(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИНТЕГРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический интегратор | 1976 |
|
SU604007A1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Двухканальная следящая система | 1984 |
|
SU1241188A1 |
| Электрогидравлический регулятор гидротурбины | 1967 |
|
SU363381A1 |
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 2002 |
|
RU2233415C2 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Устройство для определенияглубиНы зАлЕгАНия ТРубОпРОВОдОВ | 1976 |
|
SU853281A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1540003A2 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
Изобретение относится к автоматй-v ке и вычислительной технике и мох{ет быть применено в приборах, содержащих электромеханические интеграторы. Известен электромеханический интегратор, содержащий сумматор, усилитель, двигатель l . Наиболее близким к изобретению по технической сущности является эЛектромеханический интегратор, содержащий .сумматор, первый вход которого соединен с первым входом интегратор вюрой вход - с выходом тахогенератора, а выход - через усиг1итель с входом двигателя, вал которого кинема-, тически соединен с валами тахогенератора и преобразователя угла поворота вала в напряжение 2. Однако значительные трудности в по добных интеграторах вызывает введение начальных условий. Для этого приходит ся выключать в нем интегрирующий привод и вручную, по шкальному устройству устанавливать необходимые исходые данные.. Кроме того, при достижеии выходным преобразователем преельных угловых положений-функционирование интегратора автоматически прекращается до обеспечения ввода пребразователя (в большинстве случаев вручную) в рабочую зону. Цель изобретения - расширение функциональных возможностей интегратора за счет обеспечения в нем автоматической установки начальных условий. Цель достигается тем, что в afieKтромеханическИй интегратор введены переключатель и реле, обмотка которого соединена с выходом сумматора, вход тахогенератора подключен через параллельно соединенные размыкающие контакты реле и переключателя с вторым входом интегратора, а выход преобразователя угла поворота вала в напряжение соединен через замыкающие контакты переключателя с третьим входом сумматора.
3 9
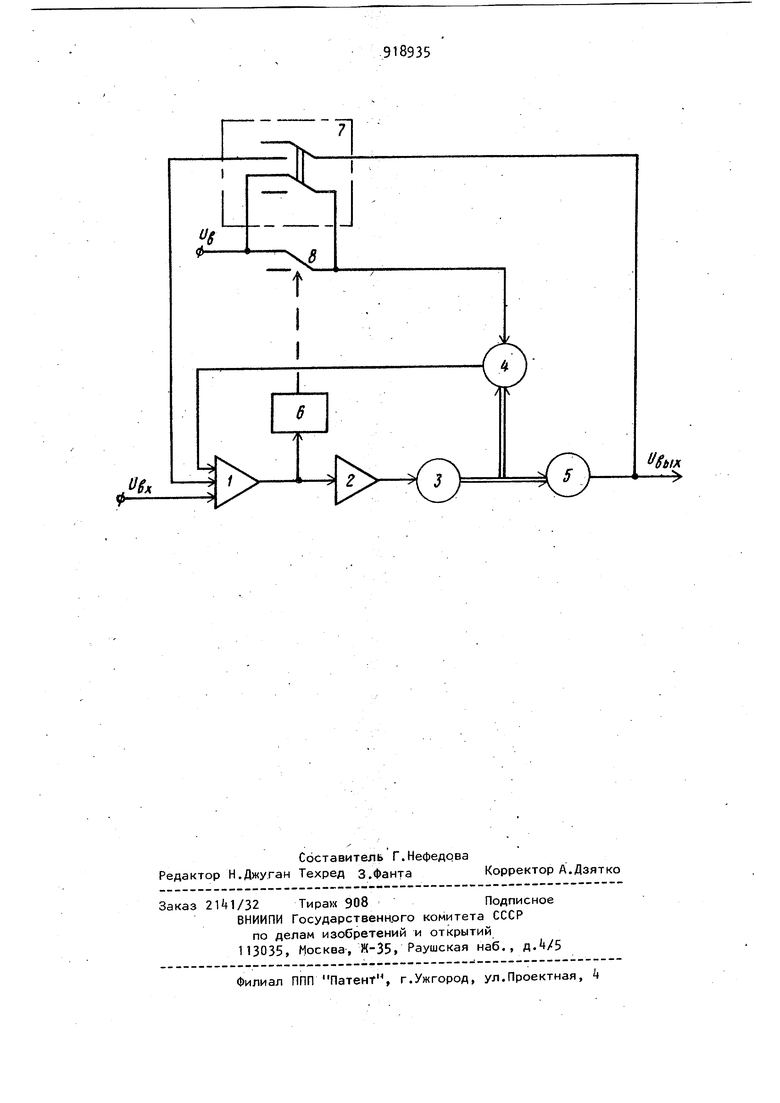
На чертеже приведена функциональиал схема электромеханимеского интегратора .
Интегратор содержит сумматор 1, усилитель 2, двигатель 3) тагохенератор А, преобразователь 5 угла поворота вала в напряжение, реле 6, переключатель 7, размыкающие контакты реле 8, напря : ения на входе и выходе интегратора Ugx и иВых напряжение возбуждения тахогенератора Ug
Интегратор работает следующим образом.
.Предположим, что преобразователь угла поворота вала в напря : ение 5 находится на. границе допустимого диапазона, а требуется ввести нулевые начальные условия, т.е. установить преобразователь 5 угла поворота вала в напряжение на ноль. Для этого при нулевом входном напряжении переключатель 7 необходимо установить в положение, противоположное исходному. Под действием сигнала, поступившего с выхода преобразователя 5 угла поворота вала в напряжение, двигатель 3 начнет вращаться в направлении уменьшения выходных напряжений преобразователя 5 угла поворота вала в напряжение. Для ускорения этого процесса в интеграторе служит реле 6. При поступлении сигнала на сумматор 1 реле 6 срабатывает и выключает напряжение возбуждения тахогенератора Uf, 5 поступающее на второй вход интегратора. 8 результате, обратная связь по тахогенератору отключается и двигатель 3 отрабатывает возникшее рассогласование с максимальной скоростью, В момент прохождения преобразователе 5 угла поворота вала в напряжение угловых поло хений (вблизи нуля)5 соответствующих зоне нечувствительности реле 6, оно возвращается в исходное положение и подключает тахогенератЬр Происходит демпфирование интегратоэа и точная, плавная отработка напряжения на выходе преобразователя 5 угла поворота вала в напря 1 ение на ноль. При необходимости введения ненулевых начальных условий на первый вход подается напряжение Ug соответствующее необходимому углу пово54.
рота вала преобразователя 5 угла поворота вала в напряжение, и процесс отработки этого напряжения происходит аналогично описанному при сбросе
на ноль. При этом ускорение процесса происходит при сигналах на выходе сумматора 1, превышающих зону нечувствительности реле 6, Для обеспечения надежной работы интегратора в периодах между выставкой начальных условий ,в переключателе 7 имеются размыкающие контакты блокирующие размыкающие контакты 8 реле 6, срабатывание реле 6 может происходить, например, в
переходных процессах интегратора.
Таким образом изобретение обеспечивает автоматический ввод начальных условий и сброс любых накопленных значений до требуемых
Формула изобретения
Электромеханический интегратор,
содержащий.сумматор, первый вход ко-, торого соединен с первым входом, интегратора, второй вход - с выходом тахогенератора, а выход - через усилитель с входом двигателя,, ва.л
0 которого кинематически соединен с ,валами тахогенератора и преобразователя угла поворота вала в напряжение, отличающийся тем, что, с целью расширения функциональ. ных возмо); ностей интегратора, он содержит переключатель и реле, обмотка которого соединена с выходом сумматора, вход тахогенератора подключен через параллельно соединенные размыQ кающие контакты реле и переключателя с вторым входом интегратора, а выход преобразователя угла поворота вала в напряжение соединен через замыкающие контакты переключателя с третьим
, входом сумматбра.
Источники информации, принятые во внимание при экспертизе
N 312239, кл. -С 05 .В ll/tO, 17.07.69.
t
N /
