Предлагается механизм движения шагающего экскаватора, илгеющего подт ем 1о-ог1ускную центральную опору и гусеницы. Отличительной особенностью его является применение взаимно подвижных цилиндров и помещенных в них поршней со штоками для перемещения гусениц и центральной оиоры с устройством для свободного хода цилиндра, а также наличие вспо1могательных вертика.чыпях цилиндров, сл жащих для свободного хода цилиндров, укрепленных на их конце.
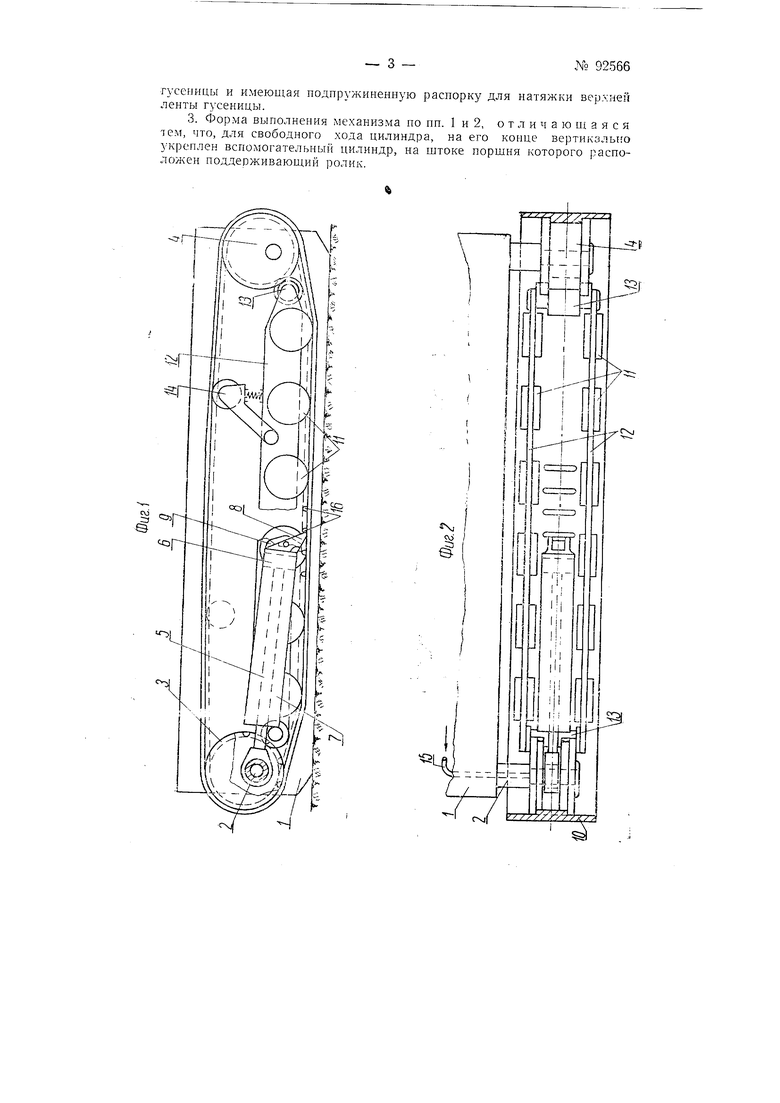
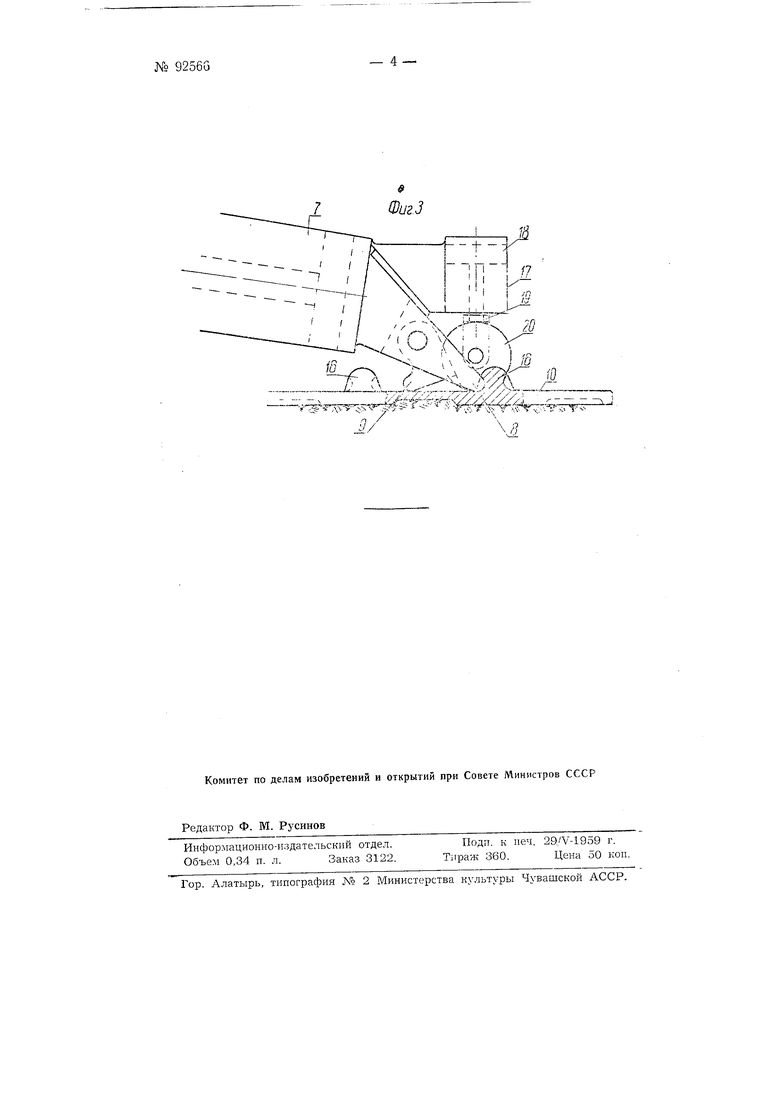
На фиг. 1 изображен механизм движения шагающего экскаватора, вид сбоку; на фиг. 2-то же, вид сверху и на фиг. 3-узел конца подвижного и вспомогательного цилиндров.
В предлагаемом механизме центральная опора 1 экскаватора имеет прямоугольную форму; к центральной опоре присоединены цапфш2,, на которые насажены свободно эксцентриковые основные катки 3 и 4. К цанфе 2 присоединен шток 5, соедипенный с порптнем 6 цилиндра /, заканчивающегося упо)ом 8. В вилке упора помешен рычаг 9. На основные катки 3 и 4 надета гусеница 10, на кижне/ внутренней поверхности гусеницы расположен ; направляющие ролики 11, вра цающиеся свободно в направля оншх рамы 12; на концах ралил свободно посажен распорн,е ролики 13, которые все время прижат, к основп з.м каткам 3 и 4, и роликов 13 л аксимально цриближе ы к центру катков (на фиг. 1 они значител)Но удален от действительного положе 1ия). Таким образом нижняя ветвь гусениц прини.мает положение по направляюВ1ИМ роликам //, а верхняя ветвь гусеницы натягиВ1ается натяжным устpoiicTBOM М, состоящим из подпружиненной раенорки.
Действие механизма шагания заключается в следуюпгем. На фиг. 1 гусеница показа 1а в:нринод ятом положении. Опора экскаватора опирается на поверхность земли. В центральной опоре располагается эле TDOMOTOp с насосо.м и золотни овь м распределение.м гидроуправления. По трубке 15 поступает масло под д авлением в цилиндр 7 с правой стоpOHii когда цилиндр находится в левом крайнем положении, под давлением давит на шток, котор Й соединен с цапфой 2. Так как опора 1 соприкасается с поверхность о земли, катки 3 и 4 повоКе 92566
рачиваются против часовой стрелки в силу того, что цилиндр 7 своим vnopoM S давит на выстун гребенки /6 гусеницы, в результате чего гусеница начинает перемещаться вправо до тех пор, пока не коснется земли; эксцентричные основные катки 3 н 4, перекатываясь по внутренней новерхности гусеницы, поднимают центральную опору экскаватора и .1енно перемепхают опору вперед до тех пор, пока центральная о:пора не онрется на землю, а гусеница примет положение, указанное на фиг. 1. В это время каток 4 приблизится к цилиндру 7, норшень находится в левом крайнем положении. Для совершения второго тага экскаватора цилиндр должен притти в левое крайнее положение, т. е. приблизиться к катку ; с этой целью масло под давлением поступает с левой стороны порш,1я; одновременно жидкость под давлением поступает в укрепленный па конце цилиндра 7 вертикальный вспомогательный цилиндр 17 сверху поршня 18. Поршень давит па шток 19, на концах вилки которого находятся ролики 20; упираясь в нанравляюц1,ие гусеницы, ЦИЛ1ИН1ДР 7 приподнимается, упор 8 поднимается выше выступов гребенки 16 гусеницы и цилиндр 7 беспрепятственно перекатывается на роликах 20 в левое крайнее ноложепие для совершения вперед следующего хода экскаватора.
Для изменения направления движения экскаватора влево, вправо, назад и враш,ения оноры на месте, процесс происходит следующим образом.
Например, для вращения влево-цилиндр 7 приподнимается с помощью цилпндра 17. С правой стороны поршня б поступает давление. Цилиндр, будучи приподнятым, свободно перекатывается па роликах 20 в правое крайнее положение, давление в цилиндре 17 выключают, цилиндр 7 своим упором 8 садится п,а гусеницу.
11роцесс вращения влево совершается так. В цилиндр правой гусеницы с правой стороны поршня поступает давление, а в цилиндр левой гусеницы поступает давление с левой стороны поршня. Правая гусеница движется вперед, а левая-назад, вследствие того, что упор 9 упирается в гребенку 16 гусеницы и гусеница начинает движение назад, когда центральная опора будет приподнята, центральная опора повернется вокруг центра симметрии на некоторый угол. Таким образом экскаватору можно аать иужное паправлепие перадвижеиия.
Преимущества описанного экскаватора заключается в следующем:
1.При передвижении экскаватор сохрапяет горизонтальное положение, приподнимаясь плавно на высоту двойного эксцентрицитета основных катков и плавно опускается центральной опорой на землю.
2.При работе экскаватора гуееницы могут быть прижаты к земле для увеличения устойчивости при экскавации и уменьшения удельного давления на грунт.
3.Простота устройства механизма.
4.Уменьшение мощности для передвижения экскаватора.
Предмет изобретения
1.Мехаиизм движения щаТающего экскаватора, имеющего подъемпо-опускпую центральную опору и гусеницы, о т л и ч а ю пл, и и с я тем, что для попеременного перемещения и подъема гусениц и центральной опоры применены с каждой стороны экскаватора взаимно подвижные цилиндры с упорами в гребепку гусениц и помещенные в них поршни со штоками, соедипенпыми с эксцентриками основных катков, укрепленных на центральной опоре.
2.Форма выполнения механизма но п. 1, о т л и ч а ю щ а я с я тем, что, для усиления прижимания гусениц к земле и поднимания центральной оноры, применена распорно-прижимная рама с прижимными и распорными роликами, помещенная между основными катками и лeнтa tя
гусеницы и имеющая подпружиненную распорку для натяжки верхней ленты гусеницы.
3. Форма выполнения механизма по пп. 1 и 2, отличающаяся тем, что, для свободного хода цилиндра, на его конце вертикально укреплен вспомогательный цилиндр, на штоке поршня которого расположен поддерживающий ролик.
|
тя - ; fB
.-4:/- 5 v ikici xiJ
. I
L.,.,
n 
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм передвижения шагающего экскаватора с гидравлическим приводом | 1949 |
|
SU86079A1 |
| Гидравлический навешиваемый на гусеничный трактор ходоуменьшитель | 1960 |
|
SU143664A1 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| АВТОПОДАТЧИК ДЛЯ БУРИЛЬНЫХ МАШИН | 1971 |
|
SU320609A1 |
| Использование вида с верхней точки для калибровки блока регулирования уклона | 2020 |
|
RU2765070C2 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| БОЛОТОХОДНАЯ ШАГАЮЩАЯ МАШИНА | 2023 |
|
RU2809311C1 |
| Устройство для проходки траншей | 1987 |
|
SU1479579A1 |
| Способ повышения проходимости гусеничного транспортного средства и гусеничное транспортное средство для его осуществления | 1988 |
|
SU1523454A1 |
| ШАГАЮЩАЯ УСТАНОВКА ДЛЯ ВЗЯТИЯ ПРОБ СО ДНА МОРЕЙ И ОКЕАНОВ | 1994 |
|
RU2087718C1 |