Предлагаемое изобретение относится к области артиллерийских установок с автоматическим наведением пушки и может быть использовано в электрогидравлических следящих приводах для точного наведения объектов с ограниченным углом поворота.
Известны артиллерийские установки [1], [2], работающие в ограниченных углах наведения пушки.
Существенным недостатком в них являются невозможность точной стрельбы в зонах углов торможения при движении пушки в сторону упора.
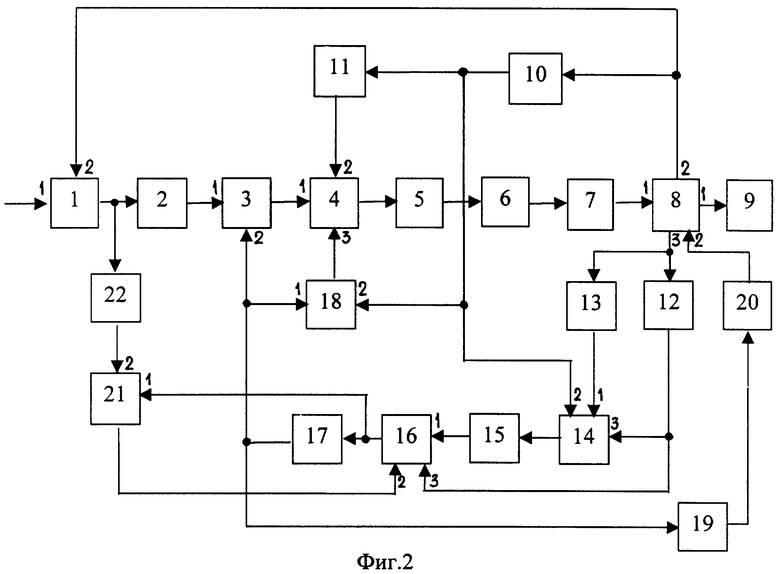
Наиболее близкой к предлагаемому изобретению по технической сущности является установка [3], [4], принятая за прототип и приведенная на фиг.1, которая содержит последовательно соединенные измерительное устройство 1 с первым входом для управляющего воздействия, предварительный усилитель 2, схему ограничения углов 3, выходной усилитель 4, управляющий электромагнит 5, насос с механизмом управления 6, гидромотор 7, редуктор 8, пушку (объект управления) 9, второй выход редуктора 8 подключен ко второму входу измерительного устройства 1 и через последовательно соединенные принимающий тахогенератор 10, корректирующий контур 11 ко второму входу предварительного усилителя 2, а выход пушки 9 через ограничитель углов 12 подключен ко второму входу схемы ограничения углов 3.
Недостатком известной артиллерийской установки является ограничение зоны стрельбы по углу наведения пушки при движении ее в сторону упора вследствие срабатывания схемы ограничения углов, жестко отключающей управляющее воздействие по сигналу от ограничителя углов в момент вхождения пушки в зону угла торможения, при этом точность наведения не обеспечивается, стрельба не ведется. Кроме того, после срабатывания схемы ограничения возможно появление остаточной скорости движения пушки из-за дрейфа нуля выходного усилителя или вследствие действия момента неуравновешенности пушки в разомкнутом по углу контуре управления пушкой.
Изобретение направлено на увеличение зоны поражения артиллерийской установки за счет возможности точной стрельбы в зоне углов торможения и на исключение остаточной скорости движения пушки после ее торможения около упоров.
Это достигается тем, что в артиллерийскую установку, содержащую последовательно соединенные измерительное устройство с первым входом для управляющего воздействия, предварительный усилитель, схему ограничения углов, выходной усилитель, управляющий электромагнит, насос с механизмом управления, гидромотор, редуктор, объект управления, причем второй выход редуктора подключен к второму входу измерительного устройства и к последовательно соединенным принимающему тахогенератору и корректирующему звену, а также ограничитель углов, введены измеритель углов, коммутатор, сумматор, реле с временной задержкой, согласующее устройство, интегратор, блок селекции, тормоз, ключ, реле с зоной нечувствительности, причем выход корректирующего контура подключен к второму входу выходного усилителя, третий выход редуктора соединен с входом ограничителя углов и с входом измерителя углов, а выход измерителя углов через последовательно соединенные коммутатор, сумматор, реле с временной задержкой, согласующее устройство и интегратор соединен с третьим входом выходного усилителя, а выход согласующего устройства также соединен с вторым входом схемы ограничения углов, с входом блока селекции, выход которого соединен с входом тормоза, выход которого соединен со вторым входом редуктора, выход реле с временной задержкой также соединен с первым входом ключа, выход измерительного устройства через реле с зоной нечувствительности также соединен со вторым входом ключа, выход которого соединен с вторым входом реле с временной задержкой, выход принимающего тахогенератора также соединен со вторыми входами интегратора и коммутатора, третий вход которого соединен с выходом ограничителя углов и с третьим входом реле с временной задержкой.
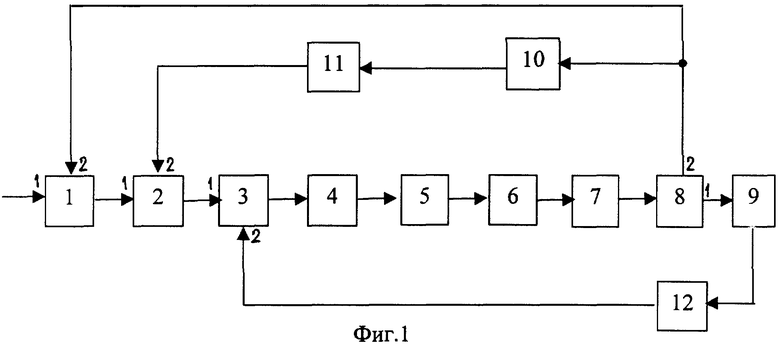
Изобретение поясняется чертежами, где на фиг.1 приведена функциональная схема прототипа, а на фиг.2 - функциональная схема предлагаемой артиллерийской установки.
Сведения, подтверждающие возможность осуществления изобретения с указанным выше техническим результатом, заключаются в следующем.
Артиллерийская установка содержит последовательно соединенные измерительное устройство 1 с первым входом для управляющего воздействия, предварительный усилитель 2, схему ограничения углов 3, выходной усилитель 4, управляющий электромагнит 5, насос с механизмом управления 6, гидромотор 7, редуктор 8, пушку (объект управления) 9, причем второй выход редуктора 8 подключен ко второму входу измерительного устройства 1 и через последовательно соединенные принимающий тахогенератор 10, корректирующий контур 11 ко второму входу выходного усилителя 4, причем третий выход редуктора 8 соединен с входом ограничителя углов 12 и с входом измерителя углов 13, выход измерителя углов 13 через последовательно соединенные коммутатор 14, сумматор 15, реле с временной задержкой 16, согласующее устройство 17 и интегратор 18 соединен с третьим входом выходного усилителя 4, выход согласующего устройства 17 также соединен со вторым входом схемы ограничителя углов 3, с входом блока селекции 19, выход которого соединен с входом тормоза 20, выход которого соединен с вторым входом редуктора 8, выход реле с временной задержкой 16 также соединен с первым входом ключа 21, выход измерительного устройства 1 через реле с зоной нечувствительности 22 также соединен с вторым входом ключа 21, выход которого соединен с вторым входом реле с временной задержкой 16, выход принимающего тахогенератора 10 также соединен со вторыми входами интегратора 18 и коммутатора 14, третий вход которого соединен с выходом ограничителя углов 12 и с третьим входом реле с временной задержкой 16.
Работа артиллерийской установки осуществляется следующим образом.
Управляющий сигнал поступает на первый вход измерительного устройства 1, на второй вход которого поступает сигнал с второго выхода редуктора 8, соответствующий угловому положению пушки 9. С выхода измерительного устройства 1 сигнал ошибки наведения, пропорциональный рассогласованию между сигналами первого и второго входов измерительного устройства 1, проходя через последовательно соединенные предварительный усилитель 2, схему ограничения углов 3, выходной усилитель 4, управляющий электромагнит 5, насос с механизмом управления 6 и гидромотор 7, редуктор 8 осуществляет угловое перемещение пушки 9 до момента, соответствующего нулевому значению ошибки наведения.
При движении пушки 9 на упор, в момент вхождения в зону угла торможения, ограничитель углов 12 дает релейный сигнал, поступающий на третий вход реле с временной задержкой 16 и на третий вход коммутатора 14, на первый вход которого поступает сигнал от измерителя углов 13, пропорциональный величине угла, пройденного пушкой 9 от момента вхождения в зону торможения, а на второй вход коммутатора 14 - сигнал от принимающего тахогенератора 10, пропорциональный скорости движения пушки 9. Коммутатор 14, при наличии сигнала на его третьем входе, пропускает на вход сумматора 15 сигналы с входов 1 и 2 коммутатора 14. Сумма этих сигналов с выхода сумматора 15 поступает на первый вход реле с временной задержкой. Момент срабатывания по входу 1 реле с временной задержкой 16 соответствует равенству единице функции торможения F1.

где αТ - угол, пройденный пушкой от момента вхождения в зону торможения;
ΩН - скорость движения пушки;
К1 - коэффициент, определяемый из условия К1·αТ=1, при ΩН=0 и соответствующий предельно допустимому углу движения пушки в зоне торможения;
К2 - коэффициент, определяемый из условия К2·ΩН=1 и соответствующий допустимому уровню скорости, при котором должно обеспечиваться торможение пушки 9 в момент вхождения в зону торможения;
для F1 ≥ 1 включается алгоритм торможения пушки, для F1<1 обеспечивается наведение пушки с заданной точностью.
Срабатывание реле с временной задержкой 16 при наличии сигнала на его третьем входе соответствует изменению на его выходе полярности напряжения для F1 ≥ 1, при этом:
схема ограничения углов 3, управляемая по второму входу через согласующее устройство 17 от реле с временной задержкой 16, блокирует поступление управляющего воздействия с выхода предварительного усилителя 2 на первый вход усилителя 4 и начинается процесс торможения пушки 9 гидромотором 7;
интегратор 18, управляемый по первому входу, начинает интегрировать с нулевых начальных условий сигнал скорости нагрузки, поступающий с выхода тахогенератора 10 на второй вход интегратора 18, с выхода которого сигнал поступает на третий вход выходного усилителя 4; таким образом, в контуре управления формируется дополнительная к сигналу с выхода корректирующего контура 11 обратная связь по угловому положению пушки, которая повышает эффективность торможения гидромотором 7 пушки 9;
блок селекции 19 включает тормоз 20, который параллельно с гидромотором через второй вход редуктора 8 обеспечивает торможение пушки и исключает возможность появления остаточных скоростей после завершения процесса торможения;
ключ 21, управляемый по входу 1, открывается, и выходное напряжение от реле с зоной нечувствительности 22, соответствующее знаку ошибки, поступает на второй вход реле с временной задержкой 16, обеспечивая безусловное выполнение функции торможения F2 ≥ 1, определяемую выражением

где К1, К2, αТ, ΩН - параметры, аналогичные функции F1 (1);
δЗН - релейная функция, формируемая на выходе реле с зоной нечувствительности 22, знак которой определяется знаком ошибки наведения;
для F2 ≥ 1 поддерживается алгоритм торможения пушки, для F1<1 обеспечивается наведение пушки.
Таким образом, реализуется алгоритм эффективного торможения пушки за счет одновременной работы тормоза, гидромотора в функции от величин: угла движения пушки в зоне торможения, скорости движения пушки и ошибки наведения.
Возобновление процесса наведения пушки с заданной точностью в зоне углов торможения при движении от упора осуществляется после изменения полярности напряжения ошибки наведения на выходе измерительного устройства 1, которое вызывает срабатывание реле с зоной нечувствительности 22, на его выходе изменяется полярность напряжения, которое через второй вход открытого ключа 21 поступает на второй вход реле с временной задержкой 16, обеспечивая выполнение условия F2<1, вызывает срабатывание этого реле и изменение на его выходе полярности напряжения, при этом:
схема ограничения углов 3, управляемая по входу 2, обеспечивает прохождение управляющего воздействия с выхода предварительного усилителя 2 на выходной усилитель и далее на гидромотор 7;
блок селекции 19 выключает тормоз 20, обеспечивая возможность движения выходных валов редуктора 8 и пушки 9 в сторону от упора, при вращении гидромотора 7 пушка начинает двигаться от упора;
интегратор 18, управляемый по входу 1, устанавливается в нулевые начальные условия, его работа блокируется, на выходе его устанавливается
нулевое напряжение, исчезает дополнительная обратная связь по угловому положению пушки;
ключ 21, управляемый по входу 1, закрывается и блокирует прохождение выходного напряжения от реле с зоной нечувствительности 22 на второй вход реле с временной задержкой 16, восстанавливая действие условия торможения F1 ≥ 1 (1) с временной задержкой, и процесс переключении повторяется вновь.
Таким образом, на выходе реле с временной задержкой 16 наблюдаются периодические колебания полярности напряжения. Но в момент выполнения условия F2<1 (2) управляющее воздействие вызывает отключение тормоза 20 и вращение гидромотора 7, пушка 9 движется от упора. В момент, когда обеспечивается выполнение F1<1 (1) без учета релейной функции δЗН на выходе реле с временной задержкой 16 колебания напряжения исчезнут и установится знак напряжения, соответствующий режиму наведения пушки с заданной точностью. Гистерезис функции наведения при снятии с упора определяется зоной нечувствительности реле 22 и составляет не более 4 т.д.
Таким образом, в предлагаемой артиллерийской установке осуществляется увеличение зоны стрельбы по углу наведения пушки за счет обеспечения возможности точной стрельбы в зоне углов торможения как при движении на упор, так и при движении от упора. В предлагаемой установке отсутствует остаточная скорость движения пушки после завершения процесса торможения. Артиллерийская установка практически не имеет гистерезиса функции наведения при снятии с упора. Обеспечение этих характеристик имеет большое практическое значение при создании артиллерийских комплексов, в первую очередь, увеличивая площадь диаграммы обстрела, повышается надежность эксплуатации составных частей комплекса. Реализация предлагаемых технических решений в опытном образце показала высокую эффективность и надежность работы артиллерийской установки. Зона наведения точной стрельбы в вертикальной плоскости увеличена на 8% по сравнению с аналогами, остаточные скорости после торможения отсутствуют, гистерезис процесса снятия с упора не более 4 т.д.
Литература
1. 30-мм облегченная автоматическая артиллерийская установка АК-306. Техническое описание и инструкция по эксплуатации АК-306 ТО.
2. 30-мм облегченная автоматическая артиллерийская установка АК-306. Техническое описание. Приложение. Альбом рисунков АК-306 Т01.
3. 3СУ-23-4М. Силовые приводы наведения 2Э2. Техническое описание ПБ 1.452.010 ТО.
4. 3СУ-23-4М. Силовые приводы наведения 2Э2. Альбом рисунков к техническому описанию ПБ 1.452.010 ТО.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1987 |
|
RU2226715C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СКОРОСТЯМИ И УГЛАМИ НАВЕДЕНИЯ АРТУСТАНОВКИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203470C2 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2002 |
|
RU2230279C1 |
| Двухканальная следящая система | 1984 |
|
SU1241188A1 |
Изобретение относится к области артиллерийских установок с автоматическим наведением пушки и может быть использовано в электрогидравлических следящих приводах для наведения объектов с ограниченным углом поворота. Изобретение направлено на увеличение зоны поражения артиллерийской установки за счет возможности точной стрельбы в зоне углов торможения и исключения остаточной скорости движения пушки после ее торможения около упоров. Увеличение зоны стрельбы по углу наведения пушки за счет углов торможения и исключение остаточных скоростей достигнуто формированием команды на торможение при подходе к упорам в функции от скорости движения пушки, угла поворота пушки в зоне торможения, ошибки наведения и подключения тормоза к валу нагрузки. 2 ил.
Артиллерийская установка, содержащая последовательно соединенные измерительное устройство с первым входом для управляющего воздействия, предварительный усилитель, схему ограничения углов, выходной усилитель, управляющий электромагнит, насос с механизмом управления, гидромотор, редуктор, объект управления, причем второй выход редуктора подключен к второму входу измерительного устройства и к последовательно соединенным принимающему тахогенератору и корректирующему контуру, а также ограничитель углов, отличающаяся тем, что в нее введены измеритель углов, коммутатор, сумматор, реле с временной задержкой, согласующее устройство, интегратор, блок селекции, тормоз, ключ, реле с зоной нечувствительности, причем выход корректирующего контура подключен к второму входу выходного усилителя, третий выход редуктора соединен с входом ограничителя углов и с входом измерителя углов, а выход измерителя углов через последовательно соединенные коммутатор, сумматор, реле с временной задержкой, согласующее устройство и интегратор соединен с третьим входом выходного усилителя, выход согласующего устройства также соединен с вторым входом схемы ограничения углов и с входом блока селекции, выход которого соединен с входом тормоза, выход которого соединен со вторым входом редуктора, выход реле с временной задержкой также соединен с первым входом ключа, выход измерительного устройства через реле с зоной нечувствительности также соединен со вторым входом ключа, выход которого соединен с вторым входом реле с временной задержкой, выход принимающего тахогенератора также соединен со вторыми входами интегратора и коммутатора, третий вход которого соединен с выходом ограничителя углов и с третьим входом реле с временной задержкой.
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| ТО | |||
| - М.: Воентехиздат, 1977, с.1-14, 35-41, 85, 86, рис.2 | |||
| US 5210371 А, 11.05.1993 | |||
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "САЛАТ С КРАБАМИ" | 2013 |
|
RU2511141C1 |
| DE 3536858 С1, 06.11.1986. | |||

