128
напряжением. Основной вход управления БУ соединен с автоматическим регулятором 10, а выход - с гидрорас- пределнтелем 5, управляющим исполнительным гидроцилиндром (ИГЦ) 1. Дополнительные входы БУ связаны с элементами сравнения (ЭС) 32 и 33. Первые входы ЭС 32 и 33 соединены соответственно с задатчиками 36 и 37 величин перемещения штока ИГЦ 1 и с задатчиком 35 поступательного перемещения машины. Вторые входы ЭС 32 и 33 соединены через интеграторы
1
Изобретение относится к землерой- но-транспортным машинам, а именно к бульдозерам, скреперам, авто грей дерам.
Цель изобретения - повышение про- изводительности землеройно-транспорт- ной машины путем исключения перерегулирования.
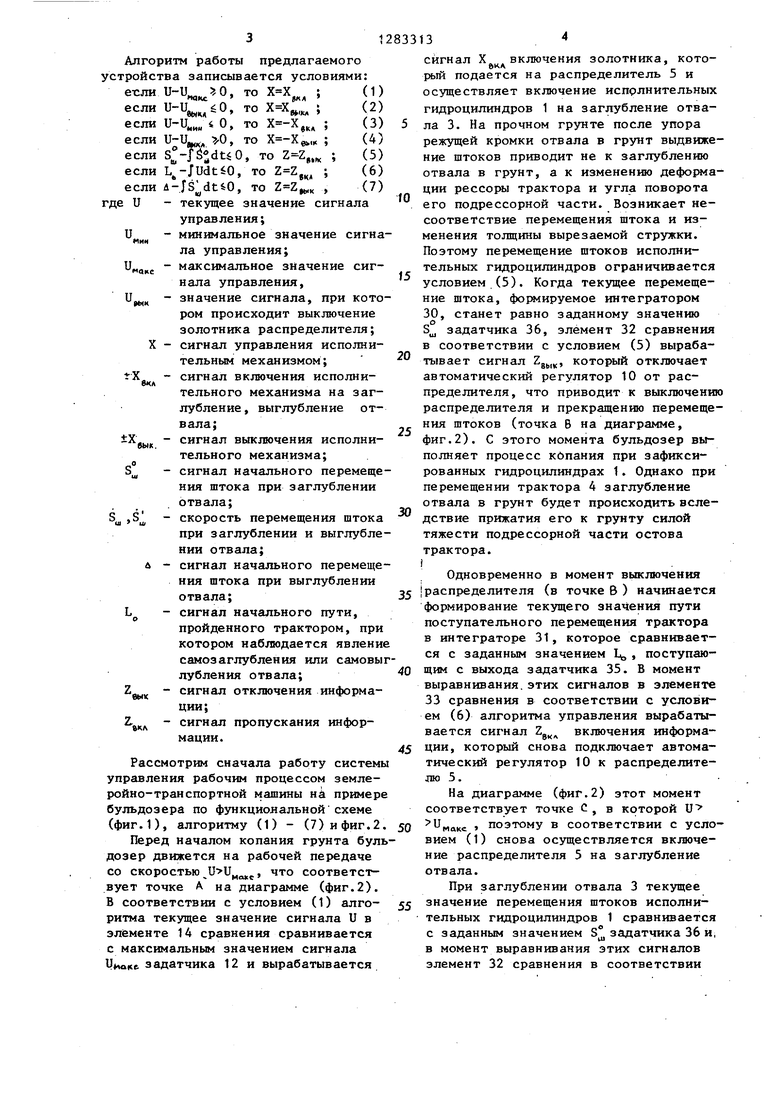
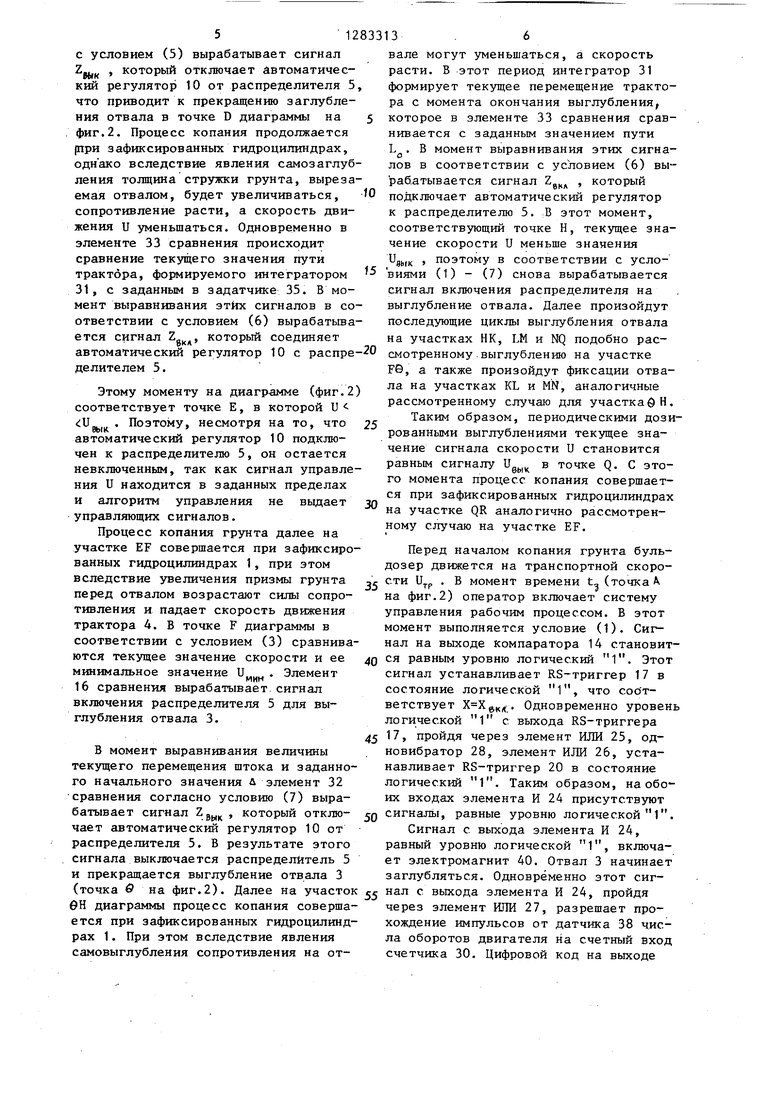
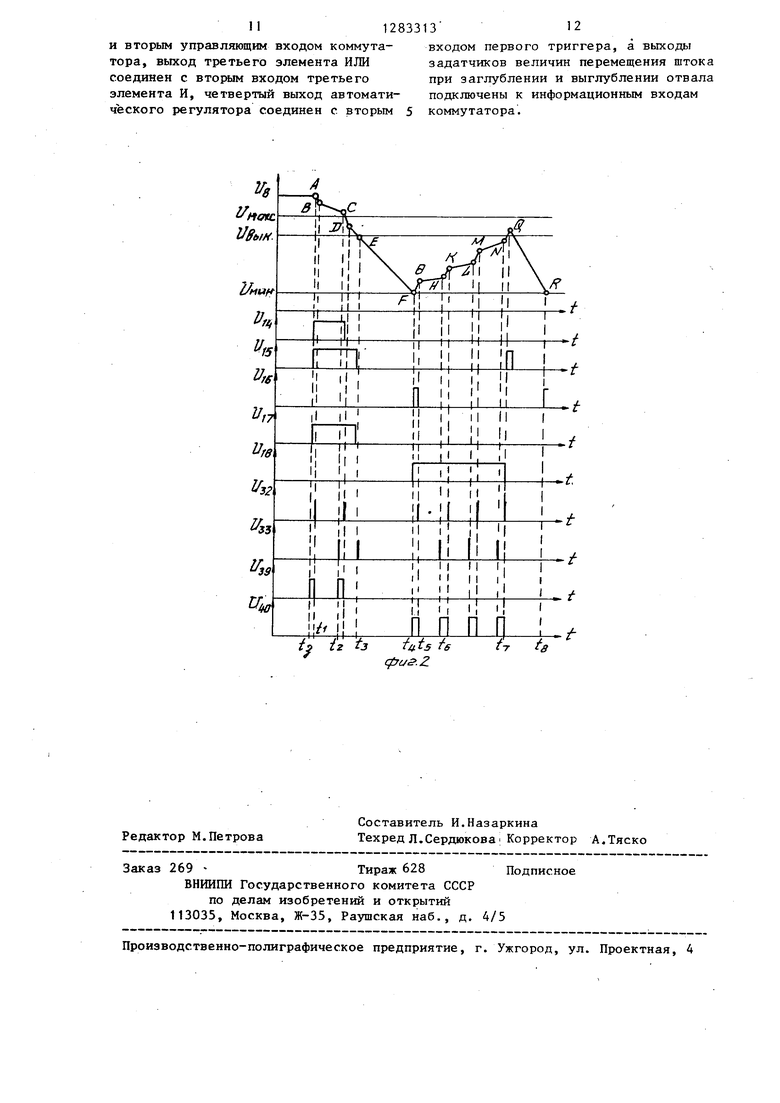
На фиг.1 приведена функциональная .схема системы управления рабочим процессом землеройно-транспортной машины на фиг.2 - временная диаграмма управления рабочим процессом.
Система управления рабочим процес- сом землеройно-транспортной машины на примере бульдозера содержит исполнительные гидроцилиндры 1 (фиг.1), с помощью шарнира 2 соединенные с отвалом 3 и трактором 4, электрогидравлический расп эеделитель 5, соединенный гидромагистралями 6 и 7 с гкдроцилин- драми 1, насос 8, датчик 9 сигнала управления, например доплеровский датчик скорости движения трактора, авто- матический регулятор 10, состоящий из задатчиков 11, 12 и 13 уотавок минимального и., максимального С. сигналов управления и сигнала U..,., вык(3WK
лечения золотника и элементов 14,15 и 16 сравнения текущего значения сигнала и управления с максимальным U значением сигнала управления с сигналим и выключения золотника, а такв 1Х
же с минимальным и значением сигна ла управления (в качестве элементов 14,15 и 16 сравнения используются компараторы), блок управления, состоящий
30 и 31 соответственно с датчиками 38 и 9 скорости штока ИГЦ 1 и движения машины. БУ осуществляет пропускание информации с регулятора 10 в цепи управления или ее прерывание в зависимости от сигналов рассогласования на ЭС 32 и 33. Благодаря этому система управления ограничивает чрезмерные перемещения штока ИГЦ 1 и приводит их в соответствие с поступательным перемещением машины, а следовательно, и с толщиной вырезаемой стружки, что исключает перерегулирование1 2 ил.
из четырех RS-триггеров 17,18,19 и 20, логических элементов И 21,22,23 и 24, логических элементов ИЛИ 25,26 и 27, одновибратора 28, генератора 29, управляемого напряжением (ГУН), блоки интегрирования (двоичные счетчики) 30 и 31, элементы 32 и 33 сравнения текущего положения отвала с заданным значением перемещения штока при заглублении S и при выглублении л отвала, а также сравнение пройденного трактором пути с заданным значением L, при котором начинается самозаглубление (са- мовыглубление) бульдозера, коммутатор 34, задатчик 35 пройденного трактором пути LO, задатчик 36 значения первоначального перемещения штока при заглублении 8щ и задатчик 37 перемещения штока д при выглублении отвала, датчик 38 числа оборотов двигателя трактора 4, включающий в себя постоянный магнит, расположенный на валу насоса 8, и магнитоуправляемый контакт, элек- трогидрораспределитель 5 содержит электромагниты 39 и 40.
На временной диаграмме (фиг.2) обозначены: Ug - текущее значение сигнала скорости движения трактора; U , U,g, и - напряжение на выходах компараторов 14,15 и 16; Ц - напряжение на выходе КЗ-триггера 17 (сигнал ); U|g - напряжение на выходе RS- триггера 18 (сигнал Х ); и,„ - сигрК Л 32
нал на выходе элемента 32 сравнения (сигнал ; - сигнал на выходе элемента 33 сравнения (сигнал Z. ); и,, - напряжения, приложенные к электромагнитам 39 и 40,
Алгоритм работы предлагаемого устройства записывается условиями:
е-сли , то если и-и..ёО, то , ,
цкл
1М
«КА
если и-и„„„ 4 О, то если и-и, 0, то если , то ,. , если L -JUdtiO, то ; если , то
(1) (2) (3) (4) (5) (6) (7)
де и
и
X tX
вКА
±х
бык.
S. ,s: 6 ewK
вкл
текущее значение сигнала управления;
минимальное значение сигнала управления; максимальное значение сигнала управления, значение сигнала, при котором происходит выключение золотника распределителя; сигнал управления исполнительным механизмом; сигнал включения исполнительного механизма на заглубление, выглубление отвала;
сигнал выключения исполнительного механизма; сигнал начального перемещения штока при заглублении отвала;
скорость перемещения штока при заглублении и выглубле- нии отвала;
сигнал начального перемещения штока при выглублении отвала;
сигнал начального пути, пройденного трактором, при котором наблюдается явление самозаглубления или самовыг- лубления отвала; сигнал отключения информации;
сигнал пропускания информации.
Рассмотрим сначала работу системы управления рабочим процессом земле- ройно-транспортной машины н4 примере бульдозера по функциональной схеме (фиг.1), алгоритму (1) - (7)ифиг.2.
Перед началом копания грунта бульдозер движется на рабочей передаче со скоростью , что соответствует точке А на диаграмме (фиг.2). В соответствии с условием (1) алгоритма текущее значение сигнала U в элементе 14 сравнения сравнивается с максимальным значением сигнала Уиаке задатчика 12 и вырабатывается
83313
сигнал X
вкл
включения золотника, кото
fO
5
20
25
30
рый подается на распределитель 5 и осуществляет включение исполнительных гидроцилиндров 1 на заглубление отвала 3. На прочном грунте после упора режущей кромки отвала в грунт выдвижение штоков приводит не к заглублению отвала в грунт, а к изменению деформа ции рессоры трактора и угла поворота его подрессорной части. Возникает несоответствие перемещения штока и изменения толщины вырезаемой стружки. Поэтому перемещение штоков исполнительных гидроцилиндров ограничивается условием (5). Когда текущее перемещение штока, формируемое интегратором 30, станет равно заданному значению S задатчика 36, элемент 32 сравнения в соответствии с условием (5) вырабатывает сигнал Z
ВЫК
который отключает
автоматический регулятор 10 от распределителя, что приводит к выключению распределителя и прекращению перемещения штоков (точка В на диаграмме, фиг.2). С этого момента бульдозер выполняет процесс кбпания при зафиксированных гидроцилиндрах 1. Однако при перемещении трактора 4 заглубление отвала в грунт будет происходить вследствие прижатия его к грунту силой тяжести подрессорной части остова трактора.
Одновременно в момент выключения
I распределителя (в точке В) начинается формирование текущего значения пути поступательного перемещения трактора в интеграторе 31, которое сравнивается с заданным значением Ц,, поступаюЩим с выхода задатчика 35. В момент выравнивания, этих сигналов в элементе 33 сравнения в соответствии с условием (6) алгоритма управления вырабатывается сигнал Zg включения информации, который снова подключает автоматический регулятор 10 к распределителю 5 .
На диаграмме (фиг.2) этот момент соответствует точке С, в которой U
U, поэтому в соответствии с условием (1) снова осуществляется включение распределителя 5 на заглубление отвала.
При заглублении отвала 3 текущее
значение перемещения штоков исполнительных гидроцилиндров 1 сравнивается
с заданным значением S задатчика 36 и, в момент выравнивания этих сигналов элемент 32 сравнения в соответствии
с условием (5) вырабатывает сигнал
который отключает автоматический регулятор 10 от распределителя 5, что приводит к прекращению заглубления отвала в точке D диаграммы на 5 фиг.2. Процесс копания продолжается ртри зафиксированных гидроцилиндрах, одн ако вследствие явления самозаглубления толщина стружки грунта, вырезаемая отвалом, будет увеличиваться, О сопротивление расти, а скорость движения и уменьшаться. Одновременно в элементе 33 сравнения происходит сравнение текущего значения пути трактора, формируемого интегратором 31, с заданным в задатчике 35. В момент выравнивания этих сигналов в соответствии с условием (6) вырабатьша- ется сигнал Z , который соединяет
вале могут уменьшаться, а скорость расти. В этот период интегратор 31 формирует текущее перемещение трактора с момента окончания выглубления, которое в элементе 33 сравнения сравнивается с заданным значением пути 1 . В момент выравнивания этих сигналов в соответствии с условием (6) вырабатывается сигнал Z
екА
который
подключает автоматический регулятор к распределителю 5. В этот момент, соответствующий точке Н, текущее значение скорости и меньше значения UgbiK поэтому в соответствии с усло- 5 ВИЯМИ (1) - (7) снова вырабатывается
сигнал включения распределителя на выглубление отвала. Далее произойдут последующие циклы выглубления отвала на участках НК, LM и NQ подобно расавтоматический регулятор 10 с распре-20 смотренному.выглублению на участке делителем 5.FB, а также произойдут фиксации отваЭтому моменту на диаграмме (фиг.2) соответствует точке Е, в которой U ;U . Поэтому, несмотря на то, что 25
BbtK.
автоматический регулятор 10 подключен к распределителю 5, он остается невключенным, так как сигнал управления и находится в заданных пределах
ла на участках KL и MN, аналогичные рассмотренному случаю для участками.
Таким образом, периодическими дозированными выглублениями текущее значение сигнала скорости U становится
равным сигналу U
вы к
в точке Q. С этого момента процесс копания совершается при зафиксированных гидроцилиндрах
и алгоритм управления не вьщает зо г. «Mt v шпмрлл
- на участке QR аналогично рассмотренуправляющих сигналов.
Процесс копания грунта далее на участке EF совершается при зафиксированных гидроцилиндрах 1, при этом вследствие увеличения призмы грунта перед отвалом возрастают силы сопротивления и падает скорость движения трактора 4. В точке F диаграммы в соответствии с условием (3) сравниваются текущее значение скорости и ее
минимальное значение и„„ . Элемент
мин
16 сравнения вырабатывает сигнал включения распределителя 5 для выглубления отвала 3.
В момент выравнивания величины текущего перемещения штока и заданного начального значения л элемент 32 сравнения согласно условию (7) выра35
ному случаю на участке EF.
Перед началом копания грунта бульдозер движется на транспортной скорости и . В момент времени t«(точка А
на фиг.2) оператор включает систему управления рабочим процессом. В этот момент выполняется условие (1). Сигнал на выходе компаратора 14 становит40 ся равным уровню логический 1. Этот сигнал устанавливает RS-триггер 17 в состояние логической 1, что соответствует . Одновременно уровень логической 1 с вьгхода RS-триггера
45 17, пройдя через элемент ИЛИ 25, од- новибратор 28, элемент ИЛИ 26, устанавливает RS-триггер 20 в состояние логический 1. Таким образом, на обоих входах элемента И 24 присутствуют батывает сигнал , который отклю- Q сигналь, равные уровню логической.
чает автоматический регулятор 10 от распределителя 5. В результате этого сигнала выключается распределитель 5 и прекращается выглубление отвала 3
Сигнал с выхода элемента И 24, равный уровню логической 1, включает электромагнит 40. Отвал 3 начинает заглубляться. Одновременно этот сиг- Сточка О на фиг.2). Далее на участок нал с вьпсода элемента И 24, пройдя 0Н диаграммы процесс копания соверша- через элемент ИЛИ 27, разрешает про- ется при зафиксированных гидроцилинд- хождение импульсов от датчика 38 чис- рах 1. При этом вследствие явленияла оборотов двигателя на счетный вход
самовыглубления сопротивления на от-счетчика 30. Цифровой код на выходе
вале могут уменьшаться, а скорость расти. В этот период интегратор 31 формирует текущее перемещение трактора с момента окончания выглубления, которое в элементе 33 сравнения сравнивается с заданным значением пути 1 . В момент выравнивания этих сигналов в соответствии с условием (6) вырабатывается сигнал Z
екА
который
подключает автоматический регулятор к распределителю 5. В этот момент, соответствующий точке Н, текущее значение скорости и меньше значения UgbiK поэтому в соответствии с усло- ВИЯМИ (1) - (7) снова вырабатывается
ла на участках KL и MN, аналогичные рассмотренному случаю для участками.
Таким образом, периодическими дозированными выглублениями текущее значение сигнала скорости U становится
равным сигналу U
вы к
в точке Q. С это35
ному случаю на участке EF.
Перед началом копания грунта бульдозер движется на транспортной скорости и . В момент времени t«(точка А
на фиг.2) оператор включает систему управления рабочим процессом. В этот момент выполняется условие (1). Сигнал на выходе компаратора 14 становитСигнал с выхода элемента И 24, равный уровню логической 1, включа7 1283313 8
счетчика 30 пропорционален перемеще-1, . Сигнал на инверсном выходе комнию штока, так как оно является функ-паратора 15 становится равным уровню
цией числа оборотов двигателя (ско-логической 1, этот сигнал устанаврость штока пропорциональна угловойливает RS-триггер 17 в состояние ло-
скорости двигателя трактора S f(iO) .5 гического О, что соответствует Х
Счетчик 30 выполняет роль интегра- 8«к
тора, поэтому цифровой код на его вы-В интервале времени от t до t ходе пропорционален перемещению што-(участок EF) трактор движется с ков гидроцилиндров 1. Цифровой код сзафиксированными исполнительными гид- выхода счетчика 30 сравнивается с ко- О роцилиндрами. За счет увеличения при- дом S цифровой схемой 32 сравнения.змы волочения скорость трактора 4 Когда код на выходе счетчика 30 ста-падает до значения U . В момент
ОfМИН
нет равным коду S , т.е. выполняетсявремени t (точка F на фиг.2) выпол- условие (5), на выходе схемы 32 срав-няется условие (3), и сигнал на ин- нения появляется короткий импульс, версном выходе компаратора 16 стано- 1который соответствует , и уста-вится равным уровню логической 1. найливает RS-триггер 19 в состояниеСигналом с инверсного выхода компара- логической 1, RS-триггер 20 - втора 16 RS-триггер 18 устанавливает- состояние логического О. Сигналомся в состояние логической 1 (Х с выхода RS-триггера 20 электромагнитов -Xg ). Уровень логической 1 с 40 выключается, и трактор движетсявыхода RS-триггера 18, пройдя через .с зафиксированным (неуправляемым) ис-элемент ИШ 25, одновибратор 28, эле- полнительным механизмом. Импульс смент ИЛИ 26 устанавливает RS-триггер выхода схемы 32 сбрасывает счетчик20 в состояние логической 1. 30 до нуля, а сигнал логического О Поэтому на выходе логического эле- с выхода элемента И 24 запрещает про-„ „ И 23 появляется уровень логи- хождение импульсов от датчика числа который включает электрооборотов двигателя на счетный вход 39. Отвал 3 начинает выглуб- счетчика 30. Уровень логической 1ляться. Одновременно сигнал с вькода с выхода триггера 19 разрешает про- элемента И 23 разрешает прохождение хождение импульсов с выхода генерато-„мпульсов- от датчика 38 оборотов дви- ра 29, управляемого напряжением (ГУН), , счетный вход счетчика 30. на счетньй вход счетчика 31. Частотаg 2 импульсов на выходе ГУН 29 пропорцио- ., „ задатчика 37 через ком- нальна действительной скорости трак- 35 34, управляемьй сигналами с тора. Счетчик 31 выполняет роль чо
„RS-триггеров 17 и 18, поступает код- тегратора. поэтому цифровой код на/
1на vo, J у L U. (начального перемещения штока при
его выходе пропорционален пути, прои-,. т.
° f , fвыглублении отвала). В момент равенденному трактором. В момент равенства.
,Апства цифрового кода на выходах счеткода на выходе счетчика 31 и кодаin
чика 30 и кода л в момент времени t,
LO, т.е. когда выполняется условие,, „-.„.5
,-„(фиг.2) на выходе схемы 32 сравнения
(6), на выходе схемы 33 сравнения в„
, -Vпоявляется короткий импульс, соответмомент времени t., (фиг. 2) появляется„,, „
2 „ ствующии выработке сигнала ..« . короткий импульс .... , который„
-. /11который установит RS-триггер 20 в
сбрасывает счетчик 31 до нуля и уста- ,,„
„„-onсостояние логического О. Электро
навливает RS-триггер 20 в состояние„.
„ ,,.нит 39 выключается и выглубление Oi -
логич.вала прекращается. Одновременно сигТаким образом, на выходе элемента налом с выхода элемента 32 сравнения И 24 появляется сигнал логической 0 счетчик 30 сбрасывается, а RS-триггер
1, который, включает электромагнит19 устанавливается в состояние логи40 и разрешает прохождение импульсов ческой 1. Сигнал с выходаRS-тригге- от датчика 38 оборотов на счетныйра 19 разрешает прохождение импульсов
вход счетчика 30. Далее произойдетс выхода генератора 29 на счетный
следующий цикл заглубления отвала на вход счетчика 31. Когда код на выхо- участке CD, а также фиксация отваладах счетчика 31 станет равным коду,,
на участке DE. В момент времени момент времени t (фиг.2) короткий
за счет увеличения нагрузки на отвале импульс с выхода схемы 33 сравнения скорость трактора 4 становится равной установит RS-триггер 20 в состояние
вым
20 в
Электромаг „
..« .
ер 20 в
Электро
вым
20 в
Электромаглогической 1. Электромагнит 39 включается, и отвал 3 начинает выглубля- ться. Тот же сигнал с выхода элемента 33 сравнения сбрасывает счетчик 31 до нуля, а сигнал с выхода элемента ; И 23 разрешает прохождение импульсов от датчика 38 оборотов двигателя на счетный вход счетчика 30. Далее произойдут последующие циклы выглубления
интегратора, коммутатор, задатчики величины перемещения штока при заглублении и выглублении отвала, задатчик величины Поступательного перемещения машины и элементов сравнения текущего положения отвала с заданным значением перемещения штока при заглублении и выглублении отвала, причем первый выход автоматического регулятора соедиотвала на участках НК, LM, NQ подобного нен с первым входом первого триггера.
рассмотренному выглублению на участке Рв, а также произойдут фиксации отвала на участках KL, MN аналогично рассмотренному случаю для участка вн. г .
За счет уменьшения нагрузки на отвале скорость трактора растет и достигает значения U . В момент време
ни t, выполняется условие (4), сигнал на выходе компаратора 15 становится равным уровню логической,. Этот сигнал, соответствующий , устанавливает RS-триггер 18 в состояние логического О. За счет инерции гидропривода скорость трактора возраста- ет до точки Q (чуть выше U,). Далее Ьикл работы предлагаемого устройства повторяется,
Пред15.гаемая система управления рабочим процессом землеройно-транс- портной машины позволяет устранить существующее в известном устройстве несоответствие перемещения штоков исполнительных гидроцилиндров и изменение толщины вырезаемой стружки.
Система управления позволяет исключить перерегулирование, повысить точность управления, а также повысить производительность на 12-14%.
Ф о рмула изобретения
Система управления рабочим процессом земх еройно-транспортной машины.
содержащая датчик числа оборотов дви-45 одному из входов второго элемента
гателя, гидрораспределитель и датчик скорости движения машины, выход которого соединен с входом автоматического регулятора, состоящего из задатчиков управляющих сигналов, соединенных д того триггеров и обнуляющим входом
с элементами сравнения, выходы которых являются выходами автоматического регулятора, отличающаяся тем, что, с целью повьш1ения производительности машины путем исключения перерегулирования, в систему введены четыре триггера, четыре элемента И, три элемента ИЛИ, о)новибратор, генератор, управляемый напряжением, два
второго интегратора, выход второго триггера соединен с первым входом четвертого элемента И и вторым вход первого элемента И, йыходы которых 5 подключены к входам третьего элемен та ИЛИ, соединенным параллельно с входами гидрораспределителя, выход первого триггера также соединен с вторым входом четвертого элемента И
интегратора, коммутатор, задатчики величины перемещения штока при заглублении и выглублении отвала, задатчик величины Поступательного перемещения машины и элементов сравнения текущего положения отвала с заданным значением перемещения штока при заглублении и выглублении отвала, причем первый выход автоматического регулятора соединен с первым входом первого триггера.
выход которого соединен с первым входом первого элемента ИЛИ, выход которого через одновибратор соединен с первым входом второго элемента ИЛИ, выход последнего подключен к первому входу второго триггера, второй и третий выходы автоматического регулятора соединены с входами третьего триггера, выход которого соединен с вторым входом первого элемента ИЛИ, с первым входом первого элемента И и первым управляющим входом коммутатора, выход датчика скорости движения машины соединен с входом генератора, управляемого напряжением, выход которого соединен с. первым входом второго элемента И, выход которого подключен к информационному входу первого интегратора, выход последнего подключен к одному из входов первого элемента сравнения, к другому входу которого подключен задатчик величины поступательного перемещения машины, выход первого элемента сравнения подключен к обнуляющему входу первого интегратора, второму входу второго элемента ИЛИ и первому входу четвертого триггера, выход которого соединен с вторым входом второго элемента И, выход датчика числа оборотов двигателя соединен с первым входом третьего элемента И, выход которого соединен с информационным входом второго интегратора, выход которого подключен к
сравнения, к другому входу которого подключен выход коммутатора, выход второго элемента сравнения соединен с вторыми входами второго и четвервторого интегратора, выход второго триггера соединен с первым входом четвертого элемента И и вторым входом первого элемента И, йыходы которых подключены к входам третьего элемента ИЛИ, соединенным параллельно с входами гидрораспределителя, выход первого триггера также соединен с вторым входом четвертого элемента И
и вторым управляющим входом коммутатора, выход третьего элемента ИЛИ соединен с вторым входом третьего элемента И, четвертый выход автоматического регулятора соединен с вторым
входом первого триггера, а выходы задатчиков величин перемещения штока при заглублении и выглублении отвала подключены к информационным входам коммутатора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| Способ управления процессом копания | 1985 |
|
SU1307041A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Способ управления ковшом скрепера и устройство для его осуществления | 1987 |
|
SU1495417A1 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU941503A1 |
| Способ управления ковшом скрепера | 1987 |
|
SU1578278A1 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU953838A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| Система автоматического управления отвалом бульдозера | 1984 |
|
SU1182128A1 |
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 1996 |
|
RU2109883C1 |
Изобретение позволяет повысить производительность землеройно-транспортных машин путем исключения перерегулирования. Для этого в систему дополнительно введен блок.управления (БУ), состоящий из четырех триггеров 17-20, четырех элементов И 21-24, трех элементов ИЛИ 25-27, одновибра- тора 28 и генератора 29, управляемого (/)
8
Редактор М.Петрова
Заказ 269 -Тираж 628Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель И.Назаркина
Техред Л.Сердюкова; Корректор А.Тяско
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
