Изобретение относится к области автоматического регулирования, а конкретно к системам управления многостепенными динамическими стендами, содержащими в своем составе несколько следящих систем, каждая из которых управляет одним исполнительным механизмом, например исполнительными силовыми гидроцилиндрами, управляющими единой нагрузкой шестистепенного динамического стенда-тренажера авиационной техники, работающего в комплексе полунатурного моделирования условий полета при тренировках и обучении экипажей самолетов.
Известны динамические стенды, предназначенные для использования в тренажерах, например динамический стенд КТС ТУ-204 [1], предназначенный для имитации акселерационных эффектов и содержащий платформу с полезной нагрузкой, управляющую шестью силовыми гидроцилиндрами. Каждый силовой гидроцилиндр имеет устройство для измерения длины его выдвижения и в комплекте с ним, гидроусилителем и электрической схемой управления образует следящую систему, управляемую внешним задающим сигналом, поступающим из системы управления тренажером и обеспечивающим разложение управляющих сигналов по координатам, соответствующим каждому силовому цилиндру.
Упрощенная кинематическая схема шестистепенного динамического стенда, представленная на фиг. 1, содержит платформу, условно обозначенную буквами ABC, на которой располагается полезная нагрузка (модель кабины самолета) с центром тяжести в точке H. Платформа опирается на шесть силовых гидроцилиндров, обозначенных цифрами от 1 до 6 и закрепленных на основании (на полу) в точках D, E и F. При соответствующем управлении длиной выдвижения силовых гидроцилиндров возможно задание платформе движения с шестью степенями свободы. Каждый силовой цилиндр снабжен устройством для измерения длины его выдвижения, что позволяет на базе каждого силового цилиндра при использовании электрических и гидравлических усилительных устройств построить замкнутую следящую систему с электрическим входом.
Одним из главных условий качественной работы комплекса приводов стенда, обеспечивающих имитацию движения реального объекта, является синхронность их работы, что обеспечивается равенством их частотных характеристик и их реакций на управляющие и возмущающие воздействия. При этом требуется обязательное равенство переходных процессов приводов при скачках управляющего воздействия вверх и вниз для каждого привода. Выполнение этих условий осложняется тем, что каждый привод находится под воздействием существенной неуравновешенности, обусловленной весом платформы и полезной нагрузки, приходящимися на каждый силовой цилиндр. Вследствие этого перерегулирование в переходном процессе при скачке управляющего воздействия по направлению неуравновешенности получается значительно большим, чем против неуравновешенности. Компенсировать влияние неуравновешенности можно путем использования силовых цилиндров с односторонним штоком [2, с. 120, 121], имеющим разную эффективную площадь поршня при движении вверх и вниз, но при этом получаются разные расходные (скоростные) характеристики гидропривода при движении вверх и вниз. Существует также техническое решение, компенсирующее неуравновешенности нагрузки на силовом цилиндре и заключающееся в том, что силовой цилиндр снабжается третьей полостью, запитываемой постоянным давлением от гидроаккумулятора. Это техническое решение используется в приводе изделия П-800 [3] , где применяется рулевой агрегат РА-83 [4], имеющий третью полость, с помощью которой компенсируется неуравновешенность нагрузки изделия П-800. Однако это техническое решение не позволяет удовлетворительно решить задачу обеспечения равенства переходных процессов следящих приводов динамического стенда из-за того, что в стенде неуравновешенность, воздействующая на каждый силовой цилиндр, постоянно изменяется в зависимости от углового положения нагрузочной платформы и ее линейных перемещений в горизонтальной плоскости. Так, например, для силовых цилиндров 1 и 2 (фиг. 1) неуравновешенности даже может поменять знак при наклоне платформы вокруг оси BC на такой угол α, при котором перпендикуляр, опущенный из точки H', характеризующий положение центра тяжести нагрузки при наклоне платформы, пройдет левее линии BC. Таким образом, вышеописанные методы компенсации неуравновешенности не позволяют решить задачу обеспечения равенства переходных процессов приводов вверх и вниз, вследствие существенного изменения неуравновешенности, воздействующей на силовые цилиндры при угловых и линейных перемещениях платформы с нагрузкой. Существенное улучшение характеристик приводов и выравнивание параметров переходных процессов сверху и снизу можно получить за счет использования в структуре приводов коррекции по сигналу скорости, ускорению или дифференциала ошибки [2, стр. 140]. Чем больше коэффициенты передачи контуров обратных связей по скорости и ускорению, тем меньше разница в переходных процессах сверху и снизу при наличии неуравновешенности. Такие технические решения применены в динамическом стенке КТС ТУ-204 [1], однако в связи с имеющимися ограничениями, накладываемыми условиями устойчивости контуров привода, не удалось обеспечить такие коэффициенты передачи контуров следящей системы, которые позволили бы полностью уравнять переходные процессы при движении по и против неуравновешенности и удовлетворительно решить задачу обеспечения синхронной работы всех следящих приводов динамического стенда.
Предлагаемое изобретение направлено на повышение точности воспроизведения стендом управляющих воздействий за счет обеспечения равенства переходных процессов следящих приводов динамического стенда при изменении действующих нагрузок на каждый привод при движении платформы вверх или вниз. Достижение равенства переходных процессов вверх и вниз для каждого привода обеспечивается за счет введения в структуру привода устройства реализующего компенсацию влияния действующей на силовой цилиндр неуравновешенности, определяемой по совокупности величин перемещений штоков всех силовых цилиндров динамического стенда.
Сущность предлагаемого технического решения заключается в том, что в состав каждого гидропривода динамического многостепенного стенда, содержащего платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового цилиндра, причем электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен к второму входу гидроусилителя, а вход чувствительного элемента связан с платформой, включены вычислительное устройство и две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, включенные между сумматором и усилителем мощности, причем детекторы в параллельных цепях имеют разную полярность, а управляющие входы управляемого усилителя-ограничителя соединены с выходом вычислительного устройства, входы которого соединены с выходами чувствительных элементов гидроприводов многостепенного стенда.
Материалы заявки поясняются фиг. 1 - 7, где приведены:
на фиг. 1 - кинематическая схема шестичленного стенда;
на фиг. 2 - функциональная схема следящих приводов предлагаемого динамического стенда;
на фиг. 3 - схема устройства для вычисления управляющего сигнала на управляемый усилитель-ограничитель;
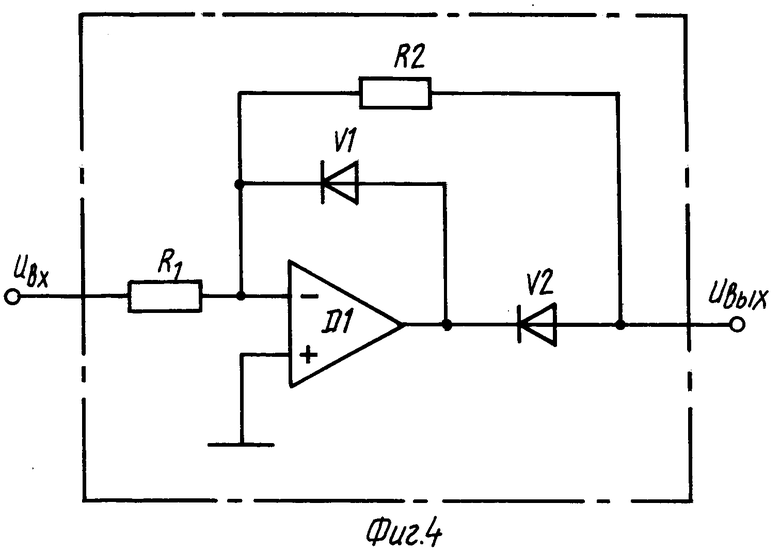
на фиг. 4 - схема детектора;
на фиг. 5 - схема управляемого усилителя-ограничителя 13;
на фиг. 6 - схема управляемого усилителя-ограничителя 14;
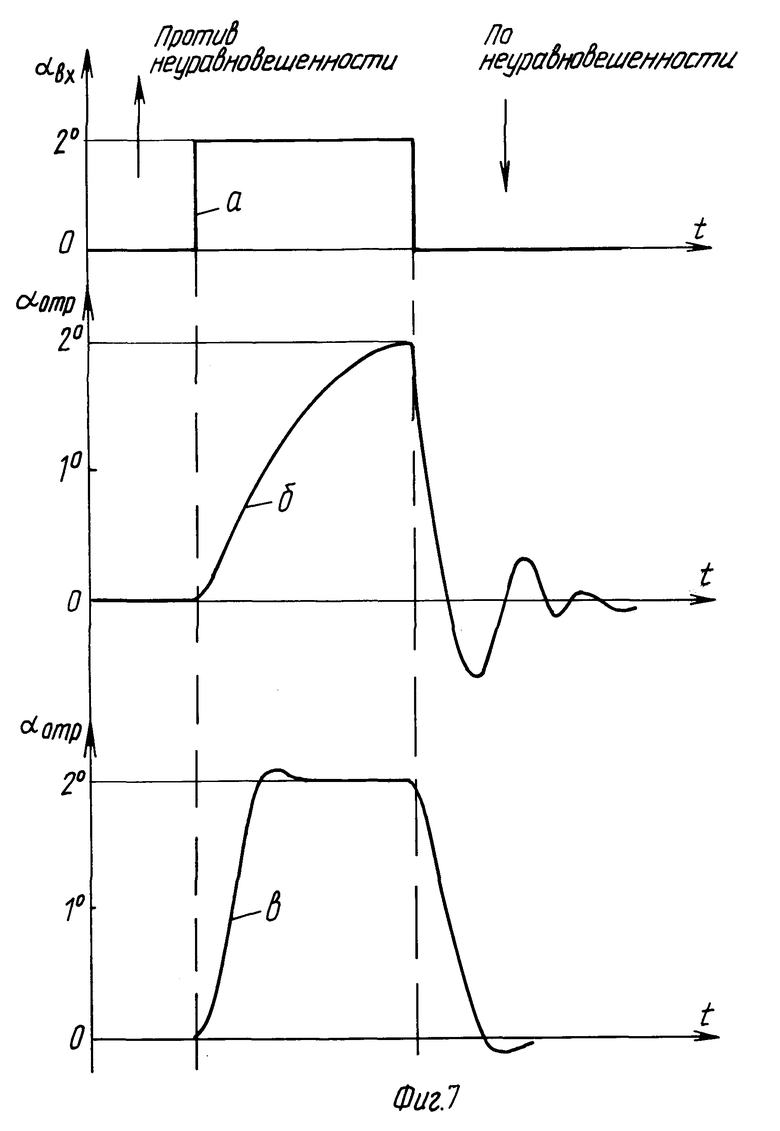
на фиг. 7 - примеры переходных процессов следящих электрогидроприводов стенда при отработке скачков управляющего воздействия до и после внедрения предлагаемого технического решения.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, изложены по функциональной схеме следящих приводов предлагаемого динамического стенда, представленной на фиг. 2.
Предлагаемый динамический стенд состоит из платформы 1, источника гидравлического питания 2 и нескольких одинаковых электрогидравлических приводов, по количеству силовых цилиндров, на которые опирается платформа. Для упрощения на фиг. 2 изображено три следящих привода, обозначенных позициями 3, 4 и 5. Каждый из следящих приводов состоит из последовательно соединенных чувствительного элемента 6, сумматора 7, усилителя мощности 8, гидроусилители 9 и силового цилиндра 10, механически связанного с платформой 1. В каждом из следящих приводов 3, 4 и 5 выход источника гидропитания 2 соединяется с вторым входом гидроусилителя 9. Предлагаемое изобретение отличается от прототипа КТС ТУ-20 тем, что между сумматором 7 и усилителем мощности 8 включено параллельное соединение двух последовательных цепей, каждая из которых состоит из детектора 11 или 12, управляемого усилителя-ограничителя 13 и 14, причем детекторы 11 и 12 имеют разную полярность пропускаемого сигнала.
Каждый следящий электрогидропривод 3, 4, 5 содержит вычислительное устройство 15, выход которого соединен с управляющими входами усилителей-ограничителей 13, 14. Каждый из следящих электрогидроприводов имеет электрический вход, соединенный с входом сумматора 7, а вычислительное устройство 15 имеет входы, количество которых равно количеству следящих электрогидроприводов в динамическом стенде, и эти входы соединены с выходами чувствительных элементов 6 всех электрогидроприводов 3, 4, 5. Имеющиеся в схеме электрогидропривода корректирующие звенья и в прототипе, и в предлагаемом изобретении не показаны.
Принцип действия предлагаемой семы заключается в том, что при движении против неуравновешенности коэффициент усиления привода и уровень ограничения выходного сигнала увеличиваются, а при движении по неуравновешенности коэффициент усиления и уровень ограничения выходного сигнала управляемого усилителя 13 или 14 (фиг. 2) и соответственного следящего электрогидропривода 3, 4 или 5 уменьшается. Причем это увеличение или уменьшение производится в зависимости от взаимного положения силовых цилиндров динамического стенда по сигналу вычислительного устройства 15, учитывающего изменение момента неуравновешенности, действующего на данный силовой цилиндр.
На фиг. 3 представлена принципиальная схема устройства, формирующего сигнал, приближенно характеризующий изменение неуравновешенности, воздействующий на силовой цилиндр в процессе управления стендом.
В качестве задающего сигнала данное устройство использует информацию о взаимном положении штоков всех силовых гидроцилиндров, поступающих с их датчиков перемещения.
На фиг. 3 обозначениям от U1 от U6 соответствуют выходные напряжения с датчиков перемещения штоков силовых цилиндров. Устройство A1 обеспечивает выделение на его выходе минимального напряжения из двух поступающих на его вход напряжений U1 и U2. Разность четверти суммы напряжений U1, U5, U3 и U6 (определяемая сумматором Σ1 и делителем с коэффициентом K=0,25) и минимального из напряжений U1 и U2, определяемая сумматором Σ2, характеризует наклон платформы вокруг оси BC (фиг. 1). Дополнительно поступающее на сумматор Σ2 постоянное напряжение U0 характеризует угол наклона платформы, при котором неуравновешенность платформы относительно оси BC равна нулю. Это произойдет при таком подъеме точки A, когда перпендикуляр, опущенный из точки H, пройдет через линию BC (фиг.1). При наклоне платформы выше или ниже этого угла меняется знак неуравновешенности на силовых цилиндрах 1 и 2, а само значение разности, получаемой на выходе сумматора Σ2, характеризует величину неуравновешенности на силовых цилиндрах 1 и 2.
Разность двух сумм (U3 +U6) и (U1 + U2), получающаяся на выходе сумматора Σ5, характеризует смещение платформы в горизонтальной плоскости и соответственно отклонение цилиндров 1 и 2 в вертикальной плоскости внутрь или наружу относительно конструкции стенда. Поскольку отклонение цилиндров 1 и 2 и влево и вправо уменьшает составляющую неуравновешенности, направленную вдоль оси силового цилиндра, выходной сигнал с сумматора Σ5 через устройство выделения модуля A2 и масштабный делитель K2 подключается на вход сумматора Σ7, к другому входу которого подключен выход сумматора Σ2 через устройство выделения модуля A3 и масштабный делитель K1. На сумматоре Σ7 производится вычитание выходного сигнала делителя K2 из выходного сигнала делителя K1.
На сумматоре Σ6 получается разность напряжений U1 и U2, характеризующая разность наклонов силовых цилиндров 1 и 2 и распределением неуравновешенности, действующей в точке A между силовыми цилиндрами 1 и 2. Если их длины и соответственно U1 и U2 равны, то неуравновешенности, воздействующие на силовые цилиндры 1 и 2 равны, если U1 = U2, то и неуравновешенности силовых цилиндров 1 и 2 также не равны, что обеспечивается связью с выхода сумматора Σ6 с входом сумматора Σ7 через масштабный делитель K3.
Выходной сигнал вычислительного устройства должен иметь знак, соответствующий выходному сигналу сумматора Σ2. С целью обеспечения этого соответствия и исключения влияния неидеальности параметров устройства на знак выходного сигнала вычислительного устройства, выходной сигнал сумматора Σ7 через детектор Д подключен к входу блока Α4, который обеспечивает пропорциональную передачу входного сигнала на выход со знаком, соответствующим знаку выходного напряжения сумматора Σ2.
Приведенные на фиг. 2 детекторы 11 и 12 имеют разную полярность, и поэтому один из них (например, детектор 11) пропускает только положительное напряжение с выхода сумматора 7, а другой (например, детектор 12) - отрицательное. Возможная схема детектора, пропускающего положительное напряжение, представлена на фиг. 4. Детектор, пропускающий отрицательные напряжения, имеет такую же схему, но с диодами V1, V2, включенными в обратном направлении.
Одна из возможных простейших схем управляемого уислителя-ограничителя 13 представлена на фиг. 5. Входное напряжение Uвх управляемого усилителя-ограничителя через резистор R5 поступает на вход инвертирующего операционного усилителя D2, в обратной связи которого включен диод V3, осуществляющий дополнительную блокировку прохождения через усилитель отрицательного напряжения, поступающего на резистор R5. Коэффициент передачи операционного усилителя D2 по положительному сигналу определяется отношением суммы сопротивлений резистора R9 и полевого транзистора V1 к сопротивлению резистора R5. Изменение сопротивления полевого транзистора обеспечивается управляющим сигналом Uупр, поступающим с вычислительного устройства 15 (фиг. 2), и усиленным инвертирующим операционным усилителем D1. При этом отношение сопротивлений резисторов R6 и R8 обеспечивает необходимую степень влияния усиленного напряжения Uупр на сопротивление полевого транзистора V1 и соответственно на коэффициент усиления операционного усилителя D2. С помощью резистора R4 и переменного резистора R3 обеспечивается выставка начального сопротивления транзистора V1 и соответственно начального коэффициента усиления операционного усилителя D2. Необходимое направление изменения сопротивления полевого транзистора V1 обеспечивается подключением к затвору транзистора V1 инвертированного или неинвертированного сигнала Uупр. Ограничение выходного напряжения операционного усилителя D2 обеспечивается при отсутствии напряжения Uупр с помощью резисторов R10, R11 и диода V2, поскольку при достижении в общей точке резисторов R10, R11 и диода V2 напряжения, равного напряжению открытия диода V2, возникает дополнительная обратная связь операционного усилителя D2 через резистор R10 и диод V2. При этом сопротивление резистора R10 выбирается много меньшим суммарного сопротивления резистора R9 и полевого транзистора V1 и меньше сопротивления резистора R6, что приводит при открытии диода V1 к резкому снижению коэффициента передачи и практическому ограничению сигнала на выходе операционного усилителя D2. Подключение к общей точке резисторов R10, R11 еще и выходного напряжения операционного усилителя D1 через резистор R7 обеспечивает влияние сигнала Uупр на напряжение в общей точке резисторов R10, R11 и соответственно влияние на уровень ограничения выходного сигнала операционного усилителя D2. Таким образом схема обеспечивает необходимое уменьшение или увеличение коэффициента усиления операционного усилителя D2 путем изменения сопротивления полевого транзистора V1, а также изменение ограничения выходного напряжения операционного усилителя D2 путем изменения напряжения в общей точке резисторов R10, R11. Выход операционного усилителя D2 является выходом управляемого усилителя-ограничителя.
На фиг. 6 изображена схема управляемого усилителя-ограничителя 14. Эта схема отличается от схемы, представленной на фиг. 5, тем, что полевой транзистор V1 управляется неинвертированным сигналом Uупр, а диоды V2 и V3 включается в обратном направлении. Кроме того, резистор R11 подключается к противоположному источнику питания. Это обеспечивает блокирование прохождения входного положительного напряжения, а также регулирование коэффициента усиления и уровня ограничения выходного сигнала при наличии входного сигнала отрицательной полярности в зависимости от величины и знака напряжения, поступающего на управляющие входы управляемых усилителей-ограничителей 13, 14 (фиг. 2) с выхода вычислительного устройства 15.
Предлагаемое техническое решение проверено в составе макетного образца во ВНИИ "Сигнал". Стендовые испытания, а также результаты электронного моделирования показали, что при его внедрении обеспечивается равенство переходных процессов при движении против и по неуравновешенности.
Результаты эксперимента показали, что параметры переходных процессов против и по неуравновешенности после внедрения предлагаемого решения практически совпали.
На фиг. 7 приведены переходные процессы электрогидроприводов, полученные на стенде при воздействии существенной неуравновешенности, до и после внедрения предлагаемого технического решения.
На фиг. 7 использованы следующие обозначения:
а - график изменения входного воздействия;
б - график отработки входного воздействия электрогидроприводом до внедрения предлагаемого технического решения;
в - график отработки входного воздействия электрогидроприводом после внедрения предлагаемого технического решения.
Как видно из графика "б" (фиг. 7) до внедрения предлагаемого технического решения при настройке привода на апериодический процесс при отработке скачка управляющего воздействия против неуравновешенности получается колебательный процесс с несколькими перебегами при отработке скачка управляющего воздействия по неуравновешенности. Это ограничивает устойчивость привода и точность его работы.
После внедрения предлагаемого технического решения удалось получить практически одинаковые графики отработки скачков управляющего воздействия против и по неуравновешенности, график "в". При этом удалось существенно увеличить коэффициент передачи привода, о чем можно судить по значительному уменьшению времени отработки скачка входного воздействия против неуравновешенности.
По результатам экспериментальных исследований предлагаемое техническое решение внедрено в документацию шестистепенного динамического стенда, разрабатываемого совместно ПКБМ г. Пенза и ВНИИ "Сигнал" г. Ковров.
Литература
1. Техническое описание динамического стенда КТС ТУ-204. ПКБМ г. Пенза.
2. Ю. И. Чупраков. Гидропривод и средства гидроавтоматики. М. Машиностроение, 1979.
3. Привод изделия П-800 ПБ1.331.082. РО. ВНИИ "Сигнал" г. Ковров
4. Рулевой агрегат РА-83. НП АООТ "Родина" г. Москва.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2004 |
|
RU2259597C1 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ДИНАМИЧЕСКИЙ СТЕНД | 2005 |
|
RU2285959C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2005 |
|
RU2284047C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |




Динамический многостепенной стенд может быть использован в области автоматического регулирования, а конкретно в области систем управления многостепенными динамическими стендами-тренажерами, содержащими в своем составе несколько следящих систем,управляющих общей нагрузкой и работающих в условиях изменяющейся существенной неуравновешенности. Изобретение позволяет достичь повышения точности воспроизведения стендом управляющих воздействий. Стенд содержит платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве. Каждый привод имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового цилиндра. Электрический вход управления подключен к второму входу сумматора. Выход источника гидропитания подключен к второму входу гидроусилителя. Вход чувствительного элемента связан с платформой. В состав каждого гидропривода включены вычислительное устройство и две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, включенные между сумматором и усилителем мощности. Детекторы в параллельных цепях имеют разную полярность. Управляющие входы управляемого усилителя-ограничителя соединены с выходом вычислительного устройства. Входы вычислительного устройства соединены с выходами чувствительных элемлентов гидроприводов. 7 ил.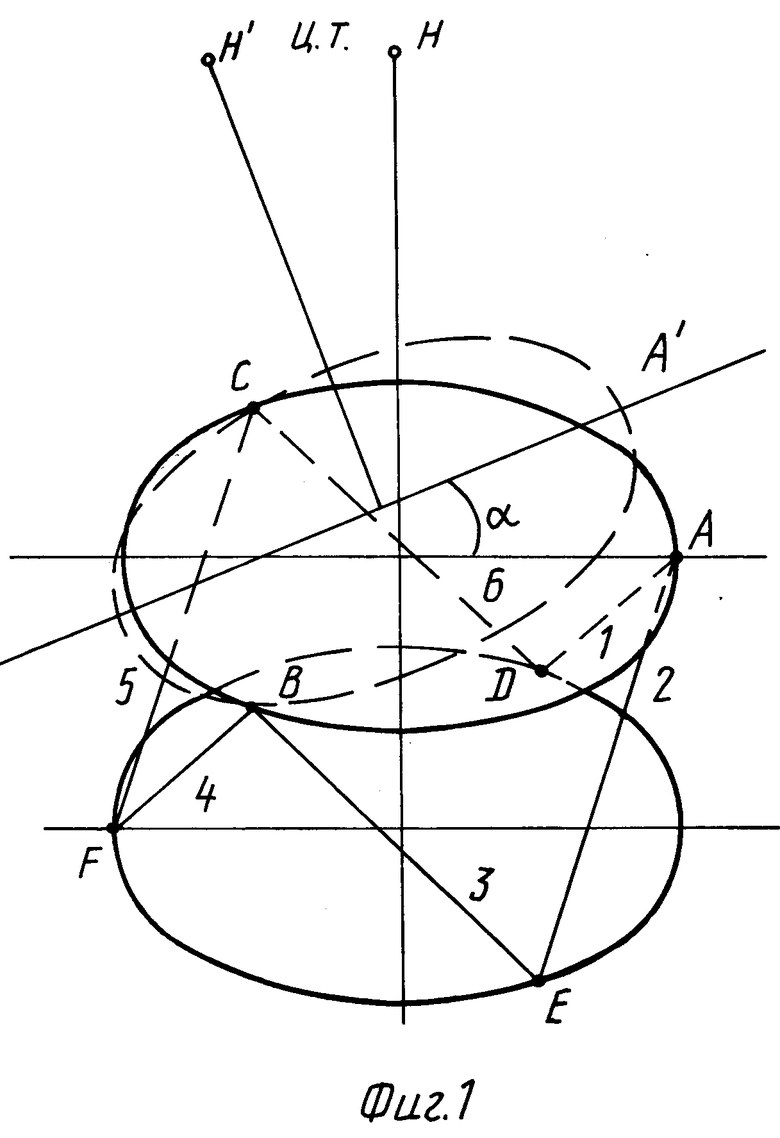
Динамический многостепенной стенд, содержащий платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового цилиндра, причем электрический вход управления подключен к второму входу сумматора, выход источника гидропитания подключен к второму входу гидроусилителя, а вход чувствительного элемента связан с платформой, отличающийся тем, что в состав каждого гидропривода включены вычислительное устройство и две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, включенные между сумматором и усилителем мощности, причем детекторы в параллельных цепях имеют разную полярность, а управляющие входы управляемого усилителя-ограничителя соединены с выходом вычислительного устройства, входы которого соединены с выходами чувствительных элементов гидроприводов.
| Ротационный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию, и т.п. работ | 1924 |
|
SU204A1 |
