(54) АМОРТИЗИРУЮЩАЯ ПЛАТФОРМА
I
Изобретение относится к приборос1роешю н может быть использовано в движущихся и стационарных объектах для установки приборов, требующих амортизации при сохранении параллельности трех взаимно перпендикулярных осей координат приборов и объекта.
Известно амортизирующее устройство с траллельным перемещением рабочей плиты, имеющее направляющие детали. В этом устроййве параллельное возвратно-поступательное движение рабочей плиты со штоком обеспечива- ется за счет применения направляющих втулок иди упругих диафрагм 1.
Недостаток известной конструкции - большие габариты, ограничивающие область приме нения устройства.
Наиболее близкой к изобретению является амортизирующая платформа, стабилизированная относительно трех осей координат основания, содержащая основание, расположенные па раллельно основанию промежуточную и рабо чую плиты, установленные между ними у1фугие элементьк и элементы подвижного соединения плит (2.
Недостатками зтой платформы являются громоздкость, большая масса и высота, что практически исключает возможность ее использо- вания в подвижных объектах.
Целью изобретения является уменьшение габаритоъ и массы амортизирующей платформы.
Указанная цель достигается тем, что платформа снабжена направляющим и опорно-направляющим механизмами, направляющий механизм выполйен в виде двойного шарнирного паралле10лограмма, плоскость которого параллельна плоскости о(жования, установлен между основанием и промежуточной плитой и шарнирно связан с последними, опорно-направляющий меха- низм вьшолнен в виде двух качающихся в
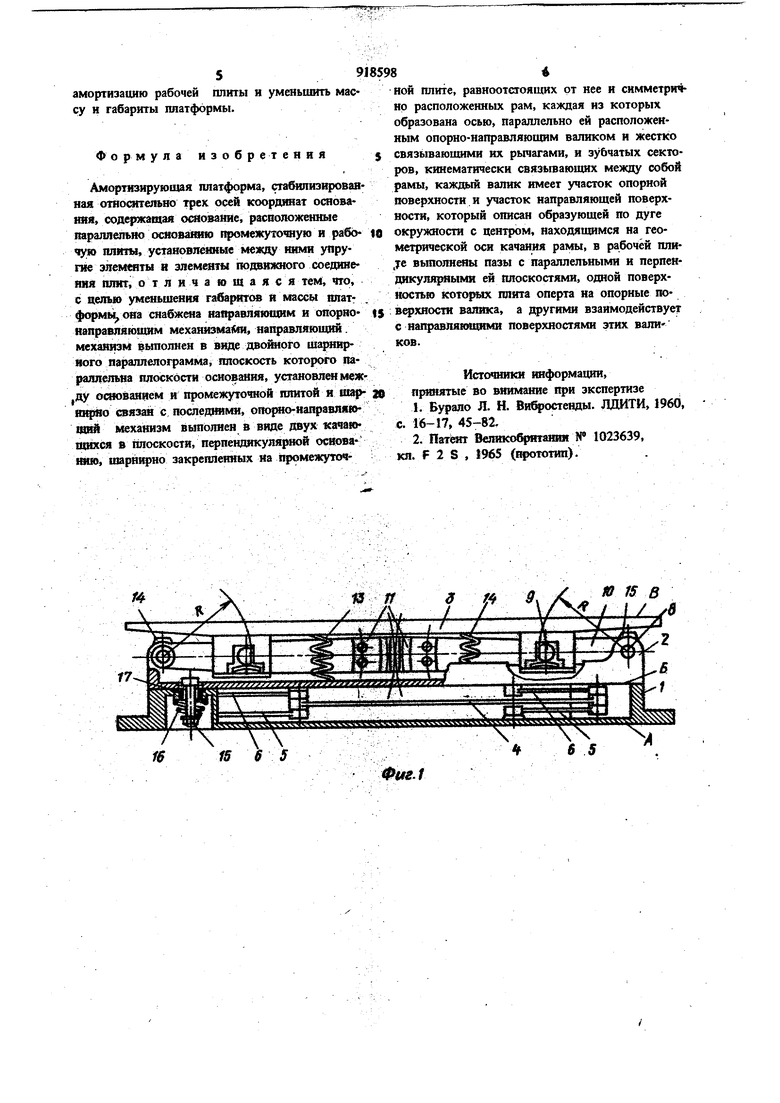
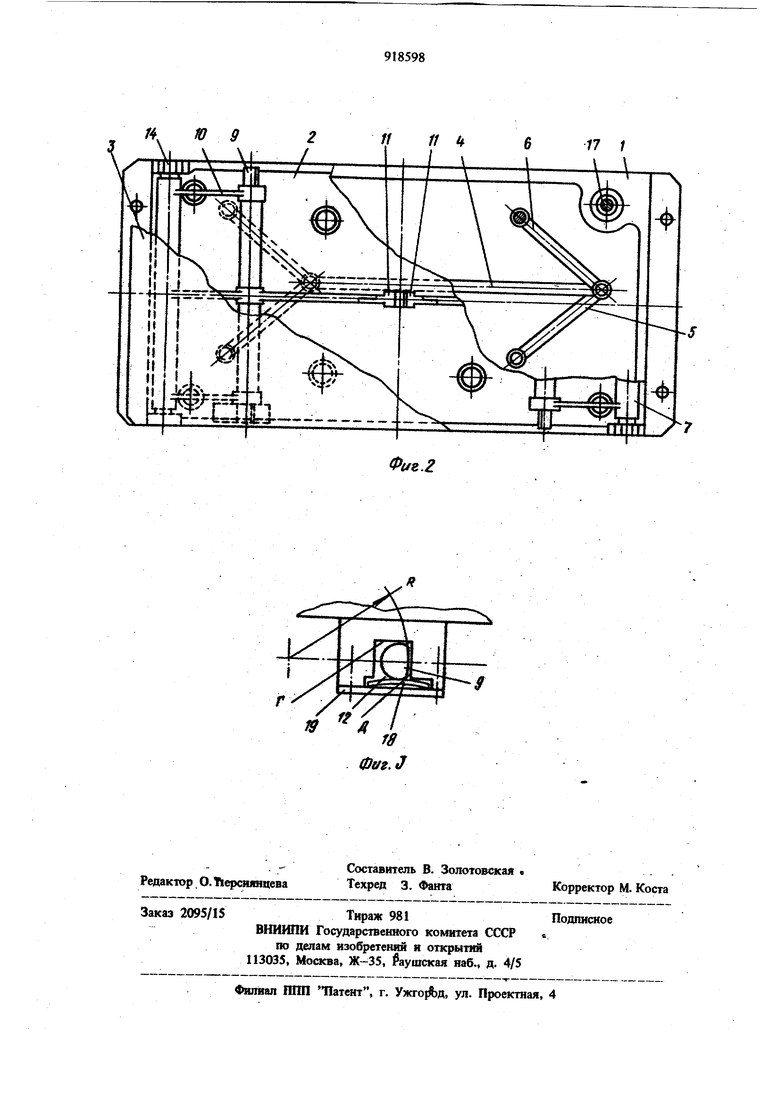
IS плоскости, перпендикулярной основанию, шарнирно закрепленных на промежуточной пните, равноотстоящих от нее и симметрично расположенных рам, каждая из которых образована осью, : параллельно расположенным опорно30направляющнм валиком и жестко связывающими их рычагами, и зубчатых секторов, К1шематически связьтаюишх между собой рамы, каждый валик имеет участок опорной поверх9ности и участок направляющей поверхности, который описан образующей по дуге окружности ,0 центром, находящимся на геометрической оси качания рамы, в рабочей плите выполнены пазы с параллельными и перпендику лярными ей плоскостями, одной поверхностью которых плита оперта на опорные поверхности валика, а другими взаимодействует с направляющими поверхностями этих валиков. На фиг. 1 изображена платформа с разрезом основания и промежуточной плиты, вид спереди; на фиг. 2 - платформа с вырывами части рабочей и промежуточной плит, вид сверху; иа фиг. 3 - рабочие части опорно-направляющих валиков качаюилихся рам и пазов рабочей плиты. Амортизирующая платформа содержит основа ние 1, промежуточную плиту 2, рабочую плиту 3, расположенные между ними направляющий и опорно-направляющий механизмы. Основание 1 имеет опорную плоскость А и параллельную ей плоскость скольжения Б. Промежуточная плита 2 подвижно установлена на плоскости скольжения Б основания 1. Направляющий механизм платформы выполнен в виде двойного шарнирного параллелограмма, плоосость которого параллельна плоскости основания, с одной продольной тягой 4 и четырьмя попе| мными тягами S. и 6, которыми он шарнирно соединен с основанием 1 и промежуточной Ш1и1той 2. Направляющий механизм размещен между основанием и промежуточной плитой 2. Опорнонаправляющий механизм платформы выполнен в виде двух качающихся в плоскости, перпендикулярной основанию, шарнирно закрепленных на промежуточной плите; равноототоя1Ш1Х от нее и симметрично расположенных рам 7, каждая из которых имеет оси ка чаиия 8, параллельные им и равноудаленные от них опорно-направляющие валики 9, соединяющие их рычаги 10. Между собой рамы связаны зубчатыми секторами 11. Посредством осей качания 8 рамы 7 в средаем положении шарнирно установлены в отверстиях (не обозначены) приливов промежуточной плиты 2 параллельно плоскости скольжения Б. Опорнонаправляющие валики 9 имеют участок опорной поверхности и участок направляющей поверхности, который описан по дуге окружности радиусом Я с центром, находящимся на геомет рической оси качания рамы 7. Опорно-направляющий механизм размещен между промежуточной плитой 2 и рабочей плитой 3. Рабочая плита 3 имеет установочную плоскость В, пред назначенную для установки приборов, и пазы 12. Одной поверхностью пазов 12 рабочая плита 3 оперта на опорные поверхности валиков 9 с возможностью перемещения перпендикулярно плоскости плиты, другими - взаимодействует 4 с участками поверхности опорного валика 9, описанными образующими по дуге окружности с радиусом R. Платформа включает в себя также амортизирующие пружины 13, буферы 14, ограничительно-возвратное устройство с колонками 15, возвратно-прижимными яружи нами 16 и амортизируюцшми втулками 17, а также демпферы горизонтального и вертикального действия (не показаны). Рабочая плита 3 поджимается к опорно-направляющим валикам 9 плоскими пружинами 18 и планками 19. Амортизирующая платформа работает следующим образом. Рабочая плитка 3, амортизированная пружинами 13 и о шрающаяся на опорно-направляюише валики 9 качающихся рам 7, при вибрациях и ударах, воспринимаемых основанием я промежуточной плитой 2, вследствие своей инерциС)(гности перемещается совместно с качающимися рамами 7 относительно промежуточной плиты 2 перпещшкулярио ее шюскости. Благодаря установке направляющих плоскостей рабочей -плиты 3 между направляющими цилиндрическими поверхностями опорно-направляющих валиков 9, выполненных с участ :ами поверхности с радиусом R отИосительяо геометрических осей качания 8 рам 7, исключается возможность разворота рабочей нлиты 3 отйосительно промежуточной юшты 2. Перемещеиюе рабочей плИтгл 3 относительно валиков 9 ограничивается их упорными тордами. Промежуточная плита 2 с рабочей плитой 3 и опорНо Направляющйм механизмом подвижно установлены на плоскостя скольжения Б основания I и связана с ней двойным ш нйрным Параппелограммом пара тяг 5 которого связана с основанием 1, а пара тяг 6 - с {промежуточной плитой 2, Поэтому при В{1бра1щях и , воспрйснимаемых основанием I, 1 ме точная плита 2 с установленным На ней спорно-направляющим механнзмом н рабочЫ плитой 3 также вследствие инерциогаюсти будет перемешаться в плоскости скольжения Б относительно основания 1, сохраняя параллельность трех осей координат, рабочей плиты 3 и основания 1. Boaepat промежуточной плиты 2 в сретее положение, ограничение ее хода и пряжюл к основанию 1 осуществляется с помонв ю колонок 15, пружин 16 и амортизирующих втулок 17. з спокоение колебаний плит 2 И 3 относительно основания I производится демпферами горнзонтального и вертикального действия. Введение в конструкшио амортизирующей платформы направляющего и опорно-направляющего механизмов обеспечивает сохранение параллельности трех взаимно перпешшкулярных осей координат плиты н основания при их взаимных перемещениях во время вибраций н ударов, позволяет осуществить надежную
амортизацию рабочей плиты и уменьшить маесу и габариты платформы.
Формула изобретения
Амортизирующая платформа, сгабилиэ1фоваяная отнооггельно трех осей координат основа няя, содержащая ооюванйе, рзсположениые параллельно основа1шю промежуточную и рабо чую плиты, установленные между инми упругие элемшты и элементы подвижного соедине ния плнт о т л и ч а ю щ а я с я тем, что, с цепью уменьшения н массы платформы, она снабжена направляющим и опорнонаправляющим механизмаКин, направляющий. механизм выполнен в виде двойного шарнирйого параллелограмма i плоскость которого параллельна плоскости основания, установлен между ойюванием и промежуточной плитой и шарннряо связан с, последмлв, оПорио-направляюОШй механизм выполнен в виде двух качающихся в imocKocTH, П(пенднкул«фной основаюио, шарн1фно закрепленных На промежуточной плите, равноотстоящих от нее и симметрично расположенных рам, каждая из которых образована осью, параллельно ей расположенным опорно-направляющим валиком н жестко связывающими их рычагами, н зубчатых секторов, кинематически связьгеающнх между собой рамы, каждый валик имеет участок опорной поверхности и участок направляющей поверхности, который описан образующей по дуге окружности с центром, находящимся на геометрической оси качания рамы, в рабочей плиje выполнены пазы с параллельными и перпендикулярными ей плоскостями, одной поверхностью которых плита оперта на опорные пов)хности валика, а другими взаимодействует с направляншщмй поверхностямн этих валИ ков.
Источники информации, принятые во вннмгшие арн экспертизе
Л Г5 в
N
0tte.1
Фиг.г
