4
ю л
OS
,3-1.0 1,3-2 , и п,Ъ-2, и К4-2, и п.4-2 и 1,5-2,
Изобретение относится к области автоматики и мелеет быть использовано для программного .у1яравления многодвигательным приводом различных машин о
Цель изобретения - расширение функциональных возможностей устройства.
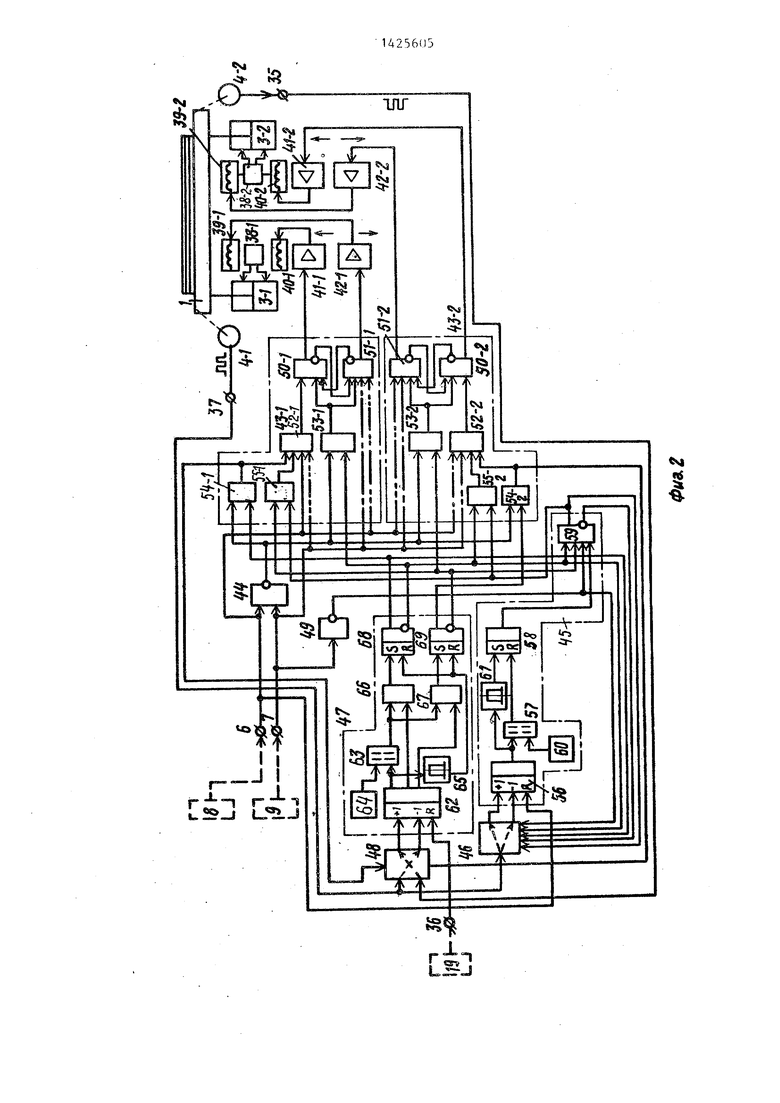
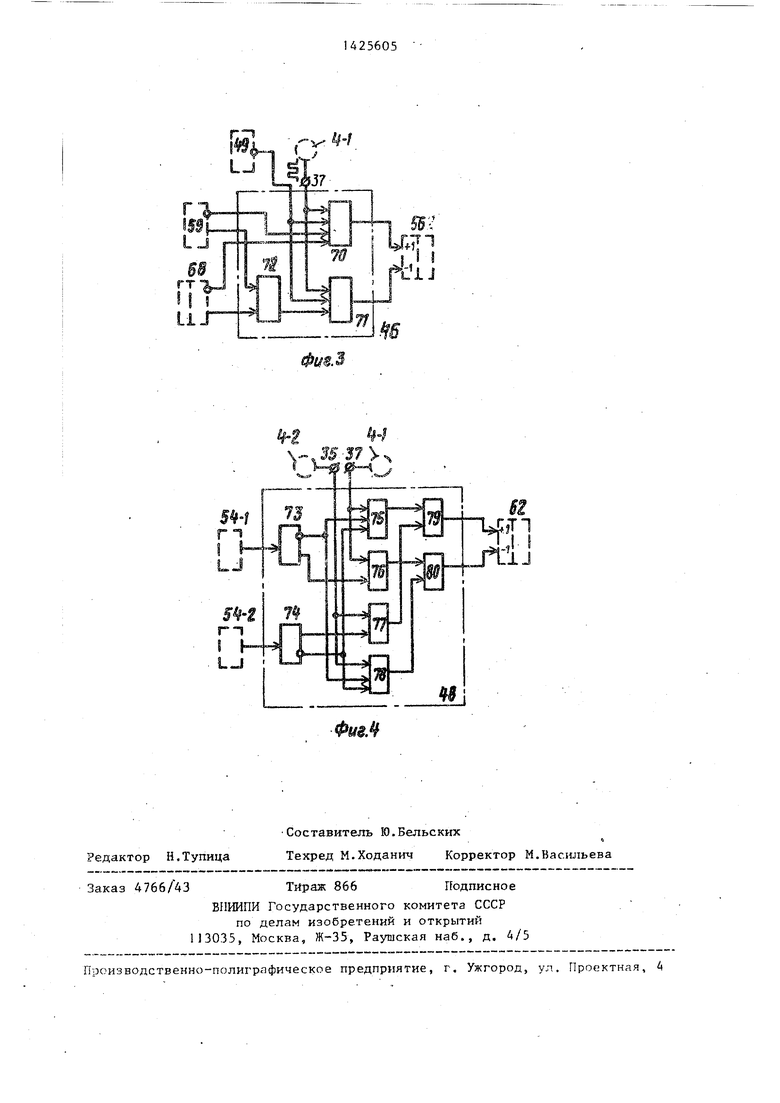
На фиг.1 представлена функциональная схема устройства| на фиг.2 функциональная схема узла управления; на фиГоЗ и 4 - функциональные схемЫу соответственно5 первого и второго блоков реверса.
Устройство содержит (.фиг, |) исполнительные органы 1.1 г 2,1,,,, . 5 п. Is узлы К25 2.2,,,,. п.2 управления, гидроцилиндры 1 2.3-1 и 2.3-2.,... S.п. импульсные датчики 1,4-1 2,4-1 и 2.4-2,,.,. 5 п.4-1 перемещения,, датчики 1,5-1 2.5-1 и 2.5-2,,.,, п,5-1 и п.5-2 начального положения перньш 6 и второй 7 :7правляющие вхс.ды узлов упра вления, первые элементы И 1.8,) 2 85.,., п,8 и вторые элементы И 1.9, 2.9,.„.:, П.95 первый 10 и второй 11 триггеры, блоки 1.12. j (п-1),12 синхронизации, блок 13 уп- равления блок 14 задаш-1я программы, счетчик 15, нуль-орган 16;, третий элемент И 17, элемент ИЛИ 18,, четвертый элемент И 19,
Блоки синхронизации 1 ,. 1 2 „. , j (ii-1),12 аналогичны и содержат (фиг,1) реверсивный счетчик 20 за- датчик 21 зоны нечувствительности, элемент 22 сравнения нуль-орган 23 первый 24 и второй 25 элементы И, первый 26 и второй 27 триггеры, R- вход 28 триггеров 26 и 27,, первый 29, второй Зи и третий 31 управляющие входы блока первый 32 и второй
33управляющие выходы блока, вход
34сброса блока,
Узлы 1.2, 2.2,,, п.2 у11г авле- ния (фиг.1 и 2) аналогичны и содержат первый 35, второй 36 и третий 37 установочные входы, реверсивные золотники 38-1 и 38-25 электромагниты 39-1, 39-2, 40-1 и 40-2, усилители 41-15 41-2 42-1 и 42--2, логические блоки и 43-2, элемент ИЛИ-НЕ 44, блок 45 компенсации самохода, первый блок 46 реверса, блок
47устранения перекоса j, второй блок
48реверса, инвертор,49.
Логические блоки 43-1 и 43-2 (фиг.2) аналогичные и содержат первые элементы И 50-1, 50-2, 51-1 и 51-2, элементы ИЛИ 52-1, 52-2, 53-1 и 53-2, вторые элементы И 54-1, 54-2, 55-1 и 55-2.
Блок 45 компенсации самохода (фиг.2) содержит счетчик 56, элемент
IQ 57 совпадения, триггер 58, элемент И 59, задатчик 6U зоны нечувствительности,, нуль-орган 61.
Блок 47 устранения перекоса (фиг.2) содержит счетчик 62, элемент
15 63 совпадения, задатчик 64 зоны нечувствительности, нуль-орган 65, первый 66 и второй 67 элементы И, первый 68 и второй 69 триггеры. Первый блок 46 реверса (фиг.З)
20 содержит первый 70 и второй 71 элементы И, элемент ИЛИ 72,
Второй блок 48 реверса (фиг.4) содержит первый 73 и второй 74 пов- , торитепи, первый 75 и второй 76,
25 третий 77 и четвертый 78 элементы И, первый 79 и второй 80 элементы И, Устройство работает следующим , образом,
При программных перемещениях ис30 полнительньсх органов 1,1, 2.1,..., П.1 (опускании или подъеме) подаются команды с первого выхода блока 13 управления (фиг.1) на управляющий вход счетчика 15. По такой команде из блока 14 задания программы в .
счетчик 15 вводится чисЛо, пропорцн ональное заданной величине программного переметцения исполнительных органов 1.1, 2,1,,.., П.1, и по сигналу с инверсного выхода нуль-органа 16 срабатьгоает триггер 11. По сигналу триггера 11 через элементы И 1о9, 2.9,..., п.9, входы 7 узлов 1.2, 2.,2,.,,, п.2 управления, элементы И 51-1, 51-2 блоков 43-1 и 43-2 (фиг.2) срабатьшают усилители 42-1 и 42-2 и электромагниты 39-1 и 39-2 при программном опускании исполнительных органов 1.1, 2.1,..., п.1 или через элементы ИЛИ 52-1 и
0 52-2 и элементы И 50-1 и 50-2 срабатывают усилители 41-1 и 41-2 и электромагниты 4U-1 и 40-2 при программном подъеме исполнительных органов 1.1, 2.1,..., п.1.
5 При этом гидроцнлиндры 3-1 и 3-2 начинают опускать или поднимать не . полнительные органы 1.1, 2.1..., п 1,, а в счетчик 15 (фиг,1) начинают
0
5
поступать импульсы датчика 1.4-1 перемещения исполнительного органа 1.1, списьгоающие введенное в счетчик 15 число. При списании этого числа до нуля, т.е. при перемещении исполнительных органов 1.1, 2,15.., П.1 на заданную величину, срабатывает нуль-орган 16, по сигналу которого через элемент И 17 отключается триггер 11 и блокируется счетньш вход счетчика 15. При этом отключаются соответствующие электромагниты 39-1, 39-2 либо 40-1, 40-2 и исполнительные органы 1.15 2.1,..,, П.1 останавливаются.
В процессе перемещения исполнительных органов 1.1, 2.1,..., П.1 (фигИ) контроль за их синхронным ходом осуществляется блоками 1.12, ..., (п-1).12 синхронизации. При этом блок 1,12 синхронизации контролирует синхронный ход исполнительных органов 1.1 и 2,1, блок 2.12 синхронизации контролирует синхрон- ньй ход исполнительных органов 1,1 и 3,1 и т.д., блок (п-1),12 синхронизации контролирует синхронный ход исполнительных органов 1 .М и п,1. Таким образом, блоками 1.1 2 j .,j (п-1)о 12 синхронизации контролируется синхронный ход исполнительных органов- соответственно 2.1,.,., П.1 относительно исполнительного органа 1.1.
Рассмотрим при этом работу блоков 1,1250.., (п-1).12 синхронизации на примере блока синхронизации 1.12, так как все остальные функционируют аналогично. Блоки 1,12,..., Сп-1).12 синхронизации начинают функционировать при появлении сигналов на выходе триггеров 10 или 11 и, соответственно, на выходе элемента ИЖ 18. Если, например, в процессе перемещения по сигналу от триггера 11 исполнительный орган 2.1 опережает исполнительный орган 1.1, то счетчик 20 в блоке 1.12 (фиг.1) начинает накапливать число со знаком минус, поскольку датчик 2.4-1 подключен к счетному входу - счетчика 20, в то время как датчик 1.4-1 подключен к счетному входу счетчика 20. При выходе числа счетчика 20 за .пределы зоны нечувствительности, определяемой задатчиком 21, срабатьтает звено 22 совпадений и через элемент И 25, к второму входу которого присоединен
NfflHycoBbm выход счетчика 20, срабатывает триггер 27. При этом на его инверсном выходе Исчезает сигнал и соответственно исчезает сигнал на выходе 33 блока и на входе элемента И 2.9. Последний перестает пропус- катъ командный сигнал триггера 11 на вход 7 узла 2,2 управления, и исполнительньй орган 2.1 останавливается. Прекращение хода исполнительного органа 2.1 продолжается до тех пор, пока датчиком 1,4-1 не будет списано накопленное в счетчике 20 число
г и не сработает нуль-орган 23, который отключает триггер 27 После этого запрет хода исполнительного органа 2.1 сн -пчается и последний продолжает движение, синхронное с исполQ нительным органом 1.1.
Если в процессе перемещения исполнительный орган 2.1 отстает от. исполнительного органа 1.1, то счетчик 20 начинает накапливать число
5 со знаком плюс, и при выходе его за пределы зоны нечувствительности сра- батьшает через элемент И 24 триггер 26.. снимается сигнал с выхода 32 блока, накладывается запрет на про- хояэдение командного сигнала триггера 1 через элемент И 1.9 и исполнительный орган 1.1 останавливается , поджидая отстав пий исполнительный орган .
Точно так же функционируют блоки
5 1.12,..., (п-1).12 синхронизации при подаче команд на перемещение в началь.ное положение триггером 10. Только здесь накладываются запреты на прохождение командных сигналов через элементы И 1.8, 2.8,i.. п.8 к входам 6 узлов 1.2, 2.2,... п.2 управления.
Отключение триггера 1t нуль-органом 16 по окончании программных пе5 ремещений исполнительных органов 1 . 1, 2.1,..., П.1 происходит лишь при отсутствии запретов от всех блоков 1.12,..., (п-1).12 синхронизации на входах элемента И 17, т.е. при
0 равных программных перемещениях всех исполнительных органов 1.1, 2.1,..., п,1.
При установке всех исполнительных органов 1.1, 2.1,..., П.1 в началь5 ное положение производится гашение счетчиков 20 всех блоков 1.12,..., (п-1).12 синхронизации (фиг.1) и счетчиков 62 блоков 47 устранения
0
0
перекосов (фиг 2) узлов 1.2., 2,2,-, ,..j 11.2 по сигналу с выхода элемента И 19 ,для-исвдшчения накоггаения счетчиками 20 и 62 возможных сигналов помех. .
Если при отключенньп;; гидроци- линдрак 3-15 3-2 (фиг,2) исполни тельный орган 1 самопроизвольно опускается под действием собствемкого .веса из-за непдотностей в гщтроци- линдрах 3-15 3-2 или золотникак 38-1 38-2 J реверсивкь Й счетчик 56 блока 45 компенсации самохода с тФшрует импульсы датчика 4-1 пе.рекещетгя подаваемые на счеп-гый вход через элемент И 70 блока 46 реверса, Ког- да число в счетчике 56 сравняется с числом в задатчике 60 зоны нечзгвст витальности3 срабатывает звено 57 сравнения и триггер 58, При так как имеется сигнал и на втором вкоде элемента И 54j появляется скг- нал на его прямом вьосоде. по кото- рощ; через элементы И 55-1 и 55-2 элементы ИЛИ 52-1 к 52-2,. элементы И 50-1 и 50-2 логнческй::х блоков 43--I и 43-2 срабатывают ус лители 41-1 :я 41--2 и электромагниты 40--1 и 40™2о Гидроцйлиндракн и 3-2 исполш- - тельный орган 1 воззращается в заданное положение5 элемент И 71 (фиг.З) блока 46 реверса ггропускает импульсы датчика 4-1 на c4STHbrii вход счетчика 56 блока 45 и со держимое счетчика 56 списывается до нуля. При: этом срабатывает нуль-орган 61 и сбрасьшается триггер 58. Соответственно отключаются электромагниты и 40-2 и исп6Л1О1Тепь.ный орган 1 останавл:ивается л заданном положении.
При программном перемещении исполнительного органа 1 сигнагш датчика 4-1 не проходят на счетный вход счетчика 565 так как отсутствует сигнал на инверсном выходе инвертора 49 и на входах элементов И 70 и 71 блока 46 реверса,, Если по входу б выдается сигнал возврата ксполгштель него органа 1 в г ачальиое положениеg то через элемента ИЛИ 52-1 и ., И 50-1 и 50-2 срабатывшот усилители 41-1 и 41-2 и гидроцилк1адрами 3-1 и 3-2 исполнительный орган 1 яодни- мается в верхнее начальное положение гфи программном опускании, либо через элементы 51-2 и 51-2 срабатывают усилители 42-1 и 42-2 и яспол™
0
5
0
5
5
нктелькый орган 1 опускается в нижнее начальное положение при программном подъеме, При срабатьгоании датчиков 1.5-1 и 1,5-2 начального положения () отключается через элемент И 19 триггер 10 и исполнительные органы 1.1, 2,1п,1
останавливаются в заданном начальном положении. При движении исполнительных органов 1,1J 2.1,...J п,1 в начальное положение (сигнал на входе 6) происходит (фиг.2) гашение счетчика 62 блока 47, После прихода исполнительных органов 1,1, 2,1,..., П.1 в заданное начальное положение блок 47 начинает контролировать самопроизвольные опускания исполнительных органов 1,1, 2.1а,„., п,1 сначала,
Если в процессе программных перемещений либо перемещений в начальное положение скорости штоков гидро- цилищфов 3-1 и 3-2 (фиг.2) неоди- наковы5 происходит перекос исполнительного органа 1 и может произойти его заю1инива.ние, Реверсивный счетчик 62 блока 47 устранения перекоса контролирует разность перемещений штоков гидроцилиндров 3-1 и 3-2 благодаря подключению к его счетным входам и датчиков 4-1 и 4-2 перемещения исполнительного органа 1, При Нсшичии разности перемещений гидроцилиндров 3-1 н 3-2 на выходе счетчика 62 появляется число одного И.ПИ другого знака в зависимости от знака разности перемещения гидро- цилиндров 3-1 и 3-2, Если, например, ГИДРО1ЩЛИНДР 3-1 опережает гидро- дилиндр 3-2,- то знак числа в счетчике 62 +, и наоборот. При достижении числом в счетчике 62 порога нечувствительности, задаваемого задат- чиком 64, срабатьгоает звено 63 сравнения и через элемент И 66 либо 67, в зависимости от знака числа +
или 69,
срабатьшает триггеф 68 или
Если срабатьшает триггер 68, то на его инверсном выходе исчезает . сигнши и соответственно исчезает сигнал; на входах элементов И 50-1 и 51-1, через которые передается сигнал включения электромагнитов 39-1 и 40-1 гидроцилиндра. При этом гидрог илиндр 3-1 останавливается, а гидроцилиндр 3-2 продолжает движе- ние, и число, накопленное в счет
чике 62, списьгоается до нуля. При нуле счетчика 62 срабатьшает нуль- орган 65 и отключает триггер 68, движение обоих гидроцилиндров восстанавливается. Точно так же при срабатывании триггера 69 останавливается гидроцилиндр 3-2, а гидроцилиндр 3-1 продолжает движение до полного списания числа в счетчике 62. После этого движение обоих гидроцилиндров 3-2 и 3-1 восстанавливается.
Если перекос возникает при самопроизвольных опусканиях исполнительного органа 1, т.е. при отсутствии командных сигналов на входах 6 и 7, то при срабатывании триггера 68 через элемент И 5А-1 передается сигнал включения подъема гидроцилиндра 3-1, опередившего гидроцилиндр 3-2 в про- цессе самопроизвольного опускания. Одновременно подается сигнал (фиг.4) к повторителю 73 блока 48 реверса, по которому сигналы датчика 4-1 переключаются со счетного входа + к счетному входу - счетчика 62 для списания накопленного в нем числа. Кроме того, запрещается передача включающего сигнала через элемент И 59 блока 45 для компенсации самопроизвольного опускания исполнительного органа 1 до полного списания накопившейся разности в счетчике 62 блока 47, чем исключается возможность заклинивания исполнит ельного органа 1.
При срабатьшании триггера 69 блока 47 в процессе самопроизвольных опусканий исполнительного органа 1 (т.е., при перекосах противоположного знака) через элемент И 54-2 логического блока 43-2 передается . сигнал включения подъема гидроцилиндра 3-2, опередившего гидроцилиндр 3-1. Одновременно подается сигнал к повторителю 74 блока 48 реверса, по которому сигналы датчика 4-2 переключаются со счетного входа - к счетному входу + счетчика 62 для списания накопленного в нем числа. Кроме того, запрещаетс передача включающего сигнала через элемент И 59 блока 45 для компенсации самопроизвольного опускания исполнительного органа 1 до полного списания накопившейся разности в счетчике 62 блока 47, чем, как и в предьщущем случае, исключается воз
5
5
0
0 5
0
5
0
5
можность заклинивания исполнительного органа 1.
При срабатывании триггера 68 для компенсации опережения гидро- цштиндра 3-1 и перекоса в процессе самопроизвольных опусканий исполнительного органа 1 сигнала датчика 4-1 переключаются блоком 46 реверса со счетного входа + на счетный вход - счетчика 56 блока 45 для уменьшения накопленного в нем числа при подъеме гидроцилиндра 3-1 в процессе компенсаци перекоса. Этим исключается погредпность при учете самопроизвольных опусканий исполнительного органа 1, контролируемых с помощью датчика 4-1 гидроцилиндра 3-1. Перекосы исполнительных органов 1.1, 2.1,..., П.1 компенсируются и при их перемещении в начальное положение , благодаря отключению триггера 10 (фиг о 1) при одновременном срабатывании датчиков 1.5-1, 1.5-2, 2.5-1, 2.5-2,.,., п..5-1, п.5-2 начального положения всех исполнительных органов 1.1, 2.1,..., п.1.
В режиме программных перемещений измеряемые счетчиками 56 и 62 (фиг.2) самопроизвольные опускания и перекосы исполнительных органов 1.1, 2.1, ..., П.1 во всех циклах складываются. Лишь при выходе отклонений за пределы допусков, регламентируемых задат- чиками 60 и 64 соответственио, узлы 1.2, 2.2,..., п.2 управления автоматически вьщают команды на возврат исполнительных органов 1.1, 2.1,..., П.1 в заданном положении или компенсацию их перекоса.
Формула изобретения
Устройство для программного уп . равления многодвигательным гидроприводом, содержащее п исполиительных органов, п узлов управления, п первых и п вторых гидроцилиндров, п первых и п вторых импульсных датчиков перемещения, п первых и п вторых датчиков начального положения, п первых и п вторых элементов И, первый и второй триггеры, первый и второй элементы И, счетчик, нуль-орган, блок управления и блок задания программы, отличающееся тем, что, с целью расширения функциональных возможностей, в него введены n-l блоков синхронизгщии, элемент
ИЛИ, группу п первых и П вторых элементов Hj причем первый и второй входы элемента ИЛИ подключены к выходам соответственно первого и второго триггеров, а выход к первым ьшравляющим входам всех блоков синхронизации, вторые управхшющие входы которых соединены с выходом первого датчика перемещения первого исполнительного органа, третьи управляю. щие входы соединены с выходами соот- ветствующнхр первых датч:иков перемещения остальньк исполнительных органов , а входы сброса соединены с выходом первого элемента И, первые управляющие выходы узлов синхронизации подключены к соответствующим входам первого и второго элементов И грзшпы первого исполнительного органа и к соответстсвующим входам второго элемента И, а вторые управ- лянщие выходы соединены с одними входами соответствующих первых и вторых элементов И группы остальных
исполнитехЕьных органов и с соответс- твукжрими входами второго элемента И, последний вход которого подключен к прямому выходу нуль-органа.) инвер- сный выход которого соединен с первым входом второго триггера и входом выборки кристалла счетчика, а вход - с выходом, счетчика 5 синхро- I - .5-. l,s-}
0
вход которого подключен к первому выходу блока управления, информационный вход к выходу блока задания программы; а инкрементньй вход- к выходу первого датчика перемещения первого исполнительного органа, вторые входы первых элементов И группы соединены с выходом первого триггера, а вторые входы вторых элементов И группы - с выходом второго триггера, выходы первы с и вторых элементов И группы соединены соответственно с первьми и вторыми управляющими входами соответствующих узлов управленияS первые, вторые и третьи установочные входы которых соединены соответственно с выходами вторых датчиков перемещения, с выходом первого элемента И, с выходами первых датчиков перемещения, а выхо,цы соединены с соответствующими первыми и вторыми гидроцилиндрами, выход второго элемен- 5 та И соединен с R-входом второго триггера5 S-вход которого соединен с инверсным выходом нуль-органа, S-вход первого триггера соединен с вторым выходом блока управления, R-вход - с выходом первого элемента И, входы которого соединены с выходами- первых и вторых датчиков начального положения. 1.5-1 ft.S-l
0
0
«.
.5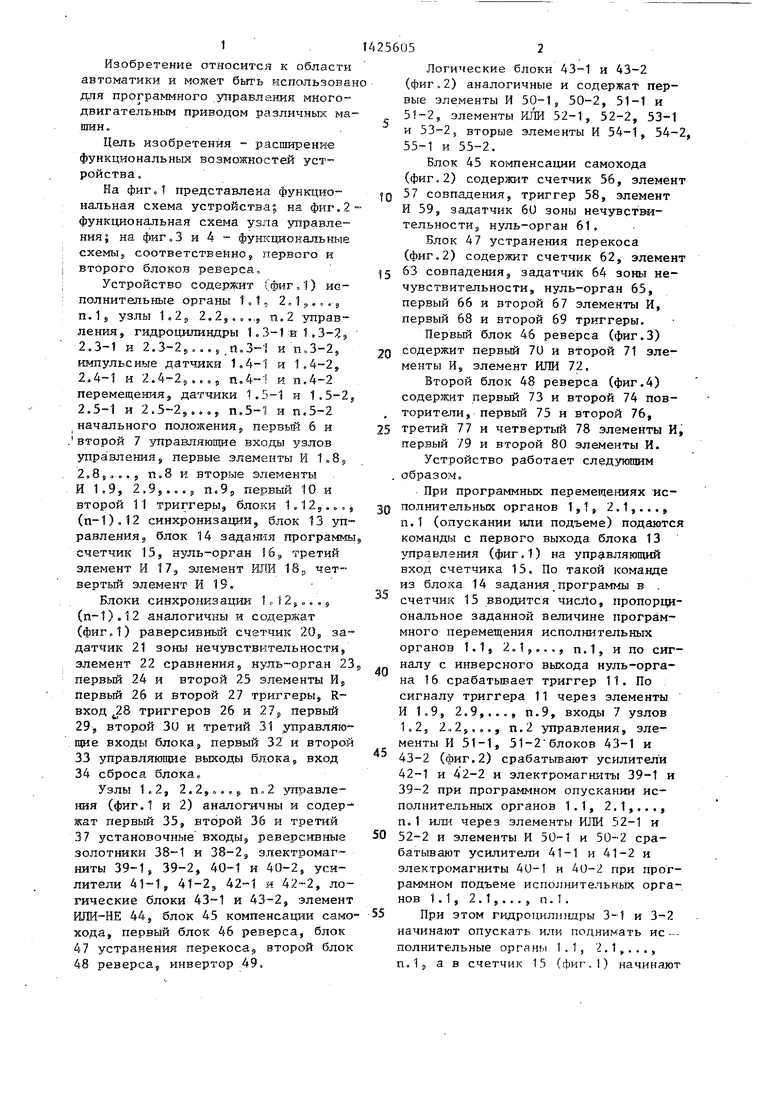

| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство управления гидротехническим затвором | 1980 |
|
SU947831A1 |
| Система управления непрерывным полосовым агрегатом | 1984 |
|
SU1219195A1 |
| Устройство для управления загрузкой самоходной уборочной машины | 1987 |
|
SU1628911A1 |
| Устройство для программного управления | 1976 |
|
SU616611A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Устройство для программного управления станком | 1979 |
|
SU930261A1 |
| ЧАСТОТНО-ИМПУЛЬСНОЕ УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ ДОЗИРОВОЧНОГО АГРЕГАТА | 1970 |
|
SU276209A1 |
| Устройство для программного управления и контроля циклическими процессами | 1985 |
|
SU1310776A1 |
| Система абтоматического управления прореживателем растений | 1984 |
|
SU1159495A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
. Изобретение относится к области автоматики и может быть использовано для программного управления много- двигательным приводом различных, машин. Цель изобретения состоит в расширении функциональных возможностей устройства, что достигается за счет введения в известное устройство (п- 1) блоков синхронизации, 2п элементов И и элемента ИЛИ (п - число исполнительных органов), кЬторые обеспечивают синхронизацию хода всех исполнительных органов, компенсацию возможного самохода отдельных исполнительных органов и перекосы последних. 4 ил. С
1 / I У V
t:P
j f
,J
f n r - L25-J
tsi
Г4 с
LJ 11
Ш7
г
в g
1ГТ TL
ИГ
1
t lJ
L1
| Многоканальное устройство для централизованного управления исполнительными элементами | 1972 |
|
SU445025A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ ГАЛЬВАНИЧЕСКОЙ | 0 |
|
SU394755A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1976 |
|
SU616611A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР 1300416, ,27,05.86. | |||
