Изобретение относится к строительно-дорожному машиностроению, в частности к устройствам автоматического управления рабочим органом землерой- с но-транспортных машин.
Цель изобретения - повышение точности управления рабочим органом при копании.
На фиг.1 изображена блок-схема Q устройства для автоматического уп- равления рабочим органом землеройнотранспортной машины; на фиг.2 - функ- циональная схема блока обнаружения отклонения параметров; на фиг.З - tS функ1 1ональная схема логического блокад на фиг.4 - функциональная схема блока формирования, управляющих сигналов.
Устройство содержит измерительные 20 блоки силы тяги 1, действительной скорости движения 2, задатчик 3 чувствительности, представляющий собой переменный потенциометр, с движка которого снимается аналоговый сигнал 25 (постоянное напряжение), измерительный блок 4 положения рабочего органа, который вырабатывает аналоговый сигнал, пропорциональный положению рабочего органа относительно грани- Q тационной вертикали в продольной плоскости.
Блок 1 вьфабатывает на своем вы- ходе аналоговый сигнал, пропорциональный сипе тяги, а блок 2 - аналоговый сигнал, пропорциональный действительной скорости движения машины. Выходы блоков 1 и 2 связаны соответственно с входами блока 5 поиска максимума тяговой мощности. Выходы,за- , датчика 3 чувствительности и блока 2 связаны соответственно с первым и вторым входами умножителя 6, который реализует в аналоговой форме операцию умножения и вырабатывает на своем выходе аналоговый сигнал, пропорциональный произведению сигналов с блоков 2 и 3.
Выходы блока 5, на которых вырабатываются команды поиска максимума тяговой мощности, связаны с первым и вторым входами логического блока 7. Первый и второй выходы логического блока 7 связаны с третьим и четвертым входами блока 8 формирования управляющих сигналов, второй вход которого связан с выходом измерительного блока 4 положения рабочего органа , а первый - с выходом умножителя 6,
35
40
45
50
S
0 5 Q
5
0
5
0
Первый и второй выходы блока 8 связаны с исполнительным механизмом 9, который служит для преобразования электрических команд в механические перемещения рабочего органа. Третий и четвертый выходы блока 8 связаны с третьим и четвертым входами блока
10обнаружения отклонений параметров, первый вход которого связан с ш-х.о- дом умножителя 6, второй - с третьим выходом блока 7, а выходы - с третьим и четвертым входами того же блока.
Блок 10 обнаружения отклонения параметров состоит из первого фильтра
11низких частот (ФНЧ), элемента 12 памяти, второго ФНЧ 13, первого 14 и второго 15 нуль-органов, первого 16
и второго 17 элементов И. Первые входы нуль-органов 14 и 15 объединены и соединены с выходом элемента 12 памяти, их вторые входы соединены с выходами первого 11 и второго 13 ФНЧ. Первый выход нуль-органа 14 соединен с первым входом элемента И 16, а его второй выход - с вторым входом элемента И 17. Второй выход нуль-органа 15 соединен с первым входом элемента И 17, а его первый выход - с вторым входом элемента И 16, Выходы элементов 16 и 17 являются выходами блока 10 обнаружения, пер-вым и четвертым входами которого соответственно являются входы ФНЧ 11 и 13. Вторым входом блока 10 является первый (управляющий) вход элемента 12 памяти, второй (информационный) вход которого является третьим входом блока 10.
Фильтры 11 и 13 производят усреднение текущих значений сигналов действительной скорости U(t) и положения рабочего органа Ugt. При этом фильтр 11 является динамическим (т.е. его полоса пропускания зависит от уровня входного сигнала), что позволяет учесть изменение спектра входного сигнала ), что, в свою очередь, приводит к повышению точности оценки его усредненного значения И, следовательно, к повьшгению точности регулирования. Элемент 12 памяти при управляющем сигнале Z О, поступающем на его первый вход, находится в режиме записи сигнала Uy(f). При 2 -1 элемент 12 хранит эталонное значение сигнала Uy(t 0) (момент t О соответствует началу стабилизации параметров, т.е. моменту переключения из состояния О в состояние Z 1). Нуль-органы 14 и 15 сравнивают сигналы U,y(t) и Ug(t) с эталонным значением сигнала Uy (t 0) и вырабатывают релейные команды, подаваемые на элементы И 16 и 17, которые осуществляют операцию логического умножения и вырабатывают релейные сигналы, являющиеся выходными сигна- лами блока 10 обнаружения.
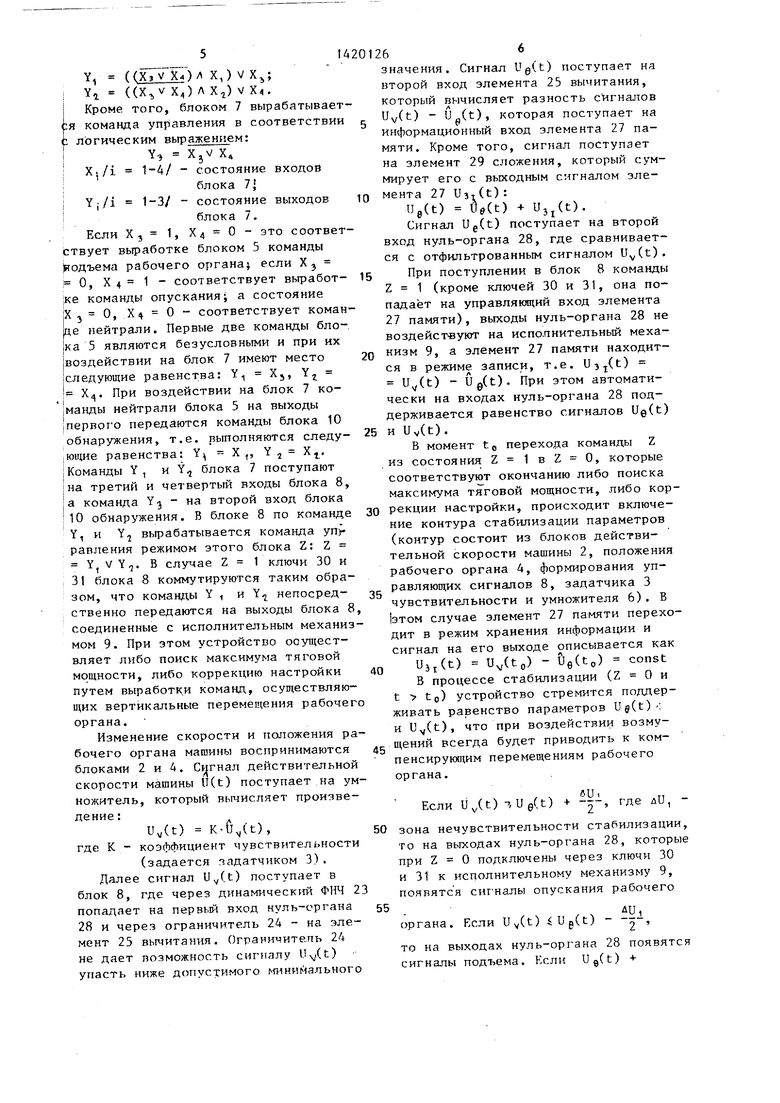
Логический блок 7 состоит из элемента ИЛИ-НЕ 18, первого 19 и второго 20 элементов И, первого 21 и второго 22 элементов ИЛИ. Первые входы эле- ментов ИЛИ 19 и 20 являются соответственно третьим и четвертым входами блока 7, а объединенные вторые входы элементов И 19 и 20 соединены с выходом элемента ИЛИ-НЕ 18, который является третьим выходом блока 7.. Первый и второй входы элемента 18, объединенные соответственно с первым и вторым входами первого 21 и второго 22 элементов ИЛИ, являются соответ- ственно первым и вторым входами блока 7. Первым и вторым выходами блока 7 являются соответственно выходы первого 21 и второго 22 элементов ИЛИ, второй и первый входы которых соответственно соединены с выходами первого 19 и второго 20 элементов И.
Логический блок 7 устанавливает приоритет команд поиска максимума тяговой моршости, поступающих с блока 5, над командами коррекции настройки, поступающими с блока 10, и выдает управляющую команду на элемент 12 памяти блоца 10 обнаружения.
Блок 8 формирования управляюпщх сигналов состоит из динамического ФНЧ 23, ограничителя 24 скорости, элементов 25 вычитания, ИЛИ 26, памяти 27, нуль-органа 28, элемента 29
сложения, первого 30 и второго 31
ключей. Выход ФИЧ 23 соединен с первым входом нуль-органа 28. Выход ограничителя 24 является третьим выходом блока 8 и соединен с первым входом элемента 25 вычитания. Выход эле мента 25 соединен с первым (информационным) входом элемента 27 памяти, выход которого, в свою очередь, соединен с первым входом элемента 29 сложения. Выход элемента 29 яв пяется четвертым выходом блока 8 и соединен с вторым входом нуль-органа 28, первый и второй выходы которого соответ ственно соепинрны с первыми входами
g 0 5 0
g
0
первого 30 и второго 3t ключей. Выход элемента ИЛИ 26 соелинен с вто- рьгми входами ключей 30, 31 и вторым (управляющим) входом элемента 27 памяти. Первым и вторым выходами блока 8 соответственно являются выходы первого 30 и второ.го 31 ключей, третьи входы которых соответственно являются третьим и четвертым входами блока 8 и объединены с входами элемента ИЛИ 26. Вторым входом блока 8 являются объединенные вторые входы элементов вычитания 25 и сложения 29, а первым входом этого блока являются объединенные входы OfN 23 и ограничителя 24.
В блоке 8 формирования управляющих сигналов осуществляется адаптмв- ное подавление высокочастотных сос- тавляюгшх и ограничение по минимуму сигнала действительной скорости ма- шины Uy(t), автоматическая самонастройка в состояние нейтрали Uv(t) Ug(t), сравнение входных параметров и вычисление текущего рассогласования UCt) Ug(t) - U(t), а также переключение режимов работы устройства.
Устройство работает следующим образом.
При включении устройства и переходе на автоматическое управление с измерительных блоков силы тяги Ej. 1 и действительной скорости движения машины V,j аналоговые сигналы, пропорциональные этим параметрам, поступают в блок 5 поиска максимума тяговой мощности, В блоке 5 происходит их перемножение (т.е. вычисление тяговой мощности W) W V-PT и вычисление знаков производных силы тяги Рg
.(
тяговой мощности W. Далее в блоке 5 знаки этих производных сравниваются. Если знаки совпадают, то выходные
д команды блока 5, имеюоше вид релейных сигналов, соответствуют заглублению рабочего органа, в противном случае эти команды соответствуют выглубле- нию. Если производная тяговой мощности близка к нулю W| W, то блоком 5 вьфабатывается команда нейтрали.
Далее команды блока 5 поступают в логический блок 7 на первый и второй входы, обеспечивается приоритет
с команд блока 5 над командами блока 10 обнаружения отклонений параметров, поступающих на третий и четвертый ВХОДЫ блока 7, в соответствии со следующими логическими выражениями:
Y, ((ХэУ ХОл X,) i Уг ((X,,v XO л X) V X4. I Кроме того, блоком 7 вырабатывает я команда управления в соответствии t логическим вьфажением; I Y, XjV Х I X./i 1-4/ - состояние входов :блока 7}
; Yj/i 1-3/ - состояние выходов блока 7.
Если X.j 1, Х4 0 - это соответствует выработке блоком 5 команды Подъема рабочего органа; если Xj i О, X 4 1 - соответствует выработ- ;ке команды опускания j а состояние |X.,X4 0- соответствует коман це нейтрали. Первые две команды бло1ка 5 являются безусловными и при их |воздействии на блок 7 имеют место |следующие равенства: Y Xj, Y 1 Х. При воздействии на блок 7 ко- |манды нейтрали блока 5 на выходы Первого передаются команды блока 10 обнаружения, т.е. выполняются следу- ;Ю1цие равенства: Y и i i- I Команды Y, и Y, блока 7 поступают I на третий и четвертый входы блока 8, |а команда Y - на второй вход блока i10 обнаружения. В блоке 8 по команде Y, и Y вырабатывается команда равления режимом этого блока Z: Z Y, VY,. В случае Z 1 ключи 30 и : 31 блока 8 коммутируются таким образом, что комащгы Y и Y, непосред-
ственно передаются на выходы блока 8, соединенные с исполнительным механизмом 9. При этом устройство осуществляет либо поиск максимума тяговой мощности, либо коррекцию настройки путем выработки команд, осуществляющих вертикальные перемещения рабочего органа.
Изменение скорости и положения рабочего органа машины воспринимаются блоками 2 и 4. Сигнал действительной скорости машины ll(t) поступает на умножитель, который вычисляет произведение :
U(t) K-ij(t),
где К - коэффициент чувствительности (задается задатчиком 3).
Далее сигнал U(t) поступает в блок 8, где через динамический ФНЧ 23 попадает на первый вход куль-органа 28 и через ограничитель 24 - на элемент 25 вычитания. Ограничитель 24 не дает возможность сигналу ) упасть ниже допустимого №1нийального
-
14201266
значения. Сигнал UgCt) поступает на второй вход элемента 25 вычитания, который вычисляет разность ctirHajioB
IJyCt) - Up(t), которая поступает на информационный вход элемента 27 памяти. Кроме того, сигнал поступает на элемент 29 сложения, который суммирует его с выходным сигналом элемента 27 изт(1):
Up(t) 00(t)
U3,(t).
Сигнал Ug(t) поступает на второй вход нуль-органа 28, где сравнивается с отфильтрованным сигналом U(t).
При поступлении в блок 8 команды Z 1 (кроме ключей 30 и 31, она попадает на управляющий вход элемента 27 памяти), выходы нуль-органа 28 не воздействуют на исполнительный механизм 9, а элемент 27 памяти находится в режиме- записи, т.е. ) U(t) - Ug(t), При этом автоматически на входах нуль-органа 28 поддерживается равенство сигналов Ue(t) и Uv(t).
В момент to перехода команды Z из состояния Z 1 в Z О, которые соответствуют окончанию либо поиска максимума тяговой мощности, либо коррекции настройки, происходит включение контура стабилизации параметров (контур состоит из блоков действительной скорости машины 2, положения рабочего органа 4, формирования управляющих сигналов 8, задатчика 3 чувствительности и умножителя 6). В |этом случае элемент 27 памяти переходит в режим хранения информации и сигнал на его выходе описывается как
U3,(t) U(to) - Ue(to) const
В процессе стабилизации (Z О и t to) устройство поддерживать равенство параметров Ug(t) : и Uy(t), что при воздействии возмущений всегда будет приводить к ком- пенсируюищм перемещениям рабочего органа.
«иЕсли Uv(t) UgCt) + -2-, где
dU, зона нечувствительности стабилизации, то на выходах нуль-органа 28, которые при Z О подключены через ключи 30 и 31 к исполнительному механизму 9, появятся сиг налы опускания рабочего
органа. Если Uy(t) iUg(t) -
то на выходах нуль-органа 28 появятся сигналы подъема. Если Ug(t) - ):jUp(t) - 2 ч О сигналы
отсутствуют.
Процесс стабштиэации параметров контролируется блоком обнаружения отклонений 10, в который поступают ctrr- налы скорости ) и положения Ug(t). При этом сигнал Uy(t) поступает как с умножителя 6, так и с ограничителя 2Д блока 8. Сигнал с умножителя 6 используется .непосредственно для контроля, а сигнал с ограничителя 24 - для записи эталонного значения сигнала Uv(tg). Запись и хранение эта- лонного значения сигнала скорости U(t(j), значения, соответствующего максимуму тяговой мощности, происходит в элементе 12 памяти блока 10 обнаружения по команде Y, поступающей на управляющий вход элемента 12. Если Yj О (для элемента 12 памяти это состояние является активным), то элемент 12 памяти находится в режиме записи, т.е. из2(й) Uv(t) (из2 - сигнал на выходе элемента 12), а устройство осуществляет поиск максимума тяговой мощности. Если УЗ 1, то элемент 12 памяти находится в режиме хранения (t) UyCtjj) const, а устройство осуществляет стабилизацию. В блок 10 поступает также сигнал Ug(t) с элемента 29 сложения блока 8, которьпЧ тоже используется для контроля. Контролируемые сигналы Uy(t) и UgCt) соответственно фильтруются ФНЧ 11 и 13, которые имеют более низ- йую частоту среза, чем ФНЧ 23, так как дрейф параметров происходит очень медленно. Отфт-шьтрованные с игналы поступают на нуль-органы 14 и 15, где сравниваются с эталоном Uy(tg), результат сравнения преобразуется логическими элементами И 16 и 17.
Если (U(t) ) - -|-)Л .
A(Ug(t) . - -j), где 4U, зона нечувствительности коррекции, что соответствует недостаточному вы- глублению рабочего органа, то на выходах блока 10 обнаружения появляются релейные команды коррекции настройки контура стабилизации выглублением рабочего органа. ..
Если (t.(l:) -/ U(t ) + -Г-) л
uUi ACUgCt) 1, l,(t:j) + --) , что соот
g ю 15202530540 .
§0 §5
0126
ветствует .недостаточному заглублению рабочего органа, то на выходах блока 10 обнаружения появятся команды коррекции заглублением.
4U2
Если (U(tJ + -2- Uv(t)Uv(t,) )Л (U,(t,) + 7.Ue(t)7, ,)), TO выход блока 10 обнаружения
остается нейтральным.
Устройство увеличивает производительность машины за счет увеличения времени ее нахождения в режиме максимума тяговой мощности.
Формула изобретения
1. Устройство для автоматического управления рабочим органом земперой- но-транспортной машины, содержащее блок силы тяги, блок действительной скорос ти движения, соединенный с первым входом умножителя, блок положения рабочего органа, подключенный к второму входу блока формирования управляющих сигналов, первый и второй выходы которого соединены с исполнительным механизмом, отличающееся тем, что, с целью повышения точности управления рабочим органом при копании, оно дополнительно снабжено задатчиком чувствительности, логическим блоком, блоком поиска максимума тяговой мощности и блоком обнаружения отклонения; параметров, причем блоки силы тяги и действительной скорости движения соединены с двумя входами блока поиска максимума тяговой мощности, оба выхода которого подключены к первым двум входам логического блока, задатчик чувствительности подключен к второму входу умножителя, выходкоторого соединен с первым входом блока формирования уп- равлякж их сигналов и с первым входом блока обнаружения отклонения параметров, первые два выхода логического блока соединены с третьим и четвертым входами блока формирования управляющих сигналов, третий выход ло- гическог о блока соединен с вторым входом блока обнаружения отклонения параметров, тpeтF й и четвертый выходы блока формирования управляющих сигналов соединены с третьим и четвертым входами блока обнаружения отклонения параметров, оба выхода которого соединены соответственно с третьим и четвертым входами логического блока.
2, Устройство по П.1, о т л и ч а- ю щ е е с я тем, что логический блок содержит элемент ШШ-НЕ, два элемента И и два элемента ИЛИ, причем каж- дый элемент И соединен последовательно с соответствующим элементом ИЛИ, при этом первым входом логического блока являются первые входы элемента ИЛИ-НЕ и элемента ИЛИ, вторым входом логического блока являются вторые входы элементов ИЛИ-НЕ и ИЛИ, третьим и четвертым входами логического блока являются соответственно первые входы первого и второго элементов И, а выходы элементов ИЛИ являются первым и вторым выходами логического блока, третьим выходом которого является выход элемента ИЛИ-НЕ, подключенного также к вторым входам элемен- тов и.
3. Устройство по п.1, о т л и ч а- ю щ е е с я тем, что блок обнаружения отклонения параметров выполнен из двух фильтров низких частот, элемента памяти, двух нуль-органов и двух элементов И, причем выход элемента памяти соединен с объединенными первыми входами первого и второго нуль-органов, с вторыми входами которых соединены соответственно первый и второй фильтры низких частот, первые выходы обоих нуль-органов соеди нены соответственно с двумя входами первого элемента.И, а вторые входы обоих нуль-органов - с входами второго элемента И, при этом первым входом блока обнаружения отклонения параметров является вход первого фильтра низких частот, вторым и третьим входами - первый « второй входы элемента памяти, и четвертым входом - вход второго фильтра низких частот., а выходами блока обнаружения отклонения параметров являются выходы элементов И.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Устройство для измерения характеристики частотной избирательности радиоприемного устройства по побочным каналам приема | 1990 |
|
SU1753609A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА СЛЕЖЕНИЯ | 2004 |
|
RU2284552C2 |
| Устройство для автоматического сопровождения объекта слежения | 2018 |
|
RU2694888C1 |
| Устройство для измерения характеристики частотной избирательности радиоприемного устройства по побочным каналам приема | 1986 |
|
SU1381725A1 |
| Устройство для измерения параметров газовых потоков | 1987 |
|
SU1437694A1 |
| Цифровой измеритель экстремумов переменного напряжения | 1985 |
|
SU1290186A1 |
| Устройство для сжатия информации | 1988 |
|
SU1547010A1 |
| Устройство для управления процессом намотки | 1986 |
|
SU1390618A1 |
| Способ итерационного измерения рассогласования в двумерных следящих системах и устройство для его осуществления | 2019 |
|
RU2733262C1 |

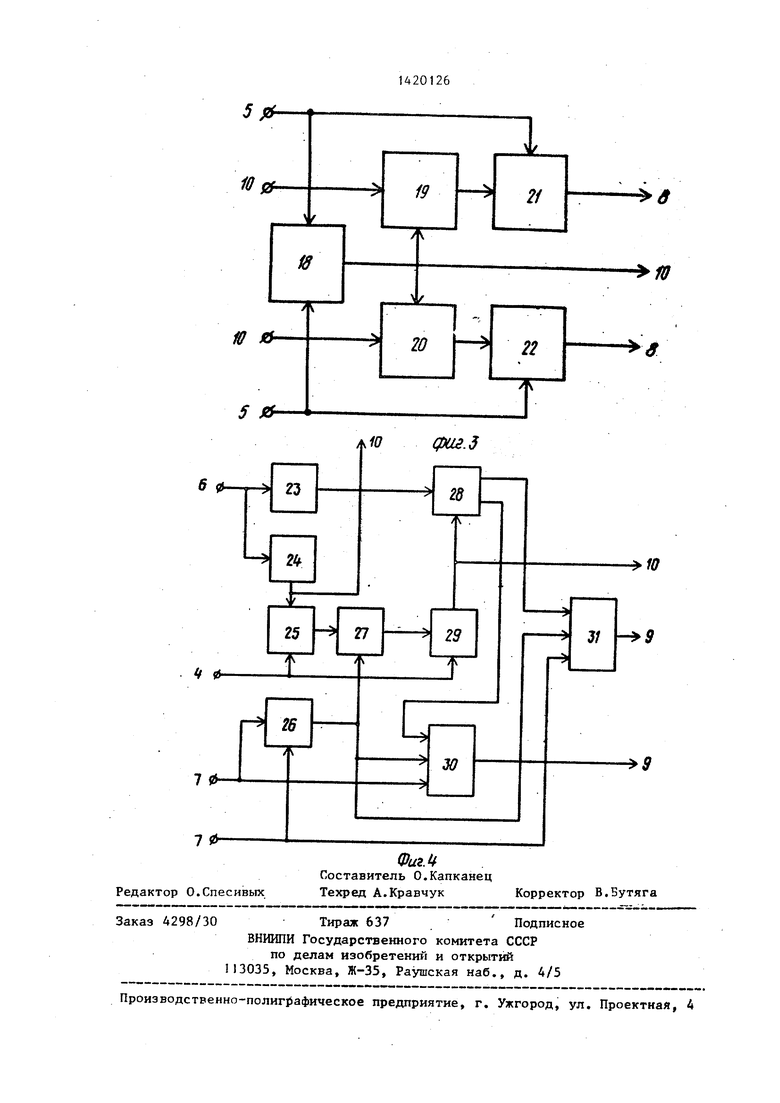
Изобретение относится к строительно-дорожному машиностроению и позволяет с высокой точностью управлять рабочим органом машины при копании. Для этого устр-во дополнительно содержит задатчик 3 чуБСтвительности, логический блок (ЛК) 7, блок 5 пенс- ка максим гма ткгозой мощности и блок 10 обнарзгжения отклонения параметров. К входам блока 5 подключены измерительные блоки силы тяги 1 и действительной скорости движения 2. Выход блока 5 через ЛБ 7 подключен к одному из входов блока 10, Выходы задатчи- ка 3 и измерительного блока 2 соединены с входами блока 6 умножения, выход которого подключен к входам блока 10 и блока 8 формирования управляющих сигналов. К другим входам блока В подкл;очены выход измерителыюго блока А положения рабочего органа к выходы ЛБ 7, Выходы блока 8 соеди не- иы с входаю-г блока 10 и с исполнительным механизмом 9, ЛБ 7 устанавливает приоритет команд поиска максимума тяговой мощности, поступающих с блока 5, над комакдаьш коррекции настройки, nocTynaionxvix с блока 10, и . вьодает управляющз ю команду на элемент паг4яти блока 10. Последний контроли- рует процесс стабилизации параметров. 2 з,п, ф-лы, 4 1ш. «WTK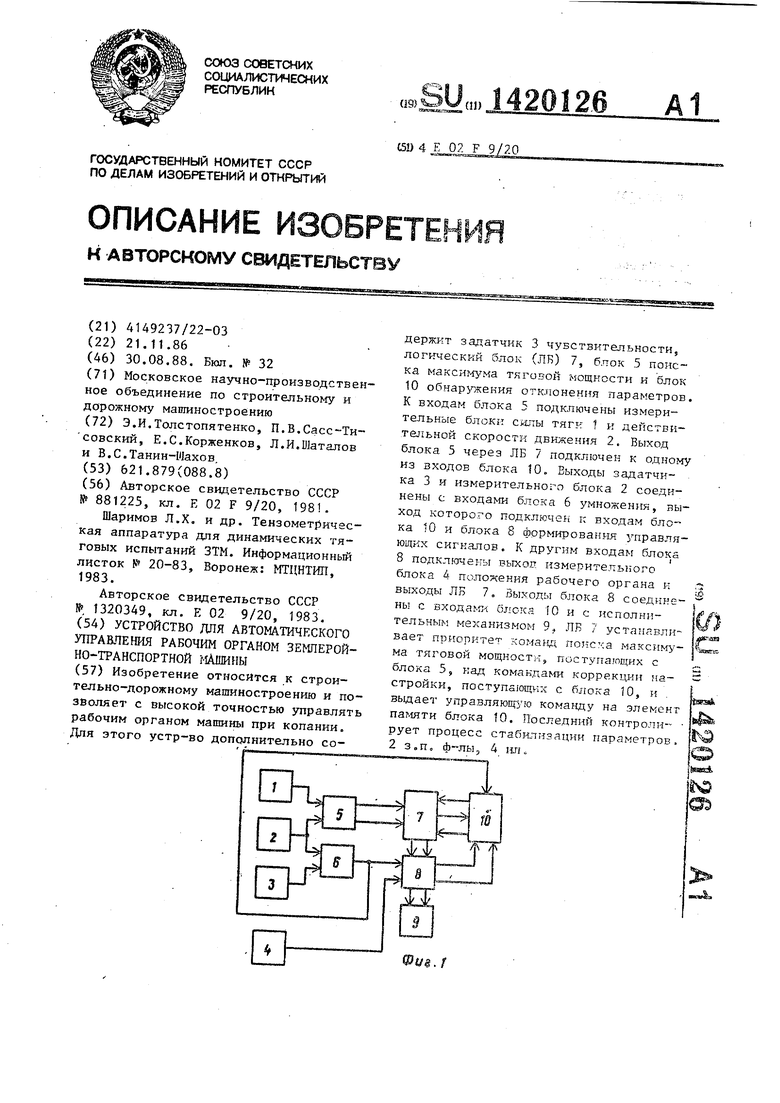
Фиг. 2
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и др | |||
| Тензометричес- кая аппаратура для динамических тяговых испытаний ЗТМ | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
