(54) СПОСОБ СИНХРОНИЗАЦИИ ИСПОЛНИТЕЛЬНЫХ
Изобретение относится к системам управления и регулирования, обеспечивающих синхронизацию движения не-, скольких исполнительных органов.
Известны гидравлические системы синхронизации.движения. Синхронизация движения исполнительных органов осуществляется подводом к каждому из них одинакового давления жидкое- . ти, что осуществляется дросселированием потока на делителях, установленных на линии питания каждого ис- полнительного органа tl.
Однако эти сястемы поддерживают лишь одинаковое давление жидкости в управляющих полостях исполнительных органов г не контролируя синхронизацию движения штоков и, как следствие, не обеспечивают необходимой синхронности их движения.
Известен способ синхронизации, . осуществляемый в устройстве для синхронизации гидроцилиндров. В нем производится измерение положения каждого гидроцилиндра относительно базовой точки. Выходы измерительных элементов соединены с общим элементом выделения минимального сигнала рассогласования и одним из выходов суммирующих элементов, на второй вход которых подается сигнал от обще-. .ОРГАНОВ
го элемента вьвделения минимального сигнала рассогласования. Подача рабочей жидкости в гидроцилиндры осуществляется через электрогидравлические регуляторы, открытием регулирующего органа которых управляют суммирующие элементы. На последних происходит формирование сигнала, равного разности положения данногр гидроцилиндра и наиболее отставшегр.
10 Если при своем движении гидроцилиндры опережают базовую точку, то электрогидравлические регуляторы уменьшают подачу рабочей жидкости,, что приводит к торможению опережающих
15 гидроцилиндров. Если при движении они отстают, то электрогидравлические регуляторы увеличивают подачу рабочей жидкости. Кроме того, в 2Q рассматриваемом устройстве с выхо. да измерительных элементов через диоды проходит сигнал, спос:обствующий разгону двигателей гидронасосов от заданной им первоначальной скорости. Последнее приводит к более
25 интенсивному втягиванию в синхронизм всех отставших гидроцилиндров 2.
Однако синхронизация гидроцилиндров по описанной схеме является сложной, так как ее осуществление
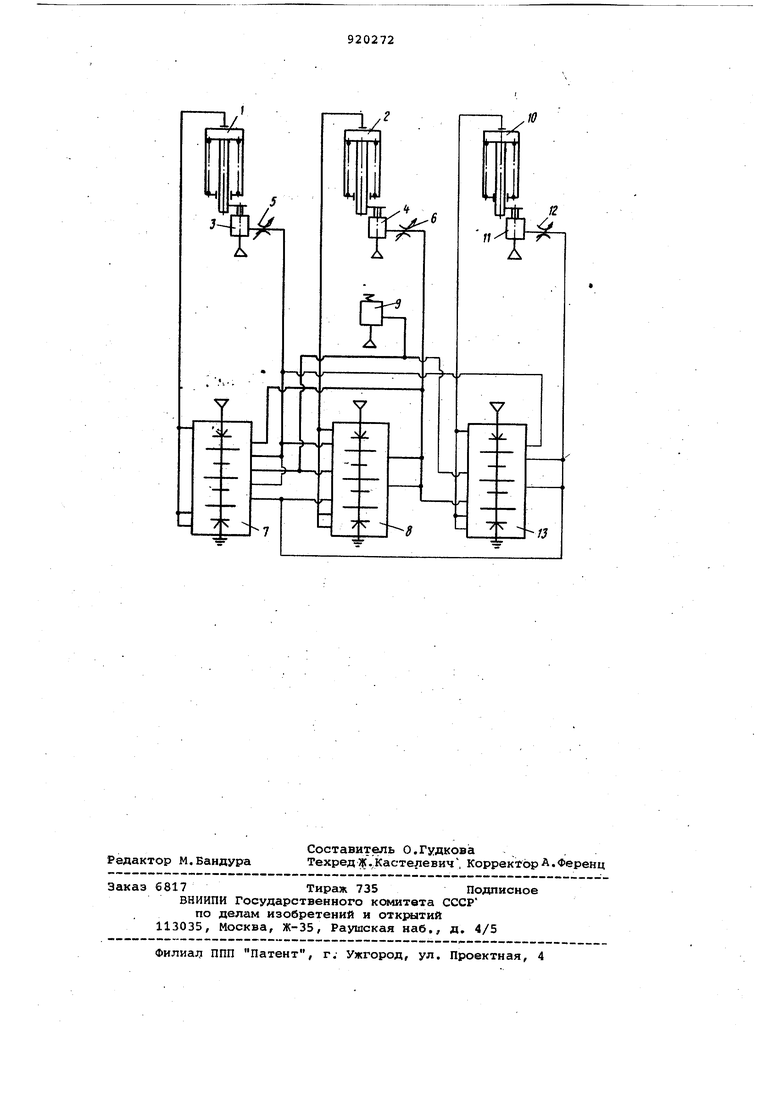
30 требует последовательно: сравиенич положения гидроцилиндров относительно базовой точки; выделения, наиболее отставшего гидроцилиидра и формирования на сумматоре регулирующего воз действия, пропорционального величине рассогласования положений данного гидроцилиндра и наиболее отставшего. Такая сложная схема выработки регулирующего воздействия уменьшает надежность устройства и его быстродействие., Цель изобретения - повышение быстродействия синхронизации движения исполнительных органов. Поставленная цель достигается тем, что согласно способу синхронизации исполнительных органов подачу рабочей среды в остальные исполнительные органы изменяют .пропорционал но полученному управлякицёму сигналу. На чертеже изображена схема синхронизации исполнительных органов по предлагаемому способу, вариант. На исполнительных органах 1 и 2 установлены датчики 3 и 4 положения. На выходе последних включены переманные дроссели 5 и 6, служащие для регулировки скорости движения исполнительных органов 1 и 2. Управление исполнительными органами осуществляется от элементов 7 и 8 сравнения, включённых по схеме алгебраического сложения. Выходы элемента 7 сравнени соединены: надмембранные полости - с выходом задатчика 9, служащего для задания общего управляющего сигнала на перемещение исполнительных органо и с выходом датчика 4 положения, под мембранная полость - с выходом датчика положения 3. Выход элемента 7 сравнения соединен с управляемой полостью исполнительного органа 1. Выходы элемента 8 сравнения Соединены надмембранные полости - с. выходом за датчика 9 и датчика положения 3, под мембранная - с выходом датчика положения 4. Выход элемента сравнения 8 соединен с управляющей полостью исполнительного органа 2. В схему синх ронизации по предлагаемому способу может входить и большее число исполнительных органов. На схеме тонкой линией показано подключение третьего исполнительного органа 10 с датчиком 11 положения, переменным дросселем 12 и элементом сравнения 13. Для пояснения структуры схемы рас смотрим по отдельности варианты синхронизации исполнительных органов 1 и 2, 1 и 10,2 и 10. Для схемы синхронизации исполнительных органов 1 и 2 можно состави1 уравнений, определяющие давления на выходе элементов сравнения 7 и 8 РО + (4 - РЗ) РО - (РЭ, - где Р и Р - сигналы, поступающие на исполнительные органы 1 и 2 РО - сигнал от задатчика 9; РЗ и Р - сигналы на выходе датчиков положения 3 и 4. Аналогично для схем синхронизации исполнительных органов 1 и 10, 2 и 10 можно записать Р РО + (PF - РЗ) 0 РО + (РЗ - ) Ра - РО + (Р,,- Р4). РЮ - РО + СР - Р-,,), где сигнал, поступающий на исполнительный орган 10; Р сигнал на выходе датчика 11 положения. Суммируя попарно выражения для сигналов, поступающих на одни и те же исполнительные органы, и, учитывая, что на каждый исполнительный орган сигнал поступает от одного элемента сравнения, получим выражения для суммарных сигналов, поступающих, на исполнительные органы 1, 2 и 10 SP РО + СР4 - РЗ + CP-it- РЗ PQ + Р + Р- 2Рз f SPq. РО + (РЗ --Р4) (Pll- Р4) РО РЗ Рщ- 2Р4. 2,, РО (РЗ - P, + (Р4 - Рц) РО + РЗ Р4 - 2Р. Согласно трем последним выражениям и построена схема синхронизации трех исполнительных органов. Нетрудно видеть, что для п исполнительных органов суммарное воздействие на каждый исполнительный орган имеет вид ,ар, РО + Р4 р, - ... - РП - -(п т 1)P.j, СР РО,+ РЗ - Pi + ... + РП -(п - 1)Р.4 И Т.Д. Синхронизация исполнительных органов происходит следующим образом. При синхронной работе исполнительных органов 1 и 2 сигналы на выходе датчиков 3 и 4 положения равны и на выходе элементов 7 и 8 сравнения формируются выходные сигналы, равные задающему управляющему, сигналу, поступающему от задатчика 9. При отставании или опережении одного из исполнительных органов происходит следующее. Пусть исполнительный орган 1 опережает исполнительный орган 2. При этом давление на выходе датчика 3 положения уьеличивается. Тогда в подмембранную полость элемента 7 сравнения подается увеличивающийся сигнал Р. , а на его выходе формируется сигнсШ, направленный на уменьшение
регулирующего воздействия на исполнительный орган 1. Последнее приводит к заземлению его перемещения, а в общем случае, и к его движению в обратную сторону, которое, в свою ;очередь, вызывает уменьшение сигнала Pj. Одновременно сигнал Pj подается в надмембранную полость элемента 8 сравнения, на выходе которого формируется сигнал, направленный на увеличение регулирующего воздействия на исполнительный орган 2. Перемещение последнего приводит к возрастанию сигнала Р . Формирование сигналов РЗ и Р4 приводит к встречному движению исполнительных органов, которые оканчиваются тогда, когда выравниваются сигналы Р и Р датчиков положения. Переменные дроссели 5 и б предварительно регулируются таким образом, чтобы процесс синхронизации исполнительных органов протекал плавно, без перерегулирования. Синхронизация трех и более исполнительных органов протекает аналогично.
За счет встречного движения ист полнительных органов к синхронизи- рованному положению, быстродействие способа высокое. Это можно пояснить расчетом быстродействия синхрониза ции исполнительных органов 1 и 2 при введении внешнего возмущения.
Принудительно отклоним исполни1тельный орган 1 на а единиц от синхронизированного Положения, а орган 2 - на Ъ единиц.
- О - положение обоих исполнительных органов до введения возмущения (положение базовой точки для прототипа);
-О - отклонение исполнительного органа 1;
-О - отклонение исполнительного органа 2.
Пути, проходимые исполнительными органами.1 и 2 для восстановления синхронизации, в случае прототипа 5л а: 5я Ь. а в описанном спосо - b а. . . b - а
b I I г.а
Учитывая, что при работе величины а и b близки по абсолютной величине, Si и Si S, и SQ. ВВИДУ изложенного, при прочих равных условиях быстродействие по приведенному способу существенно выше.
Формула изобретения
Способ синхронизации исполнительных органов путем изменения подачи рабочей среды в один из них пропорционально управляющему сигналу, равному сумме задающего сигна ла и корректирующего сигнала, пропорционального разности сигналов положения регулирующих органов, бтличающийс я тем, что, с целью повышения быстродействия способа, подачу рабочей среды в остальные исполнительные органы изменяют пропорционешьно полученному управляющему сигналу.
Источники информации,
принятые во внимание при экспертизе
1.Гамынин Г.С. и др. Гидравличвский следящий привод. М., Маиностроение, 1968, с. 303, ис. 4.65.
2.Авторское свидетельство СССР
№496381, кл. F 15 В 11/22, 1973 (прототип).
I
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД | 1992 |
|
RU2072544C1 |
| Система управления гидравлическим прессом | 1978 |
|
SU727478A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1988 |
|
SU1574482A1 |
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| Устройство для синхронизации гидроцилиндров | 1974 |
|
SU496381A1 |
| Способ автоматического управления процессом очистки сока в свеклосахарном производстве | 1990 |
|
SU1712421A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| УСТРОЙСТВО ГРУППОВОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 1971 |
|
SU298029A1 |
| Устройство для программного управления многодвигательным гидроприводом | 1986 |
|
SU1425605A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ПРИВОДА РЕГУЛИРУЮЩЕГО ОРГАНА | 2008 |
|
RU2366820C1 |
15
Js
