения, выход которого соединен с третьими входаки таймера,, амплятудного детектора, первого и четвертого блоков сравнения;s, вторым. входом триггера, четвертым входом логического блока и вторым входом
Изобретение относится к автоматизации процессов измельчения материа5207
первого ключевого элемента, выход которого соединен с третьим входом второго блока памяти и пятым входом логического блока5 а третий вьгход вычислителя соединен с пятым входом первого блока памяти,,
2, Система по п. 1,, о г л и ч а ю - ш, а я с я тем 5 что вычислитель выполнен в виде второго, третьего и четвертого ключевых элементов, четвертого, пятого и шестого блоков умножения, второго и третьего эадатчи- ков опорных сигналов,, первого и второго блоков деления, причем первый вход вычислителя соединен с первыми входами второго,, третьего и четвертого ключевых элементов,, Е;торой вход вычислителя соадинен с вторым входом второго ключевого элемента, третий вход вычислителя соединен с вторым входом четвертого ключевого элементаз четвертьй вход вычислителя соединен с вторым входом третьего ключевого элемента5 выход второго ключевого элемента соединен с первым входом четвертого блока умножения,, к второму входу которого подсоединен выход второго эадатчика опорного сигнала, выход четвертого блока умножения соединен с первым входом первого блока деления, выход которого соединен с первым выходом вычислителя и первым входом шестого блока умножения, к нторому входу которого подсоединен выход третьего задатчика опорного сигнала, выход третьего ключевого элемента соединен с первым входом пятого блока умножения, ВЬЕХОД которого соединен с вторым входом первого блока деления, выход четвертого ключевого элемента соединен с третьим ЗЕл:х:одом зычпслителя, вторьм входом пятог о Злока умножения и первым входом второго блока деленияj к второму входу которого подкльэчен выход шестого блока умнож:ения,. и выход второго блока деления соединен с вторым выходом вычислителя,
ла к может найти применение в черной и цветной металлургии; теплознергети
3
ке, промьшшенности строительных материалов.
Известна система автоматического регулирования загрузки мельницы, содержащая задатчик цеса и установлен- ный на питающем транспортере датчик веса, соединенные через элемент сравнения, регулятор веса с исполнительным механизмом, связанным с питателем, задатчик и датчик уровня загруз ки мельницы, соединенные через элемент сравнения с регулятором загруз- ки 1,
Такое устройство осуществляет форсированную догрузку мельницы до заданного уровня в режиме первоначальной загрузки при перерывах в подаче исходного материала. Это достигается подачей на вход дополнительного регулятора сигнала рассогласования между величиной заполнения мельницы и ее первой производной по времени. При этом настройки регулятора загрузки постоянны как для недогруза, так и для перегруза мельницы, поэтому система в зависимости от настроек регулятора работает либо в двухпозиционном режиме, либо при перегрузке не может вывести из него мельницу.
Наиболее близкой к изобретению является система автоматического регулирования загрузки мельницы, включающая первый,второй и третий блоки сравнения,фильтр,первый,второй и третий блоки умножения,первый и второй блоки сложения, первый задатчик опорного сигнала, первьпй блок сравнения, блок дифференцирования, первый и второй блоки определения модуля сигнала, датчик и задатчик веса, первьм ключевой элемент, датчик и задатчик уровня загрузки, соединенные с входами второго блока сравнения, последовательно соединенные регулятор веса и блок управления двигателем питателя, причем выход блока дифференцирования соединен с входом первого блока определения модуля, а третий блок сравнения подключен к первому входу первого ключевого элемента 2.
Недостатком изв естной системы является низкое качество регулирова- ния, вызванное тем, что при изменении коэффициента усиления в передаточной функции объекта, вызванного изменяющимися технологическими ус
10
15
20
25
55
530
35
40
45
50
55
2074
ловиями измельчения, в системе формируется дискретный коэффициент усиления, принимающий строго фиксированные два значения.
Кроме того, при формировании управляющего воздействия не учитывается изменение динамического коэффициента в передаточной функции объекта. Это приводит к ухудгпенкю качественных и количественных характеристик переходного процесса в замкнутой системе управления и как следствие к уменьшению производительности цикла по готовому продукту.
Целью изобретения является повышение качества регулирования.
Поставленная цель достигается тем, что система автоматического регулирования загрузки мельницы, включающая первый, второй и третий блоки сравнения, фильтр, первый,второй и третий блоки умножения, первый и второй блоки сложения, первый задатчик опорного сигнала, блок дифференцирования, первый и второй блоки определения модуля сигнала, датчик и задатчик массы, первый ключевой элемент, датчик и задатчик уровня загрузки, соединенные с входами второго блока сравнения, последовательно соединенные регулятор массы и блок управления двигателя питателя, причем первый выход блока дифференцирования соединен с входом первого блока определения модуля сигнала, а третий блок сравнения подключен к первому входу первого ключевого элемента, снабжена амплитудным детектором, триггером, первым, вторым и третьим масштабными блоками, первым и вторым блоками памяти, таймером, логическим блоком, блоком формирования выдержки времени, интегратором, четвертым блоком сравнения и вычислителем, причем первый выход первого блока сравнения соединен с первыми входами вычислителя и первого блока памяти, выход второго блока сравнения соединен с входом фильтра, выход которого соединен с первыми входами блока дифференцирования, первого и второго блоков умножения, первого блока сложения, второго блока памяти и второго блока определения модуля, выход которого соединен с первым входом третьего бЛока сравнения, к второму входу которого подсоединен выход первого задатчика onop}ioro сигнала, BTopovi выход блока /:;ифференци- рования соединен с первым входом логического блока и вторым входом 1зто- рого блока памяти, первьп и второй выходы которого соединены :: вторым и третьим входами логического блока, первый выход которого соединен с вторым входом первого блока памяти, пер вьш выход которого соединен вторым входом второго блока .УМНОЖЕНИЯ, к третьему входу которого подсоединен второй ВЕзГход логического блока, первый ВЫХОД второго блока умножеяия соединен с вторыми входами вычислителя и первого блока сложения, зьгход которого соединен с г ервь№ 1 входом третьего блока умножения, выход которого соединен через интегратор с пер вым входом второго блока сложения, второй вход которого соединен с вы- ходом первого блока умножения, второго блока сложения соединен с первым входом регулятора массЫ; к второму и третьему входам которого подключены выходы датчика и задатчи- ка массы, выход первого блока определения модуля соединен с пер)зым вт-со ,дом амплитудного детектора, выход которого соединен с первыми входами триггера и первого масштабного блока к второму входу которого подключен первьй выход триггера, второй выход которого соединен с первым входом таймера, выход которого соединен с третьим входом вычислителя и первыми входами первого и четвертого блоков сравнения, выход первого масштабного блока соединен с четвертым входом вычислителя, первый выход которого соединен с вторым в.ходом первого блока умножения и гретьим входом первого блока памяти нто- рой выход которого соединен с первыми -входами второго и третьего масштабных блоков и пер- вым входом блока (Ьормирова ия выдержки времени, выход которого соединен с вторым входам амплитуд юго детектора, второй выход второго блока умножения соединен с вторь -я входами блока формирования выдержки времени и таймера, второй выход Е1ычислителя соединен с четвертым входом первого блока памяти и вторым входом третьего блока умножения, вы- ход третьего масштабного блока соединен с вторым входом первого блока сравнения, второй выход которого
,; 5 0 5 о 0
5
5
0
07i
соединен с зторым входом второго масштабного блокаj выход которого соединен со вторы -- входом четвертого блока сравнения, зыход которого соединен с третьими входами тайг-1е- ра,, амплитудного детектора, первого и четвертого блоков сравнения, BTOpbri i входом триггера-, чет- вертьп-f входом логического блока, и вторым входоь- первого ключевого элемента, выход которого соединен с третьим входом liToporo блока памяти и пятым входом логического блока, а третий выход вычислителя соединен с пятым входом ггервого блока памяти. Кроме TorOj вычислитель выполнен в виде второго, Т эетьего и четверто- - о ключевых элементов, четвертого,, пятоп.) и шестого блоков умножения пторого и третьего задатчиков опорных сигнало:55 первого и второго блоков деления J первьй вход вы- гисли геля соединен с первыми входами второго, третьего и четвертого ключевых элементов, второй вход вычис- . тителя соединен с вторым входом второго ключевого эле .мента, третий вход вычислителя соединен с вторым входом гетвертого ключевого элемента, чет- зертьК вход 1эычкслителя соединен с вторым входом третьего ключевого эле- |-1ента, выход вт рс1го ключевого эле- 4ента соеди И;н с первым входом чет- HepToi o блока умножения,, к второму 1ВХОДУ которого ::одсоедиЕ1ен выхо/: вто- 5ого задатчярса оперного сигнала, выход четвертого блока умножения сое ,:|;инен с первым входом первого блока деления, вьгхол которого соединен с первым выходом вычислителя и первым входом шестсг о блока умножения:, к пторому вхол.у когсрого подсое;ги} ен выход третьег о задатчика опорного сигнала, выход третьего клгчзчезого э.иемента совл.инен с первым входом )с блока умножения,, выход которого соединен с вторым входом первого блока деления, выход четвертого 1,пючево1 о элемента соединен с третьим Bb xo;i;oM вычислителя, вторым входом пятого блока умножения и первым входом второго блока деления, к второму входу которого подключен нход шестого блока умножения, а ;:ыход второго блока деления соединен с вторым выхоцом вычислителя.
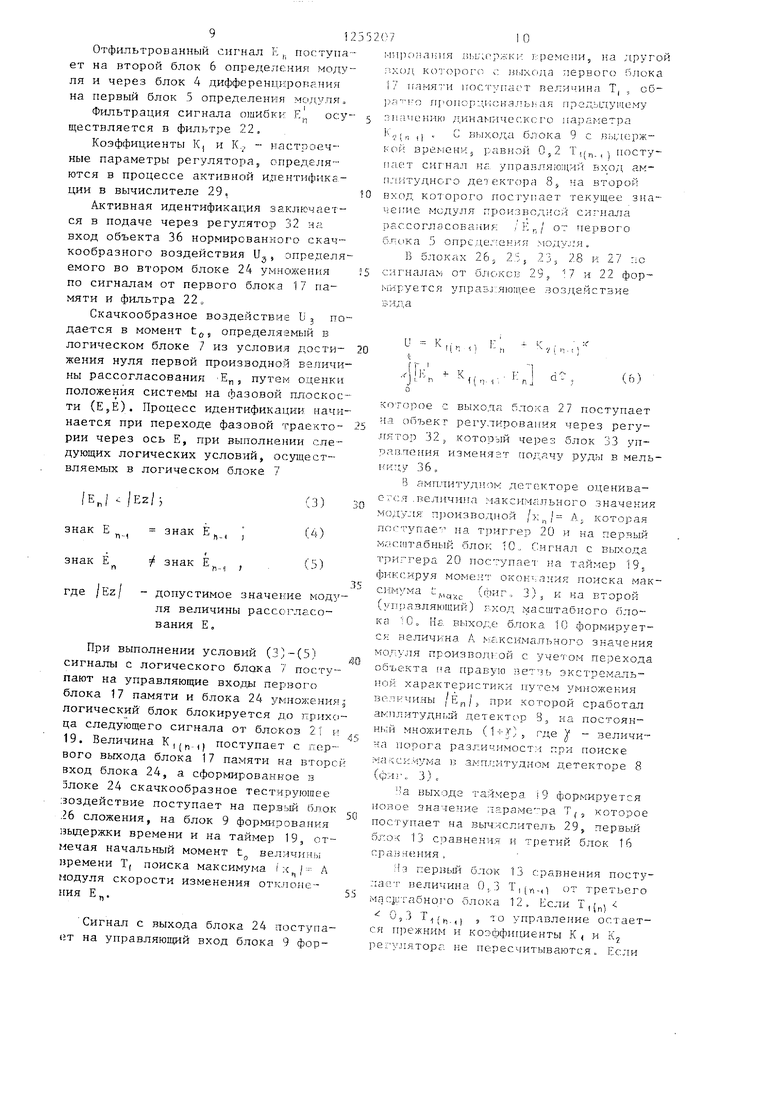
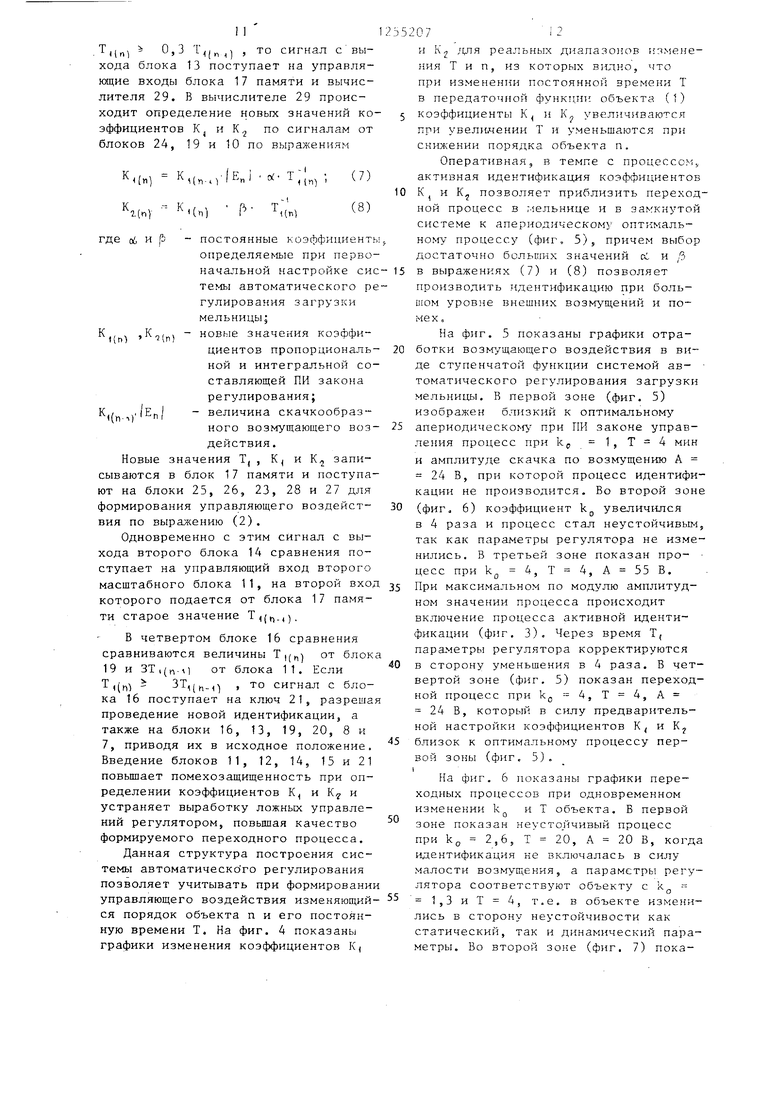
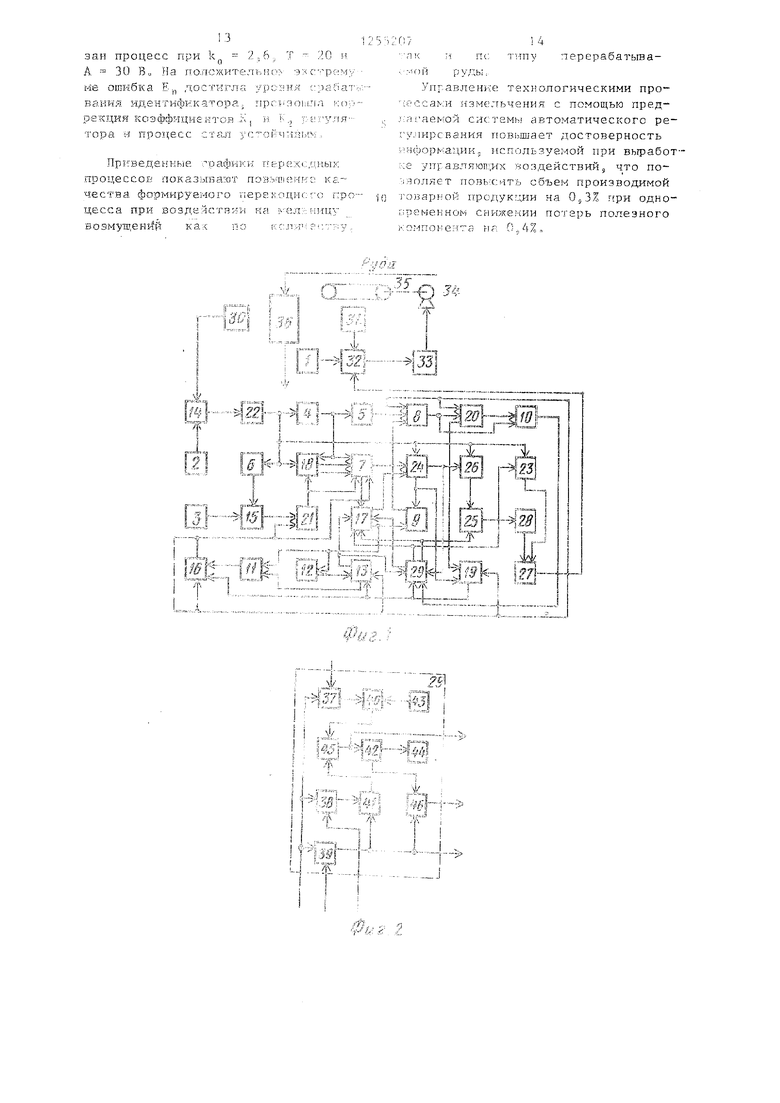
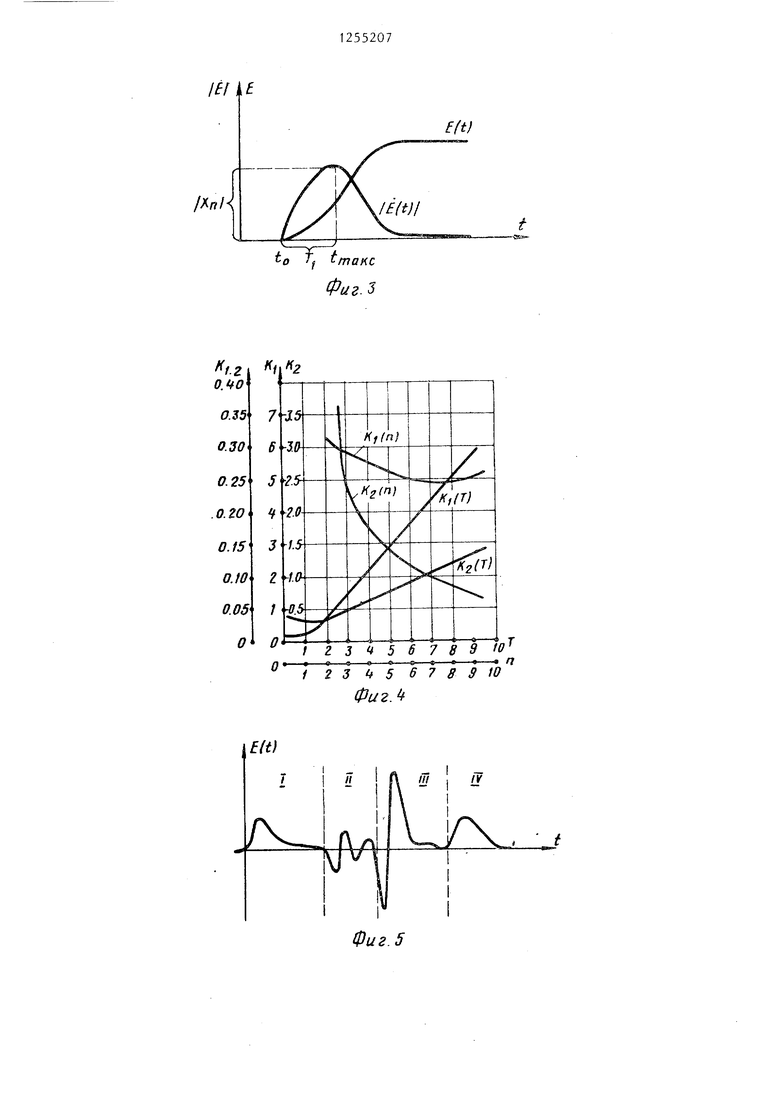
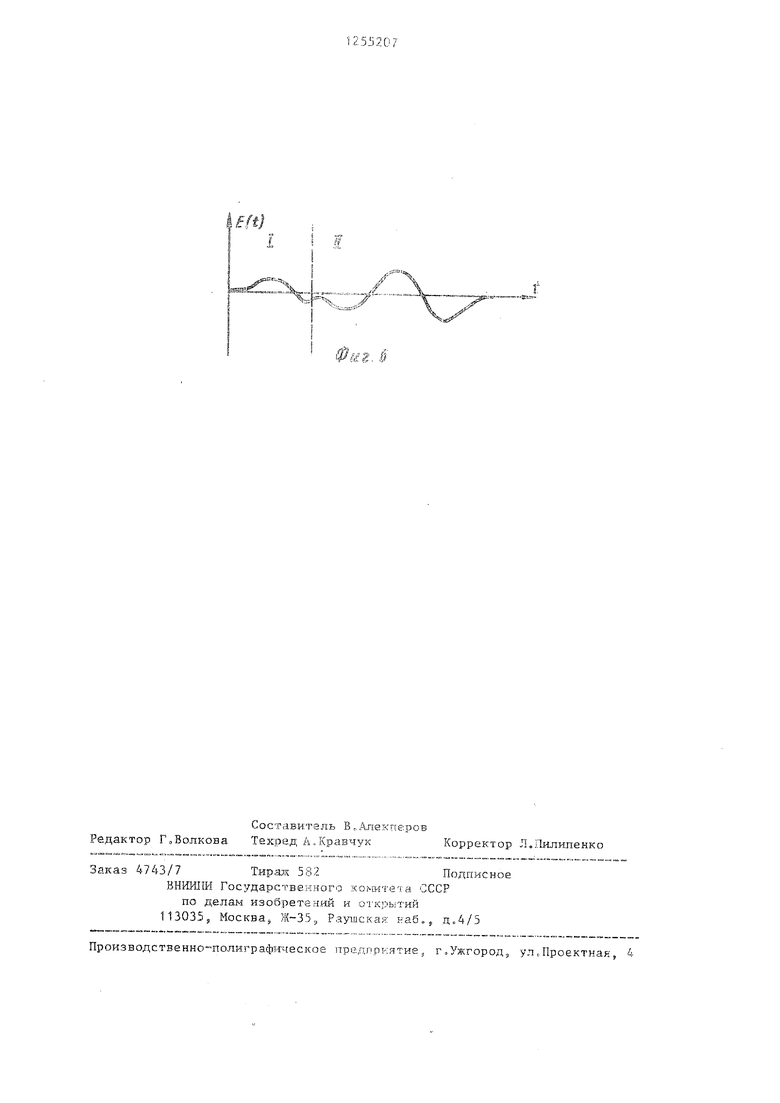
На фиго 1 представлена функциональная блок-схема системы; }-:афиг.2блок-схема вычислителя; на фиг. 3 графики изменения ошибки рассогласования и ее производной вО времени при лодаче скачкообразного воздействия; на фиг. 4 - графики изменения статического К, и динамического К коэффициентов системы при изменении постоянной времени объекта регулирования; на фиг. 5 - график переходнь х процессов в системе при изменении (увеличении) статического коэффициента усиления К, в передаточной функции объекта; на фиг. 6 - графики переходных процессов в системе при одновременном изменении (увеличении) статического К и динамического К коэффициентов в передаточной функции объекта.
Система автоматиче.ского регулирования загрузки мельницы (фиг. 1) включает датчик 1 массы, задатчик 2 уровня загрузки, первый 3 задатчик опорного сигнала, блок 4 дифференцирования, первый 5, второй 6 блоки определения модуля, логический блок 7, амплитудный детектор 8, блок 9 формирования выдержки времени, первый 10, второй 11 и третий 12 масштабные блоки, первый 13, второй 14, третий 15, четвертый 16 блоки срав- нения, первый 17 и второй.18 блоки памяти, таймер 19, триггер 20, первый ключевой элемент 21, фильтр 22, первый 23, второй 24 и третий 25 блоки умножения, первый 26 и второй 27 блоки сложения, интегратор 28, вычислитель 29, датчик 30 уровня загрузки, задатчик 31 массы, регулятор 32 массы, блок 33 управления двигателя 34 питателя 35 подачи руды в мельницу 36.
Вычислитель 29, осуществляющий пересчет статического К, и динамического Kj коэффициентов системы регулирования (фиг. 2),содержит второй 37, третий 38 и четвертый 39 ключевые элементы, четвертый 40, пятый 41 и шестой 42 блоки умножения, второй 43 третий 44 задатчики опорного сигнала
первый 45 и второй 46 блоки деления. Система работает следующим образом.
При подготовке системы к работе задатчик 31 массы устанавливается в
положение, соответствуюи1ее производи-55 чение z от задатчика 2
тельности мельницы при среднем, для данного месторождения типа руды, а задатчик 2 уровня загрузки - в поло W(p)
жение, соответствующее оптимальному заполнению мельницы.
В случае, когда заполнение мельницы равно заданному, первьп ключево элемент 21 закрыт, на регулятор 32 массы поступают сигналы от датчика 1 массы и задатчика 31 массы, и в случае значимых рассогласований сигналов текущего и заданного расхода руды регулятор 32 через блок 33 управления изменяет скорость вращения двигателя 34 питателя 35, стабилизируя заданный расход руды.
Изменение физико-механических и текстурноструктурных свойств перерабатываемого материала, а также износ футеровочной брони и шаровой загрузки ведут к изменению статического и динамического коэффициентов в передаточной функции объекта, которую в общем виде можно представить в операторной форме в пиде -F
k.p/
(Т.р + 1)
(1)
W(p)
Т п
где k - статический коэффициент усиления ;
динамический коэффициент усиления;
время запаздывания объекта; порядок объекта.
ИзменеЕ{ие уровня загрузки мельницы вызывает изменение кинетической энергии рудно-шаровой внутримельнич- ной загрузки, что ведет к ухудшению качественных показателей работы цикла измельчения и всего процесса-обогащения Б целом. Для организации оптимального управления необходимо осуществлять идентификацию переменных параметров k и Т и производить пересчет статического К( и динамического К2 коэффициентов усиления в формируемом регулятором 32 совместно с вычис- 29
лителем
законе управления вида
U(t)
г
К,- E-Xt)
45
50
Е(г)гг:
(2)
где E(t) - отфильтрованны сигнал
рассог ласопания.
Контролируемая датчиком 30 величина заполнения х и его заданное
1К1Ст пают ia
блок 14 сравнения, сигна/ i-a выходе которого Е1, зашумм1М11 ыГ| помехой, поступает на вход фи.чьтра 1-2.
912
Отфильтрованный сигнал К,, поступает на второй блок 6 определения модуля и через блок 4 дифференцкрования на первый блок 5 определения модул г,
Фильтрация сигнала ошибки Е. осуществляется в фильтре 22,
Коэффициенты К, и К. - настроечные параметры регулятора, определяются в процессе активной идентификации в вычислителе 29,
Активная идентификация заключается в подаче через регулятор 32 на вход объекта 36 нормированног о скачкообразного воздействия U, определяемого во втором блоке 24 умножения по сигналам от первого блока 17 памяти и фильтра 22„
Скачкообразное воздействие U, подается Б момент tf,, определяемый в логическом блоке 7 из условия достижения нуля первой производной величины рассогласования , путем оценки положения системы на фазовой плоскости (ESE). Процесс идентификации начинается при переходе фазовой траектории через ось Е, при выполнении следующих логических условий, осуществляемых в логическом блоке 7
Е.
EZ
знак Е
знак Е,
(4)
знак Е
знак Е „ ,
где /EZ/ - допустимое значе1ше модз ля величины рассогласования Е,
При выполнении условий (3.V-(5) сигналы с логического блока 7 поступают на управляющие входд; первого блока 17 памяти и блока 24 умножения логический блок блокируется до прихода следующего сигнала от блоков 2:1 и 19. Величина K|j.,j поступает с первого выхода блока 17 памяти на BTopc вход блока 24, а сформированное в Злоке 24 скачкообразное тестирующее зоздействие поступает на первый блок 26 сложения, на блок 9 форш рования выдержки времени и на таймер 19, отмечая начальный момент t величншм времени Т( поиска максимума 1х 1 А модуля скорости изменения отклонения Е„.
Сигнал с выхода блока 24 поступа- (;т на управляющий вход блока 9 форFfOH времени, равной 0,2 ,(„., j носту- (la.e.т сиг на.п иг упранляюгций вход амплитудного детектора 8, на второй которого постуг ает текущее значение модуля производной С лгнала рассогласования /Ер./ от гтервого блока 5 опрсде: :ен - я Mo;i,yj;H,
В блоках 26. 25J 23, 28 к 27 -о сигналам от блокоз 29, 7 и 22 фор- Ь Ируется ynpa5j::,4ioiii;ee зоздейстзие вида
20
и К
-((
0
5
0
которое с выход.а / / поступает а оо7эекг регулирования через регулятор 32, которъш через блок 33 управления иэменяйт подачу руды в мель- ниду 36„
В амплитудном детекторе оценива- огся .величина 1акснмального значения модуля производной А. которая погтупае на триггер 20 и на первый масштабный блор; 10,, Сигнал с триггера 20 нос гунает на таймер 19, фиксируя момент окон-ания ноиска макf qxc
, К на второй
(управляющргй) р.ход масштаоьгого блока iO. На ВЫХОДЕ блока 10 формируется 1еличкна А максимального значения модуля производ1:ой с учетом перехода объекта иа правз, -ю зетчь экстремальной характернстик путем умножения величины при которой сработал акплитудньй детектор 3, на постоян- Н1,;;й множитель (1 + ,У/. где - величина порога различимостм при поиске ма;;си.цума к; амплитудном детекторе 8 (фиг, 3),
выходе таймера 19 формируется нояое значение параметра Т,, которое поступает на вычислитель 29, первый бг:о- 13 сравнения и третий блок 16 cpajjнения ,
На первый блок 13 сравнения посту- лаем- неличина 0,3 T|(,i, i от третьего мас итабного блока 12, Если Т|г,,)
0,3 Т
1 ( И-((
; о управление остается Н11ежним и коэффициенты К ( и К,; рег улятора не нересчитываьэтся. EC;IH
T(lni - T,, , TO сигнал с выхода блока 13 поступает на управляющие входы блока 17 памяти и вычислителя 29. В вычислителе 29 происходит определение новых значений ко- эффициентов Kj и К по сигналам от блоков 24, 19 и 10 по выражениям
К.(п) K,(,,.(EJ .с. т;, ; (7)
К
1(Г|) (n j Р - ((п)
где об и р - постоянные коэффициенть определяемые при первоначальной настройке сие темы автоматического регулирования загрузки мельницы;
К|, К,(р) - новые значения коэффициентов пропорциональ- ной и интегральной составляющей ПИ закона регулирования;
К,, ,./Ef,) - величина скачкообраз- цп--) I
него возмущающего воз-
действия.
Новые значения Т, , К, и К записываются в блок 17 памяти и поступают на блоки 25, 26, 23, 28 и 27 для формирования управляющего воздейст- ВИЯ по выражению (2).
Одновременно с этим сигнал с выхода второго блока 14 сравнения поступает на управляющий вход второго масштабного блока 11, на второй вход которого подается от блока 17 памяти старое значение Т,(.,).
В четвертом блоке 16 сравнения сравниваются величины Т,(|) от блок 19 и ЗT( от блока 11. Если Т((п - ЗТ,(,, , то сигнал с блока 16 поступает на ключ 21, разреша проведение новой идентификации, а также на блоки 16, 13, 19, 20, 8 и 7, приводя их в исходное положение. Введение блоков 11, 12, 14, 15 и 21 повышает помехозащищенность при определении коэффициентов К, и К и устраняет выработку ложных управлений регулятором, повьшая качество формируемого переходного процесса.
Данная структура построения системы автоматического регулирования позволяет учитывать при формировании управляющего воздействия изменяющий- ся порядок объекта п и его постоянную времени Т. На фиг. 4 показаны графики изменения коэффициентов Kj
j
10
ь - 15
20
5
30
40
ния Тип, из которых видно, что при измененной постоянной времени Т в передаточной функции объекта (1) коэффициенты К и К,, увеличиваются при увеличении Т и уменьшаются при снижении порядка объекта п.
Оперативная, в темпе с процессе, активная идентификация коэффициентов К и К позволяет приблизить переходной процесс в :- ельнице и в замкнутой системе к апериодическому оптнмаль- ноьгу- процессу (фиг. 5), причем выбор достаточно больших значений сС и ft в выраженр ях (7) и (8) позволяет производить идентификацию при большом уровне внешних возмущений и помех.
На фиг. 5 показаны графики отработки возмущающего воздействия в виде ступенчатой функции системой ав- томатического регулирования загрузки мельницы. В первой зоне (фиг. 5) изображен близкий к оптимальному апериодическом: при ПИ законе управления процесс при kp 1, Т 4 мин и амплитуде скачка по возьгущению А 24 В, при которой процесс идентификации не производится. Во второй зоне (фиг, 6) коэффициент k увеличился в 4 раза и процесс стал неустойчивым, так как параметры регулятора не изменились. В третьей зоне показан про- - цесс при kg 4, Т 4, А 55 В. При максимальном по модулю амплитудном значении процесса происходит включение процесса активной идентификации (фиг. 3). Через время Т, параметры регулятора корректируются в сторону уменьшения в 4 раза. В четвертой зоне (фиг. 5) показан переходной процесс при kg 4, Т 4, А 24 В, который в силу предварительной настройки коэффициентов К и К близок к оптимальному процессу первой зоны (фиг, 5). i
На фиг. 6 показаны графики переходных процессов при одновременном
изменении k.
и Т объекта.
первой
зоне показан неустойчивый процесс при k 2,6, Т 20, А 20 В, когда идентификация не включалась в силу малости возмущения, а параметры регулятора соответствуют объекту с k - 1,3 и Т 4, т.е. в объекте изменились в сторону неустойчивости как статический, так и динамический параметры. Во второй зоне (фиг. 7) покаэан процесс при 1Приведеь кые графи1 :и г ерехс.цкых процессов показыБаат пз въ-кенкс кг.- чества формируемого г;ере коднс ч; пр цесса при воздейстн; на Ь елл5-1 1цу возмущений кал по iv(:jr)M : г ;:у
V1K и ПС типу перерабатьгаа- Mf)H руды,
Уг1гаЕлен}«; технологическими про- ;ессак 1 нзме:тьчения с помощью предлагаемой системы автоматического ре- л лирсвания повьшает достоверность пформацик, используемой при вьфабот ;е у 7{:а:елкюп:;их воздействий, что по- ;яолкет no3b :c;i--iTb объем производимой 0)зарной продук дии на О,. 3% гфи одно- ipGMeHKOM снижении no j spb полезного :омпоне:ч з на П,.4%„
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления циклом измельчения | 1983 |
|
SU1357072A1 |
| Адаптивный регулятор | 1982 |
|
SU1076873A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Система адаптивного управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1480878A1 |
| Адаптивный регулятор | 1980 |
|
SU911462A1 |
| Система управления измельчительным агрегатом | 1982 |
|
SU1101302A1 |
| Система регулирования загрузки измельчительного агрегата | 1983 |
|
SU1146085A1 |
| Система автоматического регулирования загрузки мельницы | 1981 |
|
SU1007729A1 |
| Адаптивный регулятор | 1987 |
|
SU1432459A1 |
| Система автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491579A1 |
; М
I. J ,,Lа---- -
i 1- - -Ы
I/
-г , т
j j /;г-г-
IH и
o f fmoKc
Фиг.З
/-2 O.tfO
0.35 0.30
0.25
.0.20
0.15
O.W
0.05
0
123tf5678SW
ФигЛ
III
IV
/Ч,
Фиг. 5
:v I ./
с о с т а в и т е л ь В „ Ал е к п е р о в Редактор ГоВолкова Техред А„Кравчук Корректор Л.Пилипенко
Заказ 4743/7 Тиргш 582Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская н-аб., д.4/5
Производственно-полиграфическое предприятие., г.Ужгород, ул„Проектная 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
