. ,
Изобретение относится к ciicTeviiiw авг6ма ического контроля к регулирования, а именно, к устройствам для измерения угловых перемещений вала.
Известно устройство-для измерения угловых перемещений вала, содержащее В1антовь1Й частотный датчик индукчйи магнитного поля, размещенный внутри двух магнитных систем. Одна из магнитных систем - подвижна и жестко соединена со, входным валом, а неподвижная и соединена с корпусом, являющимся одновременно магнитным экраном. Входной устройства соединён с входным валом редуктора, корпус которого соединен с неподвижной магнитной системой, а входной вал - с квантовым частотным датчиком ijНедостйток этого устройства состоит в недостаточно высокой точности измерения угла поворота вала из-за изменения направления вектора магнитного поля при повороте входного вала.
Наиболее близким по техническому рещению к даннбМу устройству является устройство для измерения угловых перемещений вала, содержащее частотный преобразователь индуйШи магнитного поля, закрепленный внутри основной магнитной системы жестко связанной с экраном, вспомогательные магнитные системы, рабиоложенные кондентричнр относительно основной магнитной системы и снабженные валами, источник опорного тока, лодалюченный к магнитньЫ 1диств-: мам . В этом устройстве за счет компенсации одной из составляющих вектора магнитного поля, создаваемого подвижной магнитной системой, направление магнитного потока в зоне расположения датчика при повороте входного вала остается неизменным.
Недостатки этого из1вестного устройсч
ва состоят в следующем. Во-первых, центры чувствительности квантового датчика и нуль-индикатора, выполненного, например, на однокомпонентном феррозонде,
не совпадают. Поэтому компенсация составляющей магнитного поля осуществляется с погрешностью, обусловленной неоц- нороцностью магнитного поля во внутреннем объеме магнитных систем. Во-вторы феррозондовый нуль-индикатор искажает поле Б зоне квантового датчика, так как содержит ферромагнитные элементы в .проводники с током. Ьсе это снижает точность устройства йля измерения угловых перемещений вала.
Цель изобретения состоит в повышении точности устройства для измерения угловых перемещений вала,
Это достигается тем, что в устройство для измерения угловых перемещений вала введен механизм разворота, выполненный в виде трех конических зубчатых колес, ООН о из которых связано с входным валом, а два других - с валами вспомогательных магнитных систем.
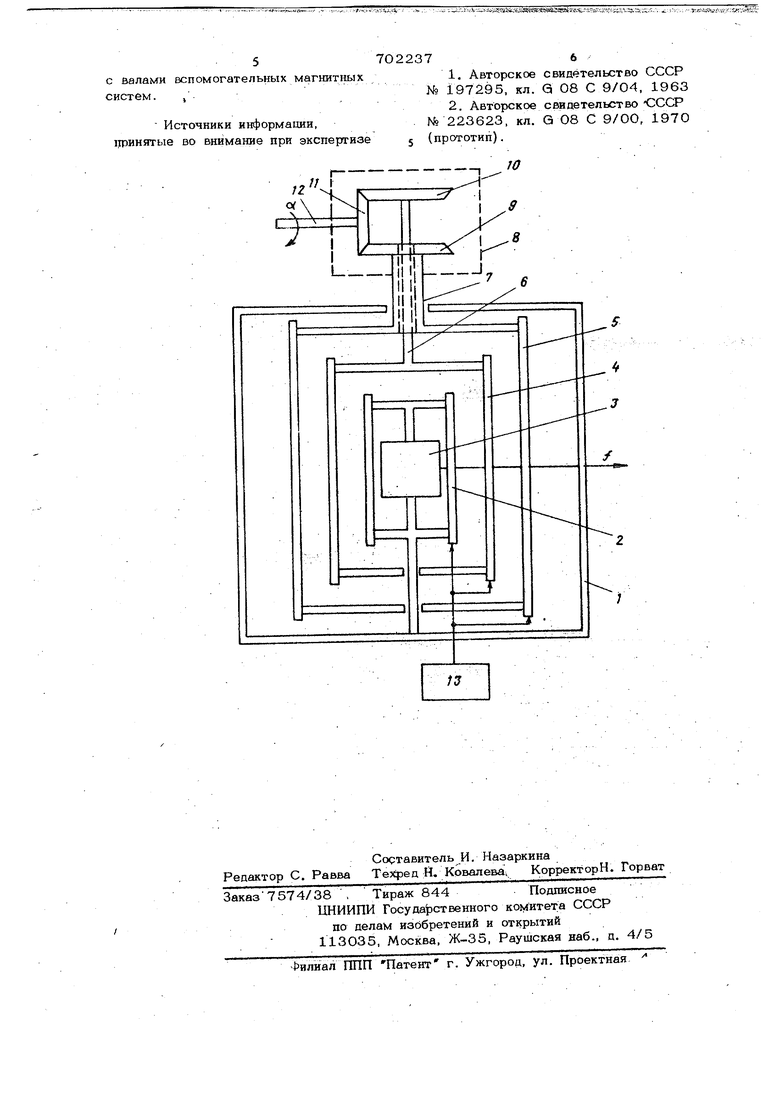
Блок-схема устройства для измерения угловых перемещений вала представлена на чертеже. Устройство содержит экран основную магнитную систему 2, частотный преобразователь 3 индук1ши магннтного поля, вспомогательные магнитные системы 4 и 5 с валами 6 и 7, механиз разворота 8, выполненный из трех конических зубчатых колес 9, 10 и 11, входной вал 12 и источйик 13 опорного тока
Магнитная система 2 и частотный преобразователь 3 инаукини магнитного поля |)а6п6ложены внутри магнитноУ-о экрана 1 и жестко связаны с ним и между собой. Неподвижная магнитная система 2 охвачена двумя подвижными магнитными системами 4 и 5, с помощью валов 6 к 7 соединены с механизмом разворота 8, выполненным в виде трёх конических зубчатых колес 9, 10, 11, причем зубчатые колеса .9 и 10 идентнчны и жестко соединены с валами 7 и 6 соответственно, зубчатое колесо 11 соединено со входным валом 12. Магнитные системы 2, 4, 5 представляют собой кольца Гельмгольца, подключенные к источнику 13 опорного тока, причём Магнитные системы 4 и 5 имеют одинаковые постоянные.
Устройство работает следующим образом.:
В исходном положении оси магнитных систем 2, 4 и 5 и направления создаваемых ими маг нитных полей совпадают. Магнитная система 2 создает индукцию магнитного поля В о, а каждая из сие-. тем 4 и 5 - индукцию Bg.Torna суммарная инаукция Вг в зоне расположения частотного преобразователя 3 равна
Bt--Bo 2B.
При повороте входного вала 12 на угол cL каждый из валов 6 и 7 поворачивается на угол () k-eC, , где К-коэффициент передачи механизма разворота 8, определяемый сротнощением размеров зубчатых колес 9, 1О и 11. Связаннь1е с валами 6 и 7 маг нитные системы 4 и 5 разворачиваются относительно оси магнитной системы 2на углы i Р , и индукция создаваемого ими магнитного поля окажется равной 2BCOSji. При этом ориентация магнитного потока в зоне частотного преобразователя 3 не изменяется. С учетом поля, создаваемого магнитной системой 2, суммарное значение индукции jit равно
В В 2Всо5К.Л.Таким образом, суммарная индукция является функцией угла поворота входного вала 12 и имеет стабильное направление в пространстве.
Предложенное устройство позволяет наиболее полно реализовать точностные характеристики прецизионных преобразователей индукции магнитного поля в частоту следования импульсов и обеспечить точность измерения порядка десятых долей процента- Дополнительным преимуществом предлагаемого устройства является возможность повышения угловой Чувствительности в К раз (при k -i )
Использование механизма разворота позволяет сохранить неизменным направление суммарного вектора магнитной индукции при повороте входного вала.
Формулаизобретения
Устройство для измерения угловых перемещений вала, содержащее частотный преобразователь индукции магнитного поля, закрепленный внутри основной магнитной системы, жестко связанной с эк)аном, вспомогательные магнитные системы, расположенные концентрично относительно основной магнитной системы, и снабженные валами, источник опорного тока, подключенный к магнитным системам, отличающееся тем, что, с целью повьшения точности устройства, в него введен механизм разворота, выполненный в виде трех конических зубчатых колес, одно из которых связано с входным валом, а два других с валами вспомогательных магнитных систем. ,
Источники информации, 11ринятые во внимание при экспертизе
702237
1.Авторское свидетельство СССР № 197295, кл. Q 08 С 9/04, 1963
2.Авторское свидетельство-СССР № 223623, кл. Q 08 С 9/00, 1970
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угловых перемещений | 1976 |
|
SU600386A1 |
| Устройство для измерения угловых перемещений | 1980 |
|
SU920364A1 |
| Устройство для создания магнитного поля | 1977 |
|
SU748252A1 |
| Преобразователь угловых перемещений в код | 1980 |
|
SU896656A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1967 |
|
SU223623A1 |
| Устройство для измерения магнитной индукции | 1980 |
|
SU892371A1 |
| МАГНИТОМЕТРИЧЕСКИЙ МОДУЛЬ ИЗМЕРИТЕЛЬНО-АНАЛИТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ТЕСТИРОВАНИЯ ОТКРЫТЫХ МАГНИТНЫХ СИСТЕМ | 2006 |
|
RU2328754C2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1970 |
|
SU271133A1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| ВСЕСОЬЭЗНАЯ яшш-;?кш-^ид- БИБлИО i LHA | 1973 |
|
SU371417A1 |
