(54) УСТРОЙСТВО ДЛЯ ПРАВКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ПРАВКИ ИЗДЕЛИЙ-:оо;ознАЯ^-НГЬЗ.;;х1:н';Е-^ш^-•'&/;мо7гкл | 1971 |
|
SU307832A1 |
| СПОСОБ ПРАВКИ ДИСКОВЫХ ПИЛ | 2002 |
|
RU2227763C2 |
| Листоправильная машина | 1987 |
|
SU1449173A1 |
| Устройство для правки и резки проволоки на мерные заготовки | 1990 |
|
SU1796328A1 |
| ЛИСТОПРАВИЛЬНАЯ МАШИНА | 2008 |
|
RU2365445C1 |
| ЛИСТОПРАВИЛЬНАЯ МАШИНА | 2001 |
|
RU2205082C2 |
| Станок для правки пластин | 1989 |
|
SU1706761A1 |
| Машина для правки сортового проката | 1986 |
|
SU1409369A1 |
| РОЛИКОВАЯ МАШИНА ДЛЯ ПРАВКИ ПОЛОСОВОГО ПРОКАТА | 1981 |
|
SU1080295A1 |
| Листоправильная машина | 1986 |
|
SU1362529A1 |
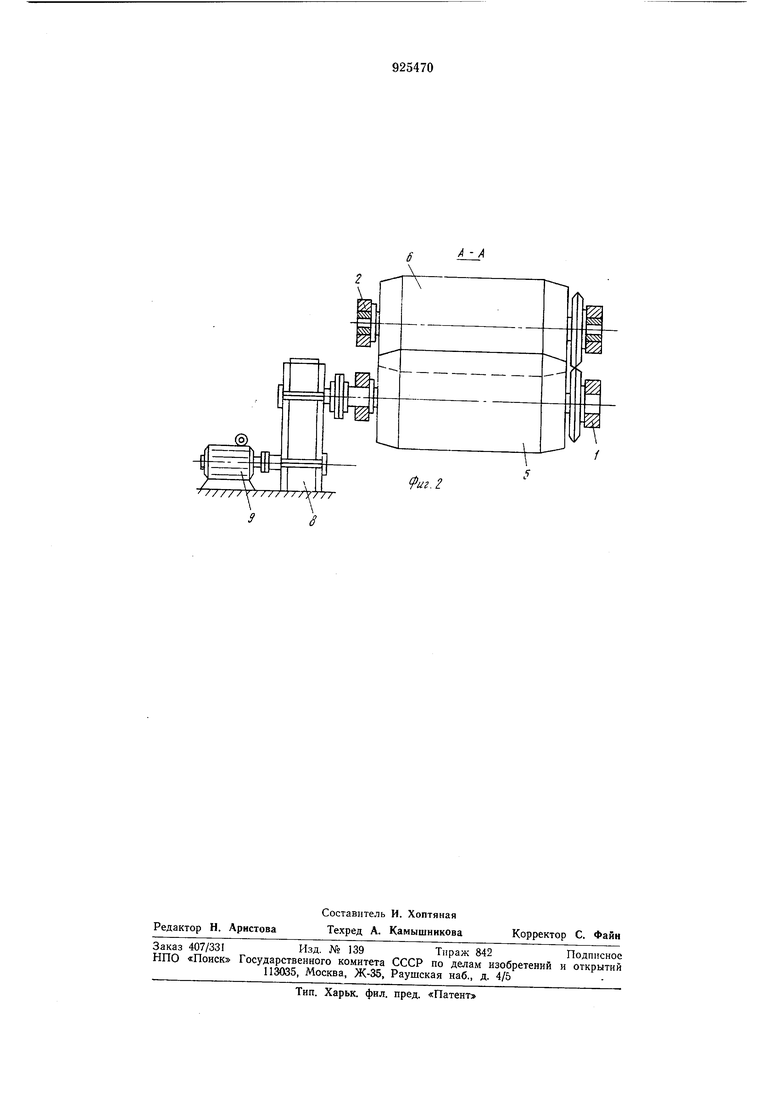
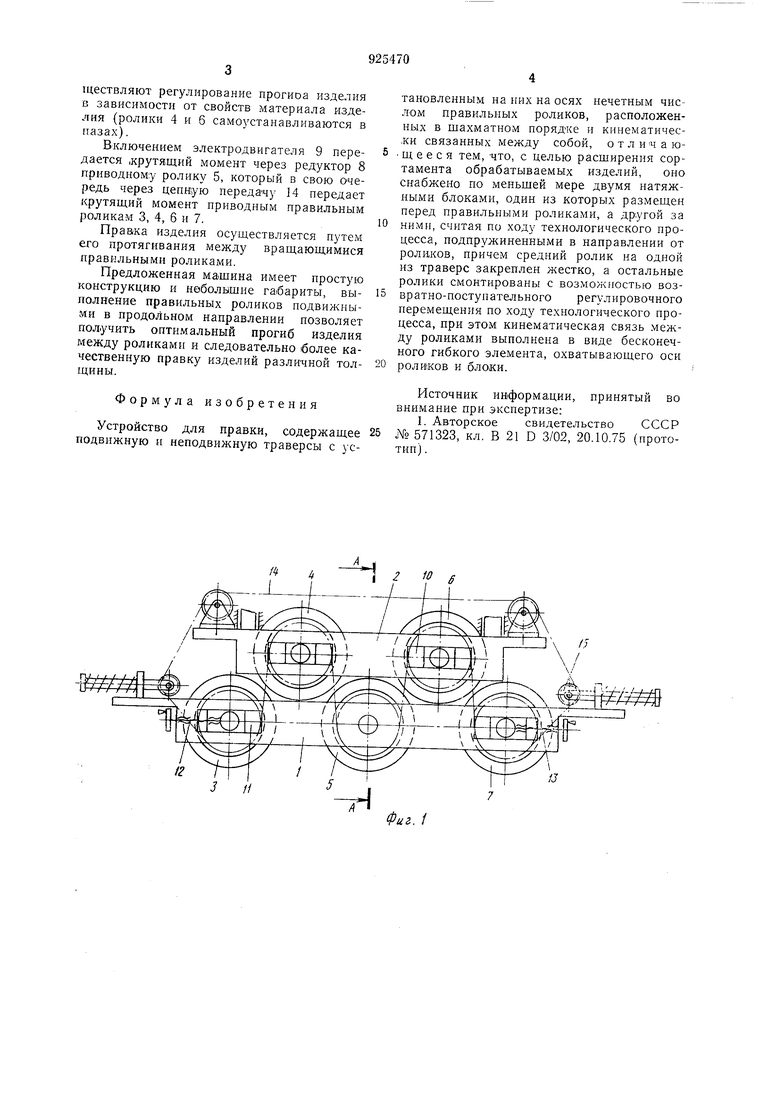
Изобретение относится к области обработки металлов давлением и предназначено преимущественно для нравки листовых изделий. Известно устройство для правки, содержащее подвижную и неподвижную траверсы с установленными на них на осях правильными роликами, расположенными в шахматном порядке и кинематически связанными между собой {1. Недостаток известного устройства заключается в том, что оно позволяет обрабатывать недостаточно щирокий сортамент изделий. Целью изобретения 1является расширение сортамента обрабатываемых изделий. Цель достигается за счет того, -что устройство, содержащее две траверсы с правильными роликами, снабжено по меньшей мере двумя натяжными блоками, размещенными перед правильными роликами и за ними, считая по ходу технологического процесса, и подпружиненными в направлении от роликов, причем средний ролик на одной из траверс закреплен жестко, а остальные ролики смонтированы с возможностью возвратно-поступательного регулировочного перемещения по ходу технологического процесса, при этом кинематическая связь между роликами выполнена в виде бесконечного гибкого элемента, охватывающего оси роликов и блоки. На фиг. 1 схематично изображена предложенная машина; на фиг. 2-разрез А-А на (фиг. 1. Машина содержит неподвижную траверсу 1 и подвижную траверсу 2, на которых в шахматном порядке установлены приводные правильные ролики 3,. 4, 5, 6 и 7. Правильный ролик 5 установлен на траверсе 1 неподвижно относительно нее и посредством редуктора 8 связан с электродвигателем 9. Правильные ролики 4 и 6 установлены в продольных пазах 10 траверсы 2, а ролики 3 и 7 - в продольных пазах 11 траверсы 1 и связаны с винтовымн приводами 12 и 13 их перемещения по пазам. Все правильные ролики связаны мехчду собой кинематически, например, с помощью цепной передачи 14 с подпружиненными блоками 15. Машина работает следующим образом. Перед включением электродвигателя 9 траверсу 2 неремещают в вертикальной плоскости на величину, обеспечивающую зазор между роликами, необходимый для правки изделий данной толщ,ины. Затем перемещением правильных роликов 3 и 7 в пазах 11 винтовыми приводами 12 и 13 осуществляют регулирование прогноз изделия в зависимости от свойств материала изделия (ролики 4 и б самоустанавливаются в пазах).
Включением электродвигателя 9 передается .крутящий момент через редуктор 8 приводному ролику 5, который в свою очередь через цепную передачу И передает крутящий момент приводным правильным роликам 3, 4, 6 и 7.
Правка изделия осуществляется путем его протягивания между вращающимися правильными роликами.
Предложенная машина имеет простую конструкцию и небольшие га бариты, вылолнение правильных роликов подвижными в продольном направлении позволяет пол.учить оптимальный прогиб изделия между роликами и следовательно более качественную правку изделий различной толщины.
Формула изобретения
Устройство для правки, содержащее подвижную и неподвижную траверсы с установленным на них на осях нечетным числом правильных роликов, расположенных в шахматном порядке и кинематичес,ки связанных между собой, о т л и ч а ю. щ е е с я тем, что, с целью расширения сортамента обрабатываемых изделий, оно снабжено по меньшей мере двумя натяжными блоками, один из которых размещен перед правильными роликами, а другой за ними, считая по ходу технологического процесса, подпружиненными в направлении от роликов, причем средний ролик на одной из траверс закреплен жестко, а остальные ролики смонтированы с возможностью возвратно-поступательного регулировочного перемещения по ходу технологического процесса, при этом кинематическая связь между роликами выполнена в виде бесконечного гибкого элемента, охватывающего оси ролижов и блоки.
Источник информации, принятый во внимание при экспертизе:
А -А
