(54) УСТРОЙСТВО ДЛЯ УБОРКИ ПЛОДОВ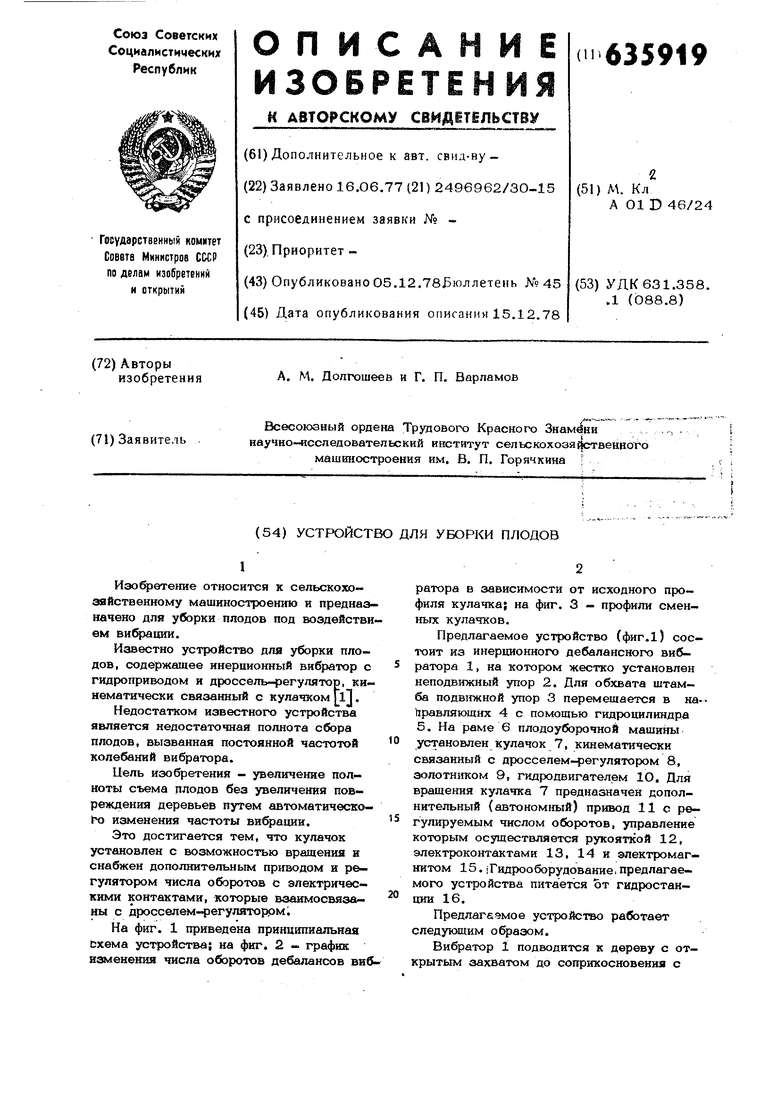
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стряхивания плодов | 1977 |
|
SU674719A1 |
| Устройство для стряхивания плодов | 1980 |
|
SU873954A2 |
| Турельный стряхиватель плодов с деревьев | 1981 |
|
SU959676A2 |
| Устройство для стряхивания плодов | 1981 |
|
SU990126A1 |
| Способ стряхивания плодов с деревьев | 1980 |
|
SU934977A1 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
| СТРЯХИВАТЕЛЬ К ПЛОДОУБОРОЧНОЙ МАШИНЕ | 1972 |
|
SU434915A1 |
| Встряхиватель | 1980 |
|
SU1041064A1 |
| СТРЯХИВАТЕЛЬ ПЛОДОВ | 1993 |
|
RU2081550C1 |
| Инерционный стряхиватель | 1984 |
|
SU1346070A2 |
Иэофетение относится к сельскозюэяйственному машиностроению и преднаэ начено для уборки плодов под воздействием вибрашш.
Известно устройство для уборки плодов, содержащее инерционный вибратор с гидроприводом и дроссель-регулятор, кинематически связанный с кулачком .
Недостатком известного устройства является недостаточная полнота сбора плодов, вызванная постоянной частотой колебаний вибратора.
Цель изобретения - увеличение полноты съема плодов без увеличения повреждения деревьев путем автоматического изменения частоты вибрации.
Это достигается тем, что кулачок установлен с возможностью вращения и снабжен дополнительным пр1гаодом и регулятором числа оборотов с электрическими контактами, которые взаимосвязаны с дросселем-регулятором.
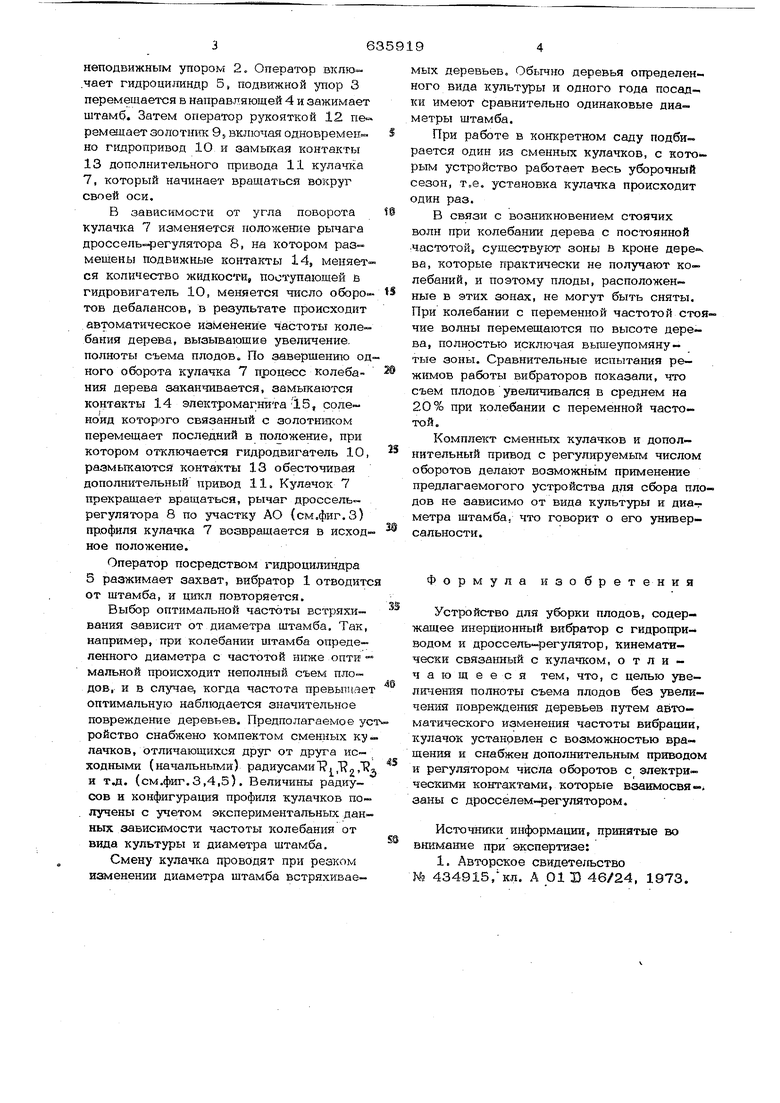
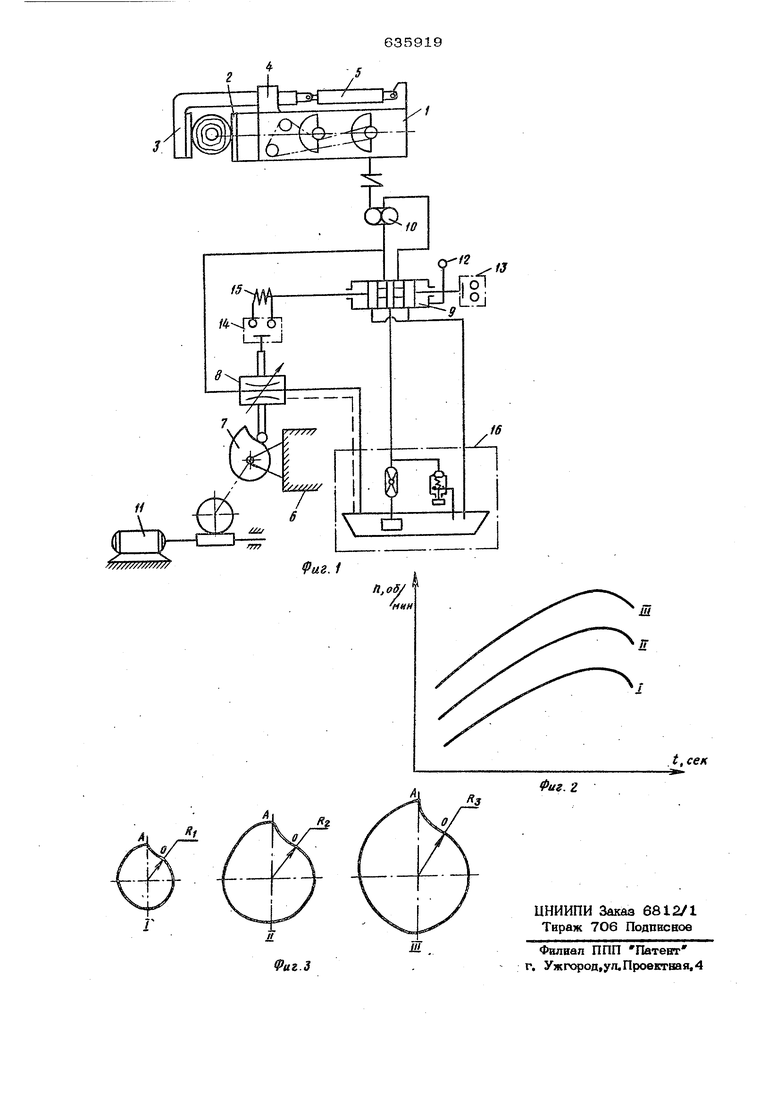
На фиг. 1 приведена принципиальная схема устройства; на фиг. 2 - график изменения числа оборотов небалансов вибратора в зависимости от исходного профиля кулачка; на фиг. 3 - профили сменных кулачков.
Предлагаемое устройство (фиг.1) состоит из инерционного дебалансного вибратора 1, на котором жестко установлен неподвижный упор 2. Для обхвата штамба подвижной упор 3 перемешается в на)1раБлякяцнх 4 с помощью гидроцилиндра 5. На раме 6 плодоуборочной машины установлен кулачок 7, кинематически связанный с дросселем-регулятором 8, золотн1псом 9, гидродвигателем 1О. Для вращения кулачка 7 предназначен дополнительный (автономный) привод 11 с регулируемым числом оборотов, управление которым осуществляется рукояткой 12, электроконтактами 13, 14 и электромагнитом 15. )Тидрооборудование,предлагаемого устройства питается от гидростанции 16.
Предлагеэмое устройство работает следующим офазом.
Вибратор 1 подводится к дереву с открытым захватом до соприкосновения с
неподвижным упором 2, Операгор вкпю .чает гидроци шндр 5, подвткной утюр 3 перемещается в направляющей 4 и зажимает штамб. Затем оператор рукояткой 12 пе ремш1ает золотник 9, включая одно времен. но гидропривод 1О и замыкая контакты 13 дополнительного привода 11 кулачка 7, который начинает вращаться вокруг своей оси,
В зависимости от угла поворота кулачка 7 изменяется положение рычага дроссель-регулятора 8, на котором размешены подвижные контакты 14, меняется количество жидкости, поступающей в гидровигатель 1О, меняется число оборотов дебалансов, в результате происходит автоматическое измененй е частоты колебания дерева, вызывающие увеличение, полноты съема плодов. По завершению одного оборота кулачка 7 процесс колебания дерева заканчивается, замыкаются контакты 14 электромагнита15, соленоид которого связанный с золотником перемещает последний в положение, при котором отключается гидродвигатель 10, размьтаются контакты 13 обесточивая дополнительный привод 11. Кулачок 7 прекращает вращаться, рычаг дроссельрегулятора 8 по участку АО {см.фиг.З) профиля кулачка 7 возвращается в исходное положение.
Оператор посредством гидроцилиндра S разжимает захват, вибратор 1 отводитс от щтамба, и цикл повторяется.
Выбор оптимальной частоты встряхивания зависит от диаметра штамба. Так, например, при колебании штамба определенного диаметра с частотой ниже опти мальвой происходит неполный съем плодов, и в спучае, когда частота превышает оптимальную наблюдается значительное повреждение деревьев. Предполагаемое ус ройство снабжено компектом сменных кулачков, отличающихся друг от друга исходными (начальными) радиусами Т 1,,Т и т.д. (см.фиг.З,4,5). Величины радиусов и конфигурация профиля кулачков получены с учетом экспериментальных данных зависимости частоты 7юлебания от
вида культуры и диаметра штамба,
Смену кулачка проводят при резком изменении диаметра щтамба встряхиваемых деревьев. Обычно деревья определенного вида культуры и одного года посадки имеют Сравнительно одинаковые диаметры штамба.
При работе в конкретном саду подби рвется один из сменных кулачков, с которым устройство работает весь уборочный сезон, т.е. установка кулачка происходит один раз.
В связи с возникновением стоячих волн при колебании дерева с постоянной Частотой существуют зоны в кроне дере ва, которые гфактически не получают колебаний, и поэтому плоды, расположенные в этих зонах, не могут быть сняты. При колебании с переменной частотой сточие волны перемещаются по высоте дерева, полностью исключая вышеупомянутые зоны. Сравнительные испытания режимов работы вибраторов показали, что съем плодов увеличивался в среднем на 20% при колебании с переменной частотой.
Комплект сменных кулачков и дополнительный привод с регулируемым числом оборотов делают возможным применение предлагаемогого устройства для сбора плдов не зависимо от вида культуры и диаметра щтамба. что говорит о его универсальности.
Формула изобретения
Устройство для уборки плодов, содержащее инерционный вибратор с гидроприводом и дроссель-регулятор, кинематически связанный с кулачком, отличающееся тем, что, с целью увеличения полноты съема плодов без увеличения поврежде1лш деревьев путем автоматического изменения частоты вибрации, 1сулачок установлен с возможностью вращения и снабжен дополнительным приводом и регулятором числа оборотов с электрическими контактами, которые взаимосвя- эаны с дросселем-регулятором.
Источники информации, принятые во внимание при экспертизе:
