() УСТРОЙСТВО для ЗАДАНИЯ И РЕГУЛИРУЕМОГО ИЗМЕНЕНИЯ НАКЛОНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания положения объекта в пространстве | 1981 |
|
SU953460A1 |
| Устройство для задания и регулируемого изменения наклона | 1980 |
|
SU909569A1 |
| Устройство для задания и регулируемого изменения угла наклона | 1985 |
|
SU1276907A1 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| Юстировочное устройство | 1990 |
|
SU1760515A1 |
| Центробежный стенд для моделирования параметров движения | 1974 |
|
SU659953A1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2012 |
|
RU2504735C1 |
| Устройство для испытания наклономеров | 1977 |
|
SU731291A1 |
| Устройство для моделирования параметров движения | 1982 |
|
SU1076837A1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
, Изобретение относится к аппаратуре для испытания и калибровки различных прецизионных измерительных преобразователей , прежде всего силоизмерительных датчиков, чувствительных элементов акселерометров и т.п. в условиях, когда требуется точно зад€1ть, контролировать и изменить положение испытуемых объектов относительно горизонтальной плоскости или местной вертикали.
Известны высокочастотные устройства для задания и регулируемого изменения наклонов, основанные на принципе преобразования прямолинейного микрометренного перемещения платформы для размещения испытуемых объектов в наклон платформы относительно основания 13 и 2.
Такие устройства, прследнее из которых обладает исключительно высокой точностью задания наклона и Малым шагом дискретности его изменения, построены с использованием газовых
шарниров как в случае маятниковой подвески платформы, так и в звеньях соединения ее с основанием и механизмом перемещения в направлении, перпендикулярном оси наклона плат(1гармы. Это вызывает повышение требования к точности изготовление и сборки, усложняет устройство.
Цель изобретения - упростить уст10ройство для снижения его точностных характеристик, т.е. при сохранении принципа построения устройства, содержащего платформу для размещения испытуемых объектов, установленную
15 с возможностью наклона относительно основания под воздействием механизма, сообщающего платформе прямолинейное перемещение в направлении, перпендикулярном оси наклона.
20
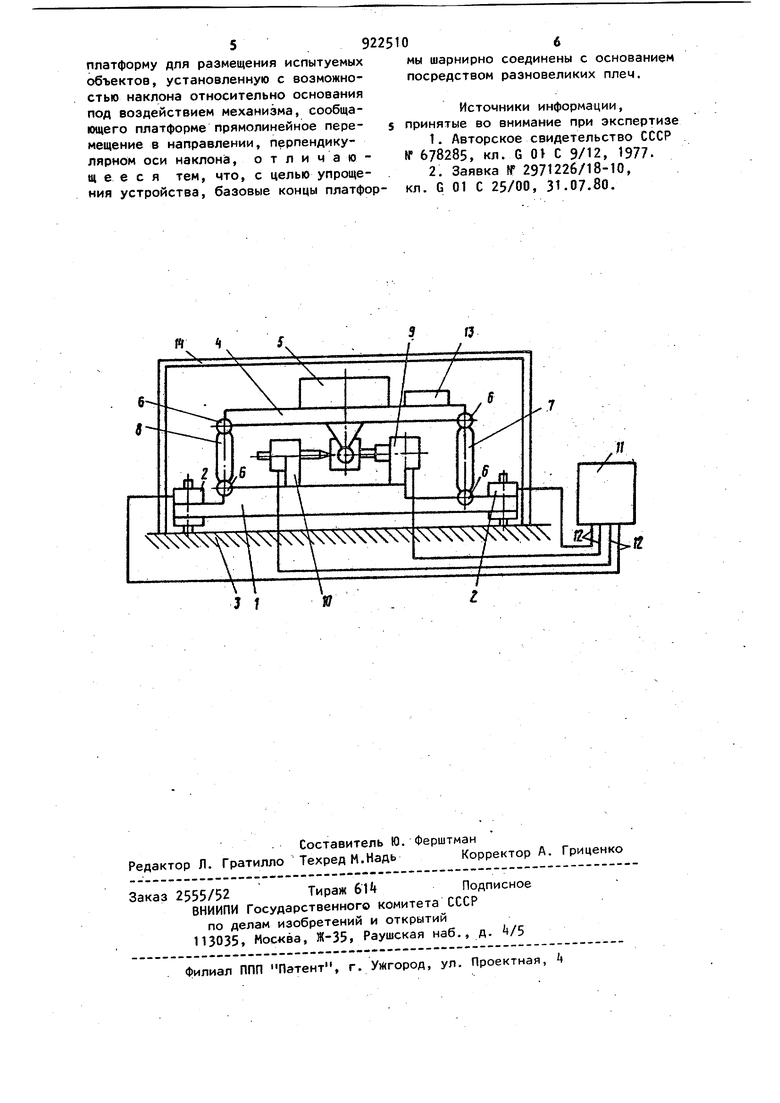
Указанная цель достигается тем, что базовые концы платформы шарнирно соединены с основайием посредством разновеликих плеч. 392 На чертеже представлена конструктивная схема варианта реализации уст ройства. Устройство смонтировано на основании 1, которое с помощью юстировоч ных опор 2 установлено на фундаменте 3. Платформа k, на которой размещены испытуемые объекты 5, сомленена посредством безлюфтовых шарниро 6 и разновеликих плеч 7 и 8 с основанием 1. На основании 1 укреплен ме ханизм 9 перемещения и измеритель 10 перемещения, связанные с испытательной платформой 1, Блок управления 11 установлен на фундаменте 3 и связан по каналам управления и каналам приема информации 12 с юстировочными опорами 2, механизмом 9 и измерителем 10. На платфоруме А установлен индикатор горизонта 13, например емкостной ртутный измеритель горизонта Все устройство закрыто термогерметич ным кожухом 14. Перед началом работы испытуемый объект 5 и индикатор горизонта 13 уста навливают на платформу Ц и закрывают устройство термогерметичным кожухом , С помощью блока управления П юстировочных опор 2, механизма 9, измерителя перемещения 10 и индикатора горизонта 13 платформу k устанавливают в исходное положение, которое определяется программой предст ящих испытаний. Пол. термогерметичным кожухом 14 создают вакуум для уменьшения влияния на точность работы уст ройства внешних воздействий - темпер туры давления и т.д. Для задания платформе 4 заданного угла с помощью механизма 9 задают линейное смещение t, которое заранее расчитано и запрограммировано, и фик сируется измерителем 10. Затем задаются аналогичным способом другие фик сированные точки. Перемещение платформы k может выполняться как в прямом, так и в обратном направлениях. После выполнения заданных операций платформа 4 возвращается в исходное, например горизонтальное положение. Точность задания углового положения объектов определяется точностью измерения линейного перемещения плат формы 4, а также точностью предварительной выставки ее в исходное положение, например горизонтальное. Разрешающая способность устройства и ее точность определяются в ОСНОВНОМ соотношением разновеликих плеч 7 и 8, величиной базовой длины между шарнирами 6, а также стабильностью этих параметров. Зависимость угла наклона платформы 4 от величины ее линейного смещения определяется формулой h - Ihi- тг - (н sin ct где h - высота короткого плеча 8; Н - высота длинного плеча 7. Например, при величине базовой длины L 500 мм, Н 100 мм, h 95 мм и смещении t 100 мкм платформа 4 наклонится на угол d 0,0011 дуг.с, а при смещении t 50 мм угол d 70 дуг.с. Устройство имеет весьма большой диапазон задаваемых углов и высокую разрешающую способность. При линейном смещении t 1,0 мкм угол наклона платформы k составит 1 X .с. При этом необходимо иметь ввиду, что фундамент 3, на котором устанавливается устройство, должен обладать /углОвой стабильностью выше, чем минимальная величина задаваемого угла. Одним из важных достоинств предлагаемого устройства является возможность его метрологической аттестации, что в большинстве случаев невозможно сделать с аналогичными устройствами, имеющими точность выше 0,03 дуг. сек. В предлагаемом устройстве для его метрологической аттестации необходимо аттестовать базовую длину L, высоту плеч маятника H,h и измеритель 10, в качестве которого можно применить любой промышленный прибор (задатчик длины), имеющий погрешность i 1,0 мкм. Для уменьшения влияния изменения окружающей, температуры на точность устройства его основание 1, платформа 4, разновеликие плечи 7 и 8 изготавливаются из материала, имеющего малый и стабилЬ|Ный коэффициент линейного расширения, например из диабаза, ситала и др. материалов. Формула изобретения Устройство для задания и регулируемого изменения наклона, содержащее
платформу для размещения испытуемых объектов, установленную с возможностью наклона относительно основания под воздействием механизма, сообщающего платформе прямолинейное перемещение в направлении, перпендикулярном оси HaKnoHia, отличающееся тем, что, с целью упрощения устройства, базовые концы платфор К Чч
мы шарнирно соединены с основанием посредством разновеликих плеч.
Источники информации, принятые во внимание при экспертизе
.И Ж 4V4 X KV4V4
