(5) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ИНДУКЦИИ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения элементов геомагнитного поля | 1978 |
|
SU789939A1 |
| Устройство для получения заданных значений постоянного тока | 1986 |
|
SU1328801A1 |
| Квантовый компонентный магнито-METP | 1979 |
|
SU819778A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| Устройство для измерения угловых перемещений | 1980 |
|
SU920364A1 |
| ОДНОКОМПОНЕНТНЫЙ СЕНСОР ГЕОМАГНИТНЫХ ПОЛЕЙ | 2018 |
|
RU2679461C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа | 2015 |
|
RU2625687C2 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
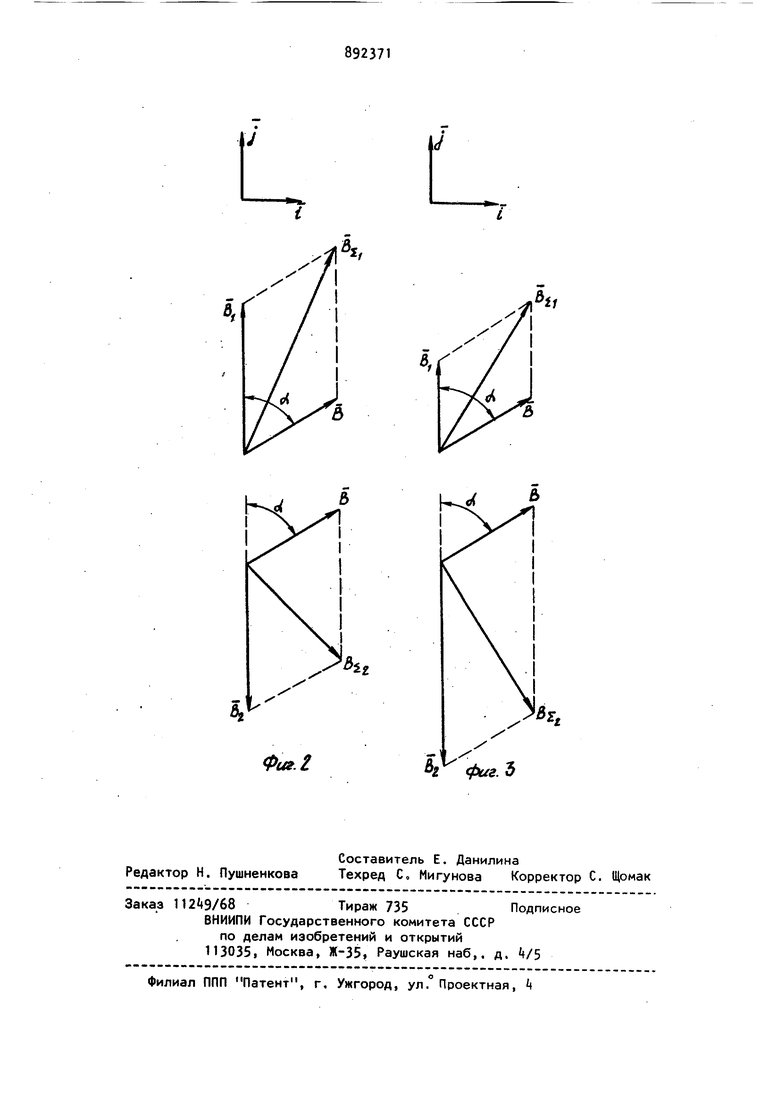
Изобретение относится к области магнитных измерений и предназначено для исследования пространственно-вре менного распределения магнитного пол земли автоматически как в полевых, так и в стационарных условиях. Известно устройство для определения элементов геомагнитного поля, со стоящее из магнитной системы, в кото рой размещен чувствительный элемент квантовый датчик, причем магнитную систему размещают так относительно магнитного поля земли, чтобы отсутствовал сигнал определенной гармоники низкой частоты, характеризующий суммарный модуль магнитного поля fl Однако, из-за наличия многокомпонентных контуров и следящих систем это устройство довольно сложно в техническом исполнении и неудобно для использования в автоматизированн системах. Наиболее близким техническим реше нием к предлагаемому изобретению является устройство для определения элементов геомагнитного поля, содержащее квантовый датчик, магнитную систему, стабилизируемую в пространстве маятниковым подвесом, источник тока, блок управления, вычислительный блок и блок разворота магнитной системы в вертикальной плоскости 2. Однако диапазон измерения элементов геомагнитного поля устройства ограничен характеристиками магнитометрического преобразователя, так, например, при использовании в устройстве квантового магнитометрического преобразователя с диапазоном 5000 - 50000 нТ, нижний предел измерения элементов геомагнитного поля устройства составляет 5000 нТ. . Цель изобретения - расширение диапазона измерения. Цель достигается тем, что устрой-ство для измерения магнитной индукции, содержащее магнитные системы, стабилизируемые в пространстве маятниковым подвесом, подключенные к выходам блока управления, источник опорного тока и блок разворота магнитных систем в вертикальной плоскости снабжено последовательно соединенными фильтром разностной частоты, реверсивным счетчиком, коммутатором и дешифратором, при этом выходы квантоЁых дат.микрв соединены со входами фильтра разностной частоты, второй вход реверсивного счет чика - с третьим выходом блока управления второй вход коммутатора связи с выходом источника опорного тока, второй и третий выходы коммутатора - с обмот ками магнитных систем квантовых датчиков . На фиг.1. представлена структурная схема устройства; на фиг. 2 и 3 - гра фики, поясняющие принцип его работы. Устройство (фиг. 1/содержит квантовые датчики 1 и 2, включенные по дифференциальной схеме, выход датчика 1соединен с первым входом фильтра 3 разностной частоть, а выход датчика 2с его вторым входом, магнитную систему k, жестко соединенную с квантовым датчиком 1, магнитную систему 5 жестко соединенную с квантовым датчиком 2 и магнитной системой k, стабилизируемые в пространстве маятниковым подвесом 6, источник 7 опорного тока, блок 8 разворота магнитных систем в вертикальной плоскости, блок 9 управления, первый выход которого соединен со входом источника 7 опорного тока, третий выход - со вводом, блока 8 разворота, счетчик 10, первый вход которого соединен с выходом фильтра 3 раз ностной частоты, второй - со вторым выходом блока 9 управления, дешифрато 11, коммутатор 12, первым выходом соединенный с магнитной системой k вторым - с магнитной системой 5, третьим - со входом дешифратора 11, кроме того, первый вход кЬммутатора 12 соединен с выходом источника 7 опор ноге тока, а вто{эой - с выходом счетчика 10. Устройство работает следующим обра зом. Маятниковый подвес стабилизирует магнитные системы и 5 в определенном положении в пространстве. По команде с блока 9 управления производится подача питания от источника 7 опорного .тока через коммутатор 12 на обмотки магнитных систем и 5 таким образом, что векторы магнитной индукции магнитных систем t и 5 В и Ва равны по моулю и противоположны по направлению (фиг. 2). Квантовые датчики, 1 и 2 , енерируют, при этом частота на выоде датчика 1 - f;, пропорциональна уммарной магнитной индукции Вд ; KBSx,, а частота на выходе датика 2 - ff пропорциональна суммарной агнитной индукции f « ,де В - вектор магнитной индукции, оставлякмцая которого определяется, - аналог величины гирома,шитного тношения атома. С выхода фильтра 3 азностной- частоты на вход счетчика 0 поступает разностный сигнал, пропорциональный разности В Вд„. Счетчик 10 производит подсчет числа импульсов за интервал времени, формируемый блоком 9 управления. Число импульсов пропорционально разности Вд - Вял. По сигналу с выхода счетчика 10 коммутатор 12 производит переключение цепей питания обмоток магнитных систем и 5 таким образом, что уменьшается магнитная индукция одной магнитной системы при одновременном увеличении на такую же величину магнитной индукции второй магнитной системы. Для случая, рассмотренного на фиг. 2 производится уменьшение В и увеличение В. Процесс измерения разности частот f - f и переключения цепей питания обмоток магнитных систем i и 5 продолжается до тех пор, пока не выполняется с заданной точностью соотношение f-}- fi, что соответствует (фиг. З) B); Bjj. При выполнении с заданной точностью соотношения f-j - f дискретно го выхода коммутатора 12 поступает сигнал на дешифратор П, пропорциот нальный модулю проекции вектора ма1- нитной индукции В на ось j. Поскольку (фиг. 2 и 3) справедливы соотношения BC. cosA+ В cosset Ъ + 28.,6 cosct, в|, в| - 2BQ,B cosi++ В I;- 2Bj. В cosct. при Ва В справедливо равенство - В - 2BB5 cosoL. В, + coscL Откуда модуль проекции вектора магнитной индукции на ось j . ., , 84 - Вч В . cosol, --- . Таким образом, нижний диапазон измерения магнитной индукции ограничем практически /1ишь точностью преобразователя.
После этого блок 9 управления выдает сигнал на блок 8 разворота для перевода магнитных систем j и 5 дзтмиков 1 и 2 в другое положение, т.е. отклонения их на известный угол, заданный,, например, радиальными упорами на маятниковом подвесе 6, к поверхности которых и прижимаются магнитные системы t и 5. Сам же разворот может производиться, например, исполнительными элементами, применяемыми в автоматике или вручную..Вышеуказанная операция измерения элемента геомагнитного поля повторяется. С выхода дешифратора информация поступает на регистрацию.
Изобретение позволяет определить элементы геомагнитного поля, минймаль- 0 ная величина которых ограничена лишь погрешностью устройства и составит 5-20 нТ, тогда как минимальная величина определяемых элементов геомагнитного поля известного устройства, ограничена диапазоном работы квантового датчика. Так, например, при использовании в устройстве квантового датчика с диапазоном 5000 - 50000 нТ, нижний предел измерения элементов геомагнитного поля составляет 5000 нТ.
Формула изобретения
Устройство для.измерения магнитной индукции.,, содержащее магнитные системы, стабилизируемые в пространстве маятниковым подвесом, подключенные к выходам блока управления, источник опорного тока и блок разворота магнитных систем в вертикальной плоскости, отличающееся тем, что, с целью расширения диапазона измерения, оно снабжено последовательно соединенными фильтром разностной частоты, реверсивным счетчиком, коммутатором и дешифратором, при этом выхсэды квантовых датчиков соединены со входами фильтра разностной частоты, второй вход реверсивного с третьим выходом блока управления. fJLf второй вход коммутатора связан с выхоДОМ й гточника опорного тока, а второй и выходы коммутатора - с обмотка %4Г нитных систем квантовых датчиков. Источники информации, принятые во внимание П{ж экспертизе 1.Авторское свидетельство СССР № 620921, кл. G 01 R33/00, 1578. 2.Авторское свидетельство СССР № UOig. кл. G О R 33/00, I960.
Фиг.1
