(54) РАБОЧИЙ ОРГАН МАШИНЬ ДЛЯ СБОРА ПЛОДОВ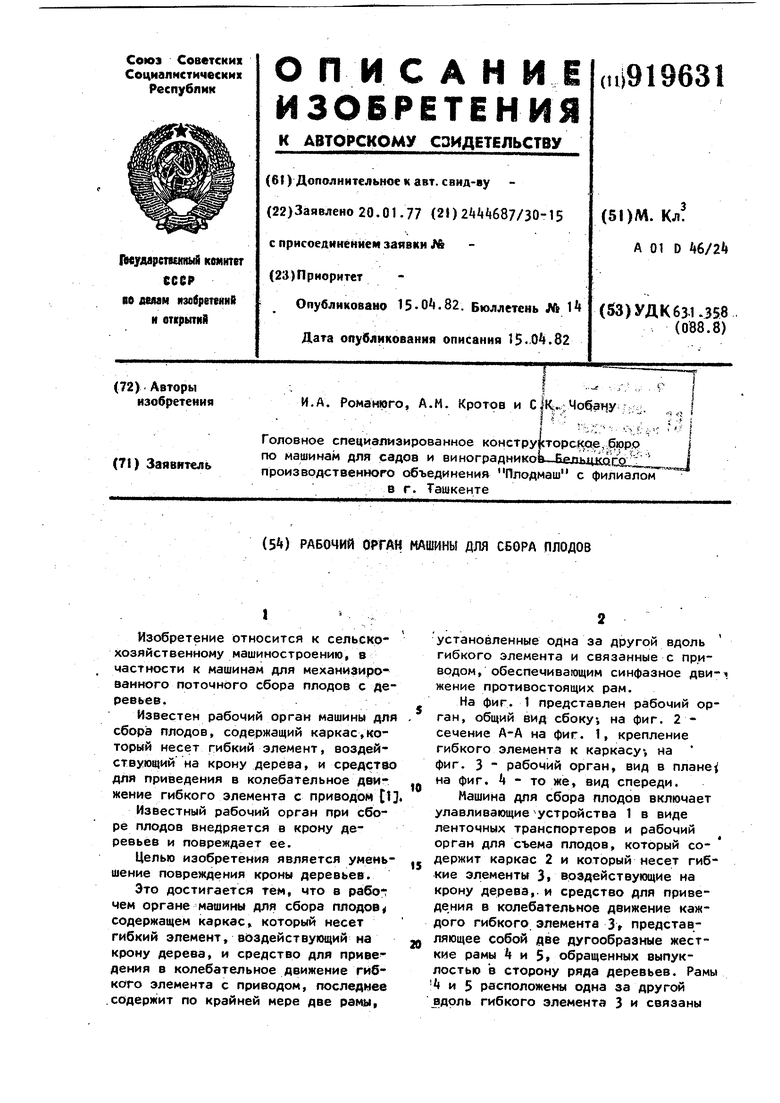
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сбора плодов | 1980 |
|
SU938814A1 |
| УСТРОЙСТВО ДЛЯ СБОРА ПЛОДОВ | 1973 |
|
SU376058A1 |
| РОТАЦИОННЫЙ ВСТРЯХИВАТЕЛЬ УСТРОЙСТВА ДЛЯ УБОРКИ ПЛОДОВ ЛЕСНЫХ КУЛЬТУР | 2007 |
|
RU2370016C2 |
| Машина для съема плодов пульсирующим воздушным потоком | 1982 |
|
SU1159507A1 |
| УСТРОЙСТВО ДЛЯ УБОРКИ ПЛОДОВ ФУНДУКА | 1992 |
|
RU2076567C1 |
| Устройство для уборки плодов | 1990 |
|
SU1813349A1 |
| Встряхиватель плодов | 1979 |
|
SU782736A1 |
| Универсальная садовая машина | 1981 |
|
SU942625A1 |
| Устройство для уборки плодов | 1977 |
|
SU635919A1 |
| Стряхиватель плодов | 1990 |
|
SU1802995A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для механизированного поточного сбора плодов с деревьев.
Известен рабочий орган машины для сбора плодов, содержащий каркас Который несет гибкий элемент, воздействующий на крону дерева, и средство для приведения в колебательное движение гибкого элемента с приводом tij.
Известный рабочий орган при сборе плодов внедряется в крону деревьев и повреждает ее.
Целью изобретения является уменьшение повреждения кроны деревьев.
Это достигается тем, что в чем органе машины для сбора плодов содержащем каркас,, который несет гибкий элемент, воздействующий на крону дерева, и средство для приведения в колебательное движение гибкого элемента с приводом, последнее .содержит по крайней мере две рамы,
установленные одна за другой вдоль гибкого элемента и связанные с приводом, обеспечивающим синфазное движение противостоящих рам.
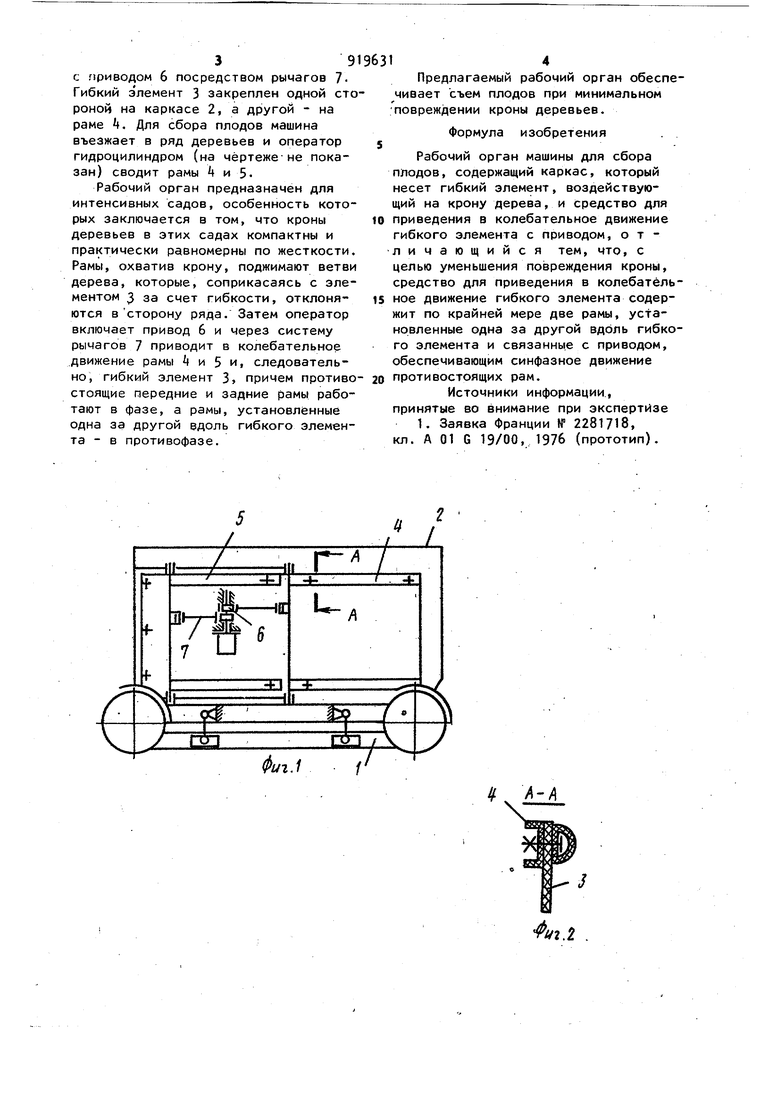
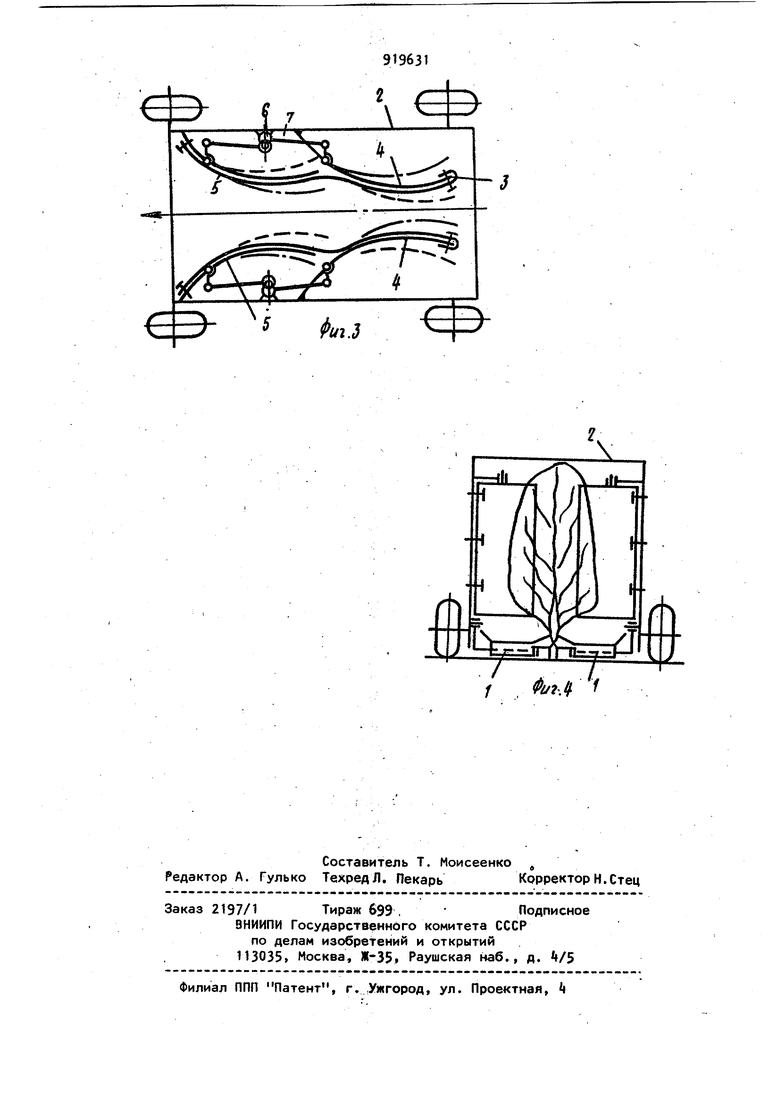
На фиг. 1 представлен рабочий орган, общий вид сбоку, на фиг. 2 сечение А-А на фиг. 1, крепление гибкого элемента к каркасу, на фиг. 3 рабочий орган, вид в планер на фиг. 4 - то же, вид спереди.
)0
Машина для сбора плодов включает улавливающие устройства 1 в виде ленточных транспортеров и рабочий орган для съема плодов, который содержит каркас 2 и который несет гиб1$кие элементы 3 воздействующие на крону дерева,, и средство для приведе,ния в колебательное движение каждого гибкого элемента 3 представляющее собой две дугообразные жест20кие рамы 4 и 5 обращенных выпуклостью в сторону ряда деревьев. Рамы 4 и 5 расположены одна за другой Jвдoль гибкого элемента 3 и связаны 39 с гфиводом 6 посредством рычагов 7Гибкий элемент 3 закреплен одной сто роной на каркасе 2, а другой - на раме , Для сбора плодов машина въезжает в ряд деревьев и оператор гидроцилиндром (на чертеже-не показан) сводит рамы 4 и 5Рабочий орган предназначен для интенсивных садов, особенность кото рых заключается в том, что кроны деревьев в этих садах компактны и практически равномерны по жесткости Рамы, охватив крону, поджимают ветви дерева, которые, соприкасаясь с элементом 3 за счет гибкости, отклоняются всторону ряда. Затем оператор включает привод 6 и через систему рычагов 7 приводит в колебательное .движение рамы и 5 и, следовательно, гибкий элемент 3 причем противо стоящие передние и задние рамы работают в фазе, а рамы, установленные одна за другой вдоль гибкого элемента - в противофазе. 4 Предлагаемый рабочий орган обеспечивает съем плодов при минимальном повреждении кроны деревьев. Формула изобретения Рабочий орган машины для сбора плодов, содержащий каркас, который несет гибкий элемент, воздействующий на крону дерева, и средство для приведения в колебательное движение гибкого элемента с приводом, отличающийся тем, что, с целью уменьшения повреждения кроны, средство для приведения в колебатёльное движение гибкого элемента содержит по крайней мере две рамы, yctaновленные одна за другой вдоль гибкого элемента и связанные с приводом, обеспечивающим синфазное движение противостоящих рам. Источники информации, принятые во внимание при экспертизе 1. Заявка Франции № 2281718, кл. А 01 G 19/00, 1976 (прототип).
А2.2 .
/ ФигЛ f
