него средства. При маневрировании средства непрерывно поворачивают в зоне опорной поверхности правые и левые полутраки 22 и 23 траков гусеничных тележек относительно продоль- ньпс осей - при входе в контакт с несущим основанием - в сторону центра поворота, далее от начала опорной поверхности до середины ее - в противоположную сторону, изменяя затем направление вращения в сторону центра поворота так, что равнодействующая эпюры давления оги.бает центр поворота транспортного средства.Для достижения указанного способа гусеничное транспортное средство оснаще
но направляющими 12 и 14, подвижными взаимодействующими с опорными роликами двуплечими рычагами 25 и 26, взаимосвязанными с полутраками 22 и 23 посредством упругих элементов, и неподвижными взаимодействующими с опорными роликами гусеничных цепей. Каждая из подвижных направляющих состоит из двух шарнирно соединенных частей и установлена rta штоках трех гидроцилиндров с системой управления, обеспечивающей при маневрировании средства равнонаправленное перемещение штоков гидроцилиндров каждой ходовой тележки. 2 с.п.ф-лы, 7 ил.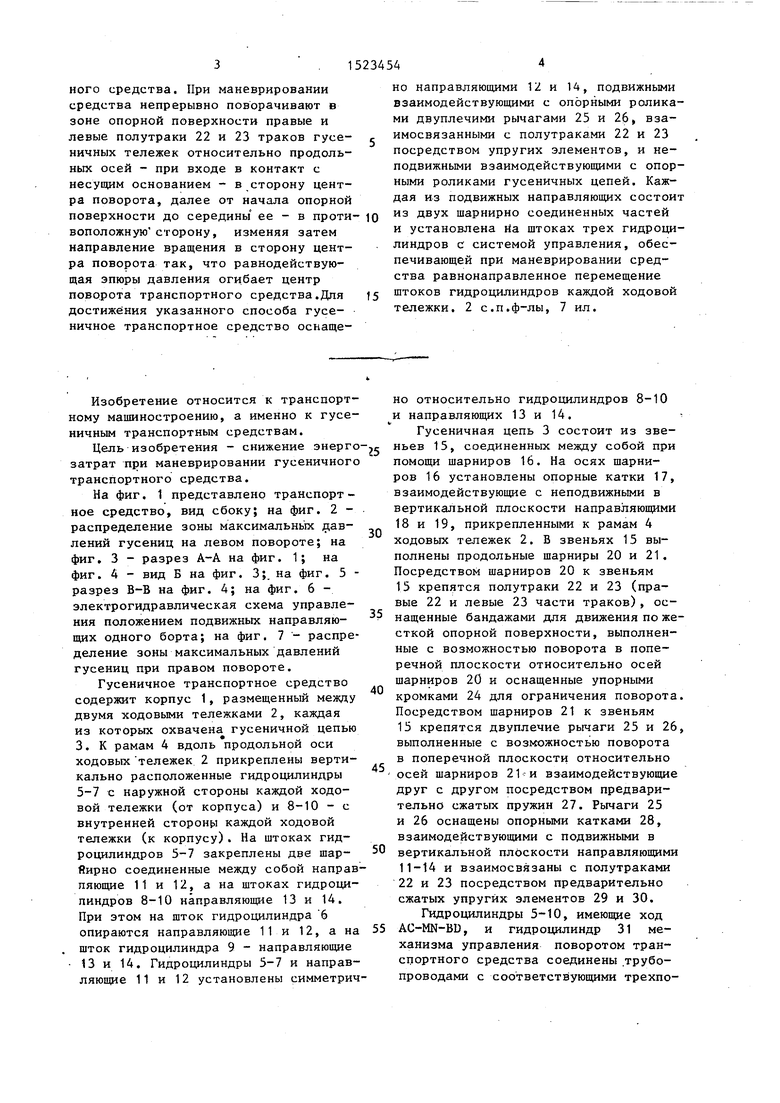
| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничное транспортное средство | 1984 |
|
SU1253870A1 |
| Гусеничное транспортное средство | 1984 |
|
SU1221013A1 |
| Гусеничное транспортное средство | 1984 |
|
SU1232554A1 |
| Гусеничное транспортное средство | 1986 |
|
SU1409516A1 |
| Гусеничное транспортное средство | 1984 |
|
SU1266784A1 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2013275C1 |
| Ходовая часть гусеничного транспортного средства | 1986 |
|
SU1409515A1 |
| Устройство для натяжения гусеничной цепи транспортного средства | 1982 |
|
SU1024347A1 |
| СПОСОБ ПОВЫШЕНИЯ ПОДВИЖНОСТИ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТАХ С ВЫСОКОЙ АДГЕЗИЕЙ И САМОХОДНОЕ ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2028242C1 |
| Устройство для натяжения гусеницы транспортного средства | 1981 |
|
SU982958A1 |
Изобретение относится к транспортному машиностроению, преимущественно к транспортным средствам повышенной проходимости. Цель изобретения - снижение энергозатрат при маневрировании гусеничного транспортного средства. При маневрировании средства непрерывно поворачивают в зоне опорной поверхности правые и левые полутраки 22 и 23 траков гусеничных тележек относительно продольных осей - при входе в контакт с несущим основанием - в сторону центра поворота, далее от начала опорной поверхности до середины ее - в противоположную сторону, изменяя затем направление вращения в сторону центра поворота так, что равнодействующая эпюры давления огибает центр поворота транспортного средства. Для достижения указанного способа гусеничное транспортное средство оснащено направляющими 12 и 14, подвижными взаимодействующими с опорными роликами двуплечими рычагами 25 и 26, взаимосвязанными с полутраками 22 и 23 посредством упругих элементов, и неподвижными взаимодействующими с опорными роликами гусеничных цепей. Каждая из подвижных направляющих состоит из двух шарнирно соединенных частей и установлена на штоках трех гидроцилиндров с системой управления, обеспечивающей при маневрировании средства равнонаправленное перемещение штоков гидроцилиндров каждой ходовой тележки. 2 с.п. ф -лы. 7 ил.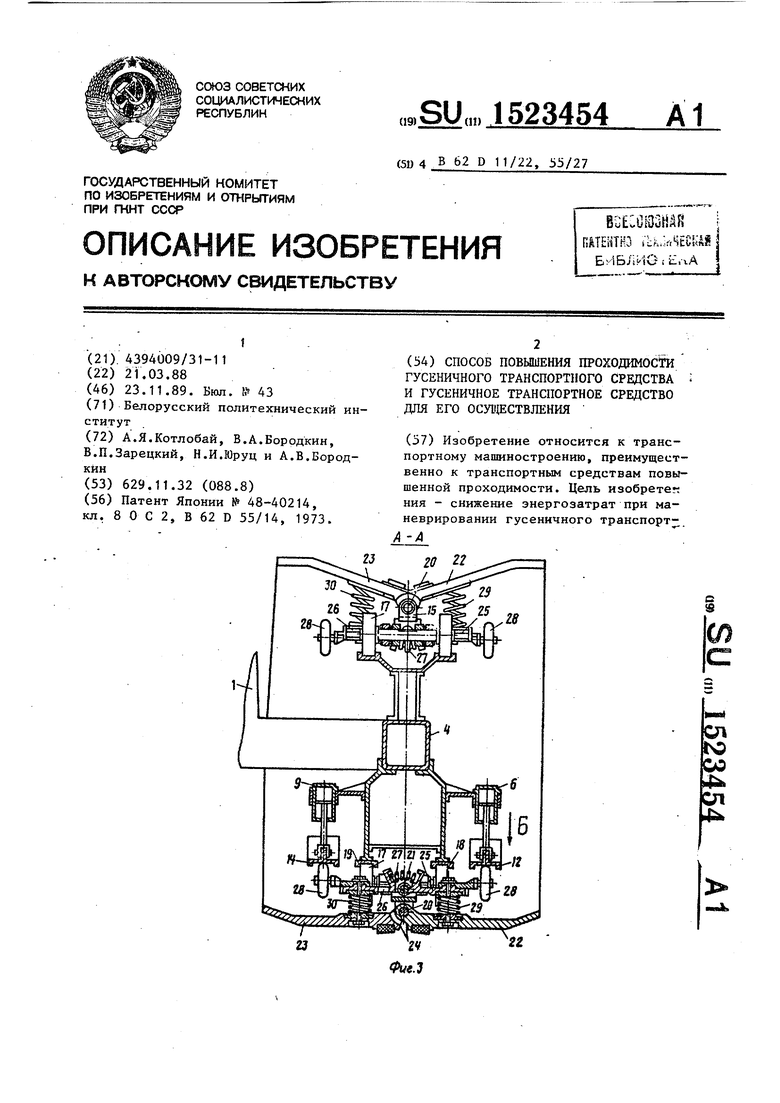
Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам.
Цель изобретения - снижение энергозатрат при маневрировании гусеничного транспортного средства.
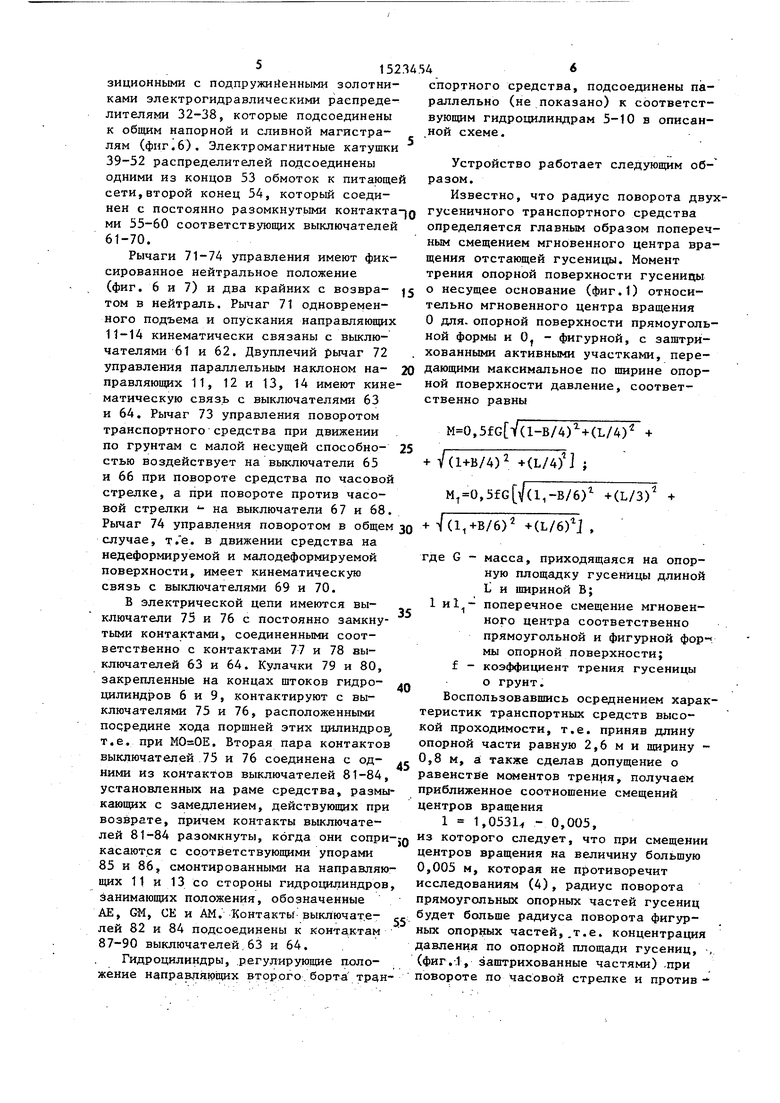
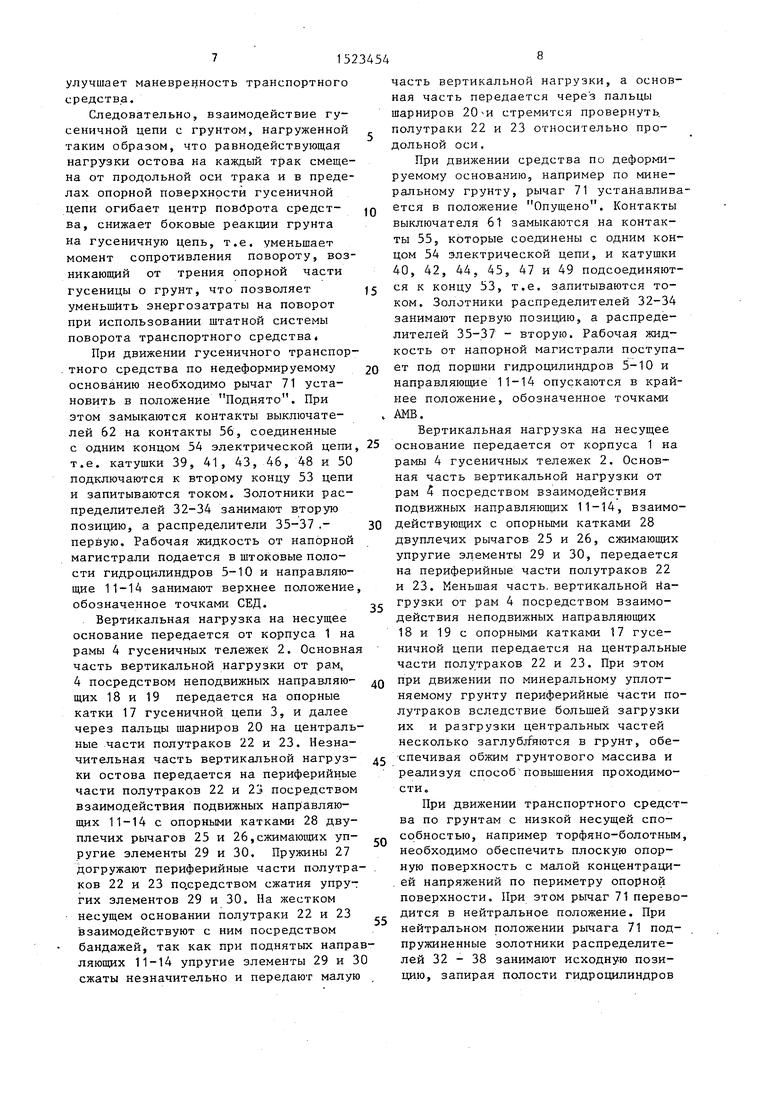
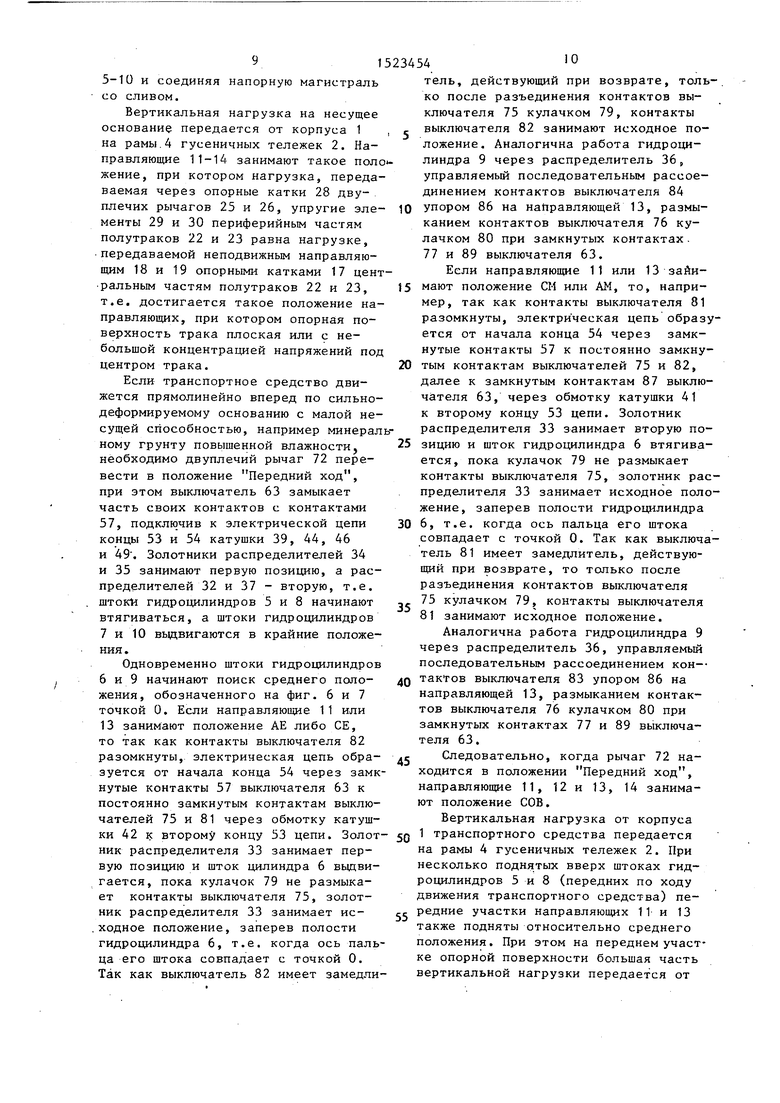
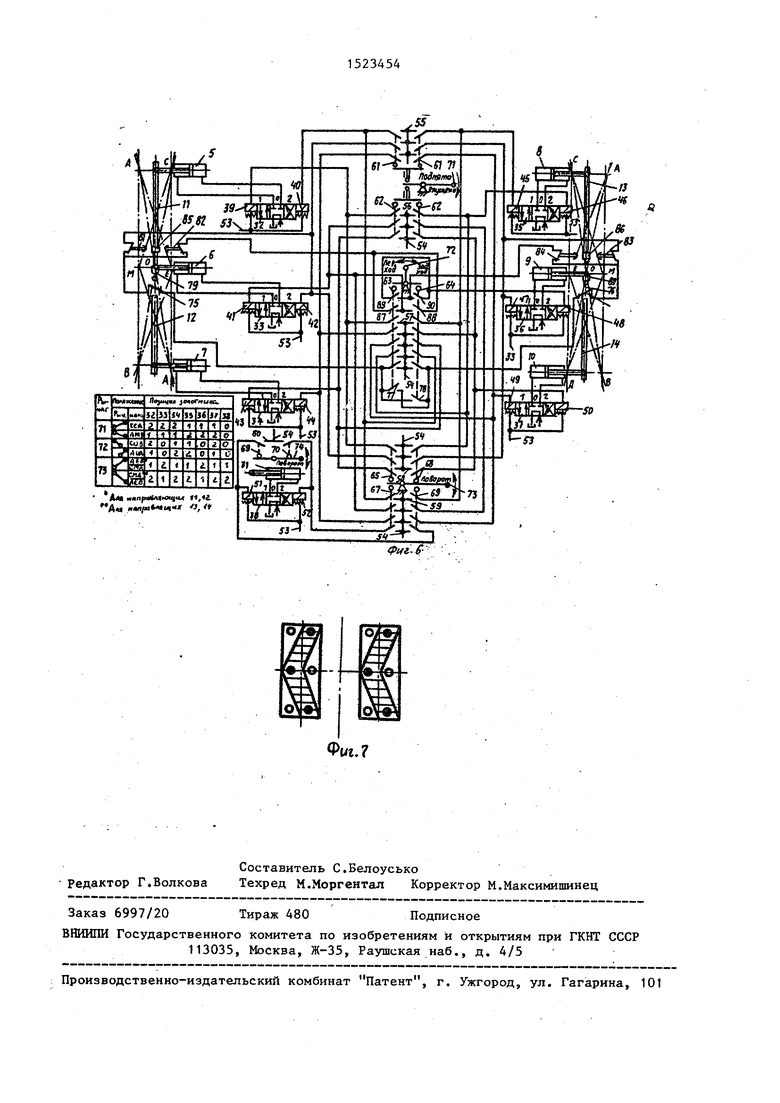
На фиг. 1 представлено транспортное средство, вид сбоку; на фиг. 2 - распределение зоны максимальных давлений гусениц на левом повороте; на фиг, 3 - разрез А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 3;. на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - электрогидравлическая схема управления положением подвижных направляющих одного борта; на фиг. 7 - распределение зоны максимальных давлений гусениц при правом повороте.
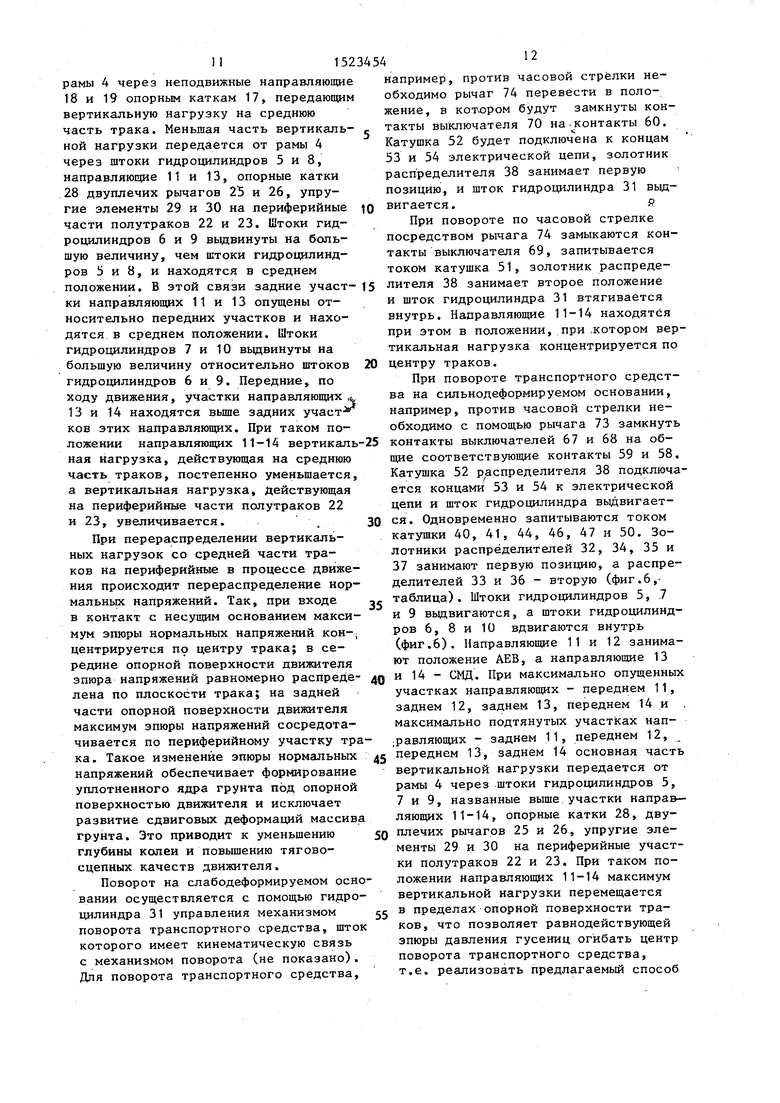
Гусеничное транспортное средство содержит корпус 1, размещенный между двумя ходовыми тележками 2, каждая из которых охвачена гусеничной цепью 3. К рамам 4 вдоль продольной оси ходовых тележек 2 прикреплены вертикально расположенные гидроцилиндры 5-7 с наружной стороны каждой ходовой тележки (от корпуса) и 8-10 - с внутренней стороны каждой ходовой тележки (к корпусу). На штоках гидроцилиндров 5-7 закреплены две шар- Яирно соединенные между собой направляющие 11 и 12, а на штоках гидроцилиндров 8-10 направляющие 13 и 14. При этом на шток гидроцилиндра 6 опираются направляющее 11 и 12, а на шток гидроцилиндра 9 - направляющие 13 и 14. Гидроцилиндры 5-7 и направляющие 11 и 12 установлены симметрич
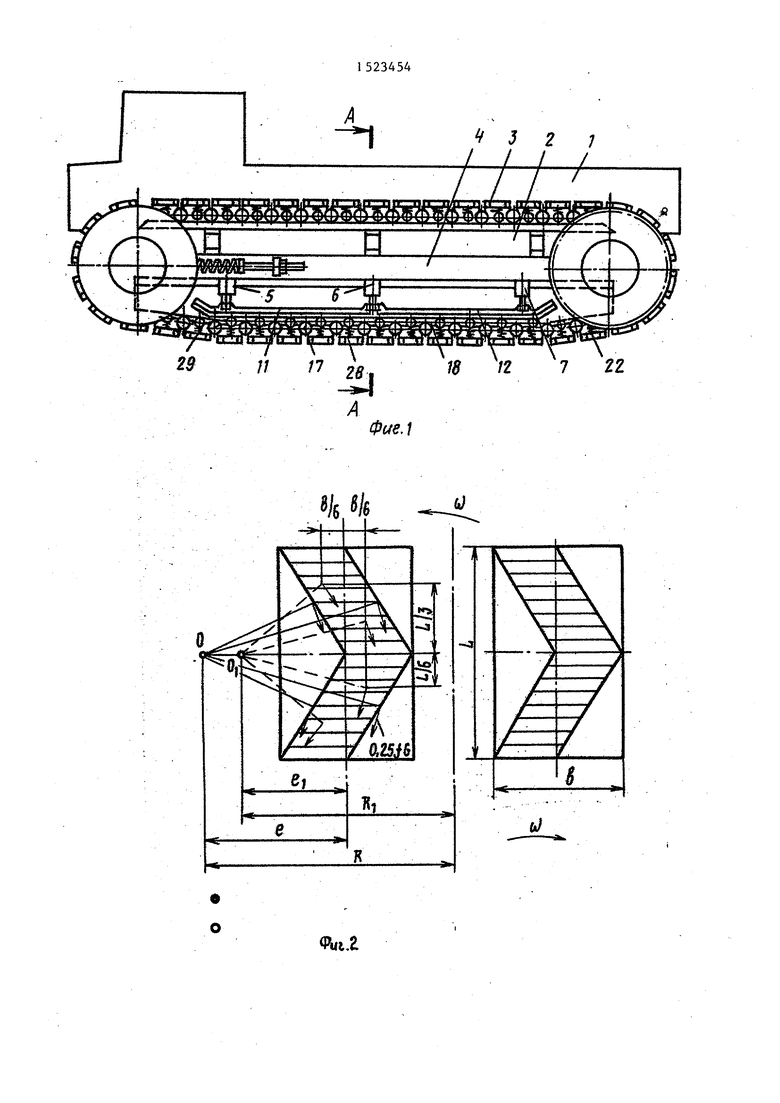
но относительно гидроцилиндров 8-10 и направляющих 13 и 14.Гусеничная цепь 3 состоит из звеньев 15, соединенных между собой при помощи шарниров 16. На осях шарниров 16 установлены опорные катки 17, взаимодействующие с неподвижными в вертикальной плоскости направляющими 18 и 19, прикрепленными к рамам 4 ходовых тележек 2. Б звеньях 15 выполнены продольные шарниры 20 и 21. Посредством шарниров 20 к звеньям 15 крепятся полутраки 22 и 23 (правые 22 и левые 23 части траков), оснащенные бандажами для движения по жесткой опорной поверхности, выполненные с возможностью поворота в поперечной плоскости относительно осей шарниров 20 и оснащенные упорными кромками 24 для ограничения поворота. Посредством шарниров 21 к звеньям 15 крепятся двуплечие рычаги 25 и 26, выполненные с возможностью поворота в поперечной плоскости относительно осей шарниров 21-и взаимодействующие друг с другом посредством предварительно сжатых пружин 27. Рычаги 25 и 26 оснащены опорными катками 28, взаимодействующими с подвижными в
вертикальной плоскости направляющими 11-14 и взаимосвязаны с полутраками 22 и 23 посредством предварительно сжатых упругих элементов 29 и 30. Гидроцилиндры 5-10, имеющие ход
AC-MN-BD, и гидроцилиндр 31 механизма управления поворотом транспортного средства соединены .трубопроводами с соответствующими трехпо
зиционными с подпружиненными золотниками электрогидравлическими раепреде- лителями 32-38, которые подсоединены к общим напорной и сливной магистралям (фиг.6). Электромагнитные катушки 39-52 распределителей подсоединены одними из концов 53 обмоток к питающей сети,второй конец 54, который соединен с постоянно разомкнутьми контакта-)0 гусеничного транспортного средства
ми 55-60 соответствующих выключателей 61-70.
Рычаги 71-74 управления имеют фиксированное нейтральное положение (фиг. 6 и 7) и два крайних с возвратом в нейтраль. Рычаг 71 одновременного подъема и опускания направляющих 11-14 кинематически связаны с выклюопределяется главным образом попере ным смещением мгновенного центра вр щения отстающей гусеницы. Момент трения опорной поверхности гусеницы 15 о несущее основание (фиг.1) относительно мгновенного центра вращения О для. опорной поверхности прямоугол ной формы и О, - фигурной, с заштри хованными активными участками, пере
определяется главным образом попереч ным смещением мгновенного центра вра щения отстающей гусеницы. Момент трения опорной поверхности гусеницы 15 о несущее основание (фиг.1) относительно мгновенного центра вращения О для. опорной поверхности прямоугольной формы и О, - фигурной, с заштрихованными активными участками, перественно равны
чателями 61 и 62. Двуплечий рычаг 72 управления параллельным наклоном на- 20 дающими максимальное по ширине опор- правляющих 11, 12 и 13, 14 имеют кине- ной поверхности давление, соответ- матическую связь с выключателями 63 и 64. Рычаг 73 управления поворотом транспортного средства при движении по грунтам с малой несущей способно- 25 стью воздействует на выключатели 65 и 66 при повороте средства по часовой стрелке, а при повороте против часовой стрелки - на выключатели 67 и 68. .
Рычаг 74 управления поворотом в общем зо Т((1,+В/6) +(L/6) J ,
,(l-B/4)+(L/4) + + V(l+B/4)2 +(L/4) ;
,(l,-B/6) -t-(L/3)
случае, т.е. в движении средства на недеформируемой и малодеформируемой поверхности, имеет кинематическую связь с выключателями 69 и 70.
В электрической цепи имеются выключатели 75 и 76 с постоянно замкнутыми контактами, соединенными соответственно с контактами 77 и 78 выключателей 63 и 64. Кулачки 79 и 80, закрепленные на концах штоков гидроцилиндров 6 и 9, контактируют с выключателями 75 и 76, расположенными порредине хода поршней этих цилиндров т.е. при . Вторая пара контактов выключателей 75 и 76 соединена с одними из контактов выключателей 81-84, установленных на раме средства, размыкающих с замедлением, действующих при возврате, причем контакты выключате35
40
45
где G - масса, приходящаяся на опорную площадку гусеницы длиной li и шириной В;
1 поперечное смещение мгновенного центра соответственно прямоугольной и фигурной фор- мы опорной поверхности; - коэффициент трения гусеницы
о грунт.
Воспользовавшись осреднением характеристик транспортных средств высокой проходимости, т.е. приняв длину опорной части равную 2,6 м и щирину - 0,8 м, 3L также сделав допущение о равенств е мсжентов трения, получаем приближенное соотношение смещений центров вращения
1 1,053U - 0,005, лей 81-84 разомкнуты, когда они сопри-JQ из которого следует, что при смещении касаются с соответствующими упорами центров вращения на величину большую 85 и 86, смонтированными на направляющих 11 и 13 со стороны гидроцилиндров, занимающих положения, обозначенные АЕ, GM, СЕ и AM. Контакты выключат.е- „ будет больше радиуса поворота фигур- лей 82 и 84 подсоединены к контактам ных опорных частей,,т.е. концентрация 87-90 выключателей.63 и 64. . давления по опорной площади гусениц, -,
Гидроцилиндры, .регулирующие шэло- , (фиг,-.1, заштрихованные частями) .при жение направляющих второго.борта тран- повороте по часовой стрелке и против0,005 м, которая не противоречит исследованиям (4), радиус поворота прямоугольных опорных частей гусениц
спортного средства, подсоединены параллельно (не показано) к соответствующим гидроцилиндрам 5-10 в описан- ,ной схеме.
Устройство работает следующим образом.
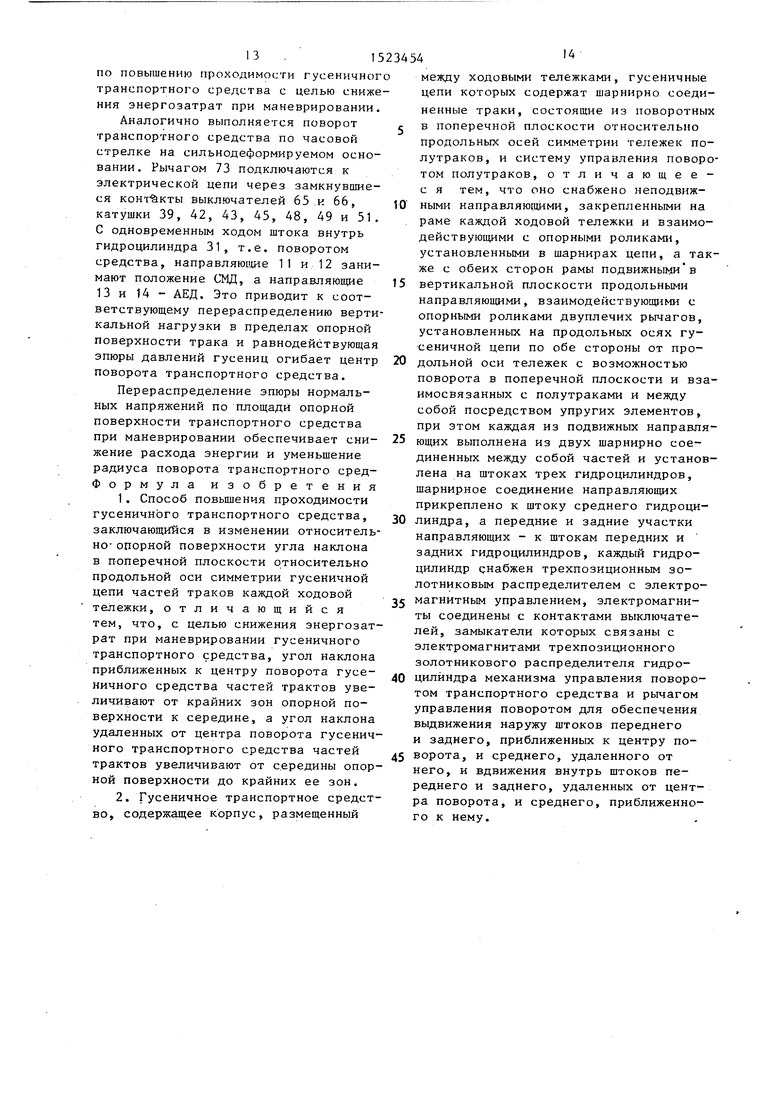
Известно, что радиус поворота двухгусеничного транспортного средства
определяется главным образом поперечным смещением мгновенного центра вращения отстающей гусеницы. Момент трения опорной поверхности гусеницы о несущее основание (фиг.1) относительно мгновенного центра вращения О для. опорной поверхности прямоугольной формы и О, - фигурной, с заштрихованными активными участками, передающими максимальное по ширине опор- ной поверхности давление, соответ- .
ственно равны
дающими максим ной поверхност .
дающими максимальное по ширине ной поверхности давление, соот .
,(l-B/4)+(L/4) + + V(l+B/4)2 +(L/4) ;
,(l,-B/6) -t-(L/3)
5
0
5
где G - масса, приходящаяся на опорную площадку гусеницы длиной li и шириной В;
1 поперечное смещение мгновенного центра соответственно прямоугольной и фигурной фор- мы опорной поверхности; - коэффициент трения гусеницы
о грунт.
Воспользовавшись осреднением характеристик транспортных средств высокой проходимости, т.е. приняв длину опорной части равную 2,6 м и щирину - 0,8 м, 3L также сделав допущение о равенств е мсжентов трения, получаем приближенное соотношение смещений центров вращения
1 1,053U - 0,005, из которого следует, что при смещении центров вращения на величину большую будет больше радиуса поворота фигур- ных опорных частей,,т.е. концентрация давления по опорной площади гусениц,
0,005 м, которая не противоречит исследованиям (4), радиус поворота прямоугольных опорных частей гусениц
улучшает маневрег ность транспортного редства.
Следовательно, взаимодействие гуеничной цепи с грунтом, нагруженной аким образом, что равнодействующая нагрузки остова на каждый трак смещеа от продольной оси трака и в предеах опорной поверхности гусеничной епи огибает центр поворота средст- Q а, снижает боковые реакции грунта а гусеничную цепь, т.е. уменьшает омент сопротивления повороту, возникающий от трения опорной части гусеницы о грунт, что позволяет 15 уменьшить энергозатраты на поворот при использовании штатной системы поворота транспортного средства 4
При движении гусеничного транспор- тного средства по недеформируемому 20 основанию необходимо рычаг 71 установить в положение Поднято. При этом замыкаются контакты выключате- лей 62 на контакты 56, соединенные с одним концом 54 электрической цепи, 25 т.е. катушки 39, 41, 43, 46, 48 и 50 подключаются к второму концу 53 цепи и запитываются током. Золотники распределителей 32-34 занимают вторую позицию, а распределители 35-37 .- 30 первую. Рабочая жидкость от напорной магистрали подается в штоковые полости гидроцилиндров 5-10 и направляющие 11-14 занимают верхнее положение, обозначенное точками СЕД.25
Вертикальная нагрузка на несущее основание передается от корпуса 1 на рамы 4 гусеничных тележек 2. Основная часть вертикальной нагрузки от рам, 4 посредством неподвижных направляю- Q щих 18 и 19 передается на опорные катки 17 гусеничной цепи 3, и далее через пальцы шарниров 20 на центральные части полутраков 22 и 23. Незначительная часть вертикальной нагруз- 45 ки остова передается на периферийные части полутраков 22 и 23 посредством взаимодействия подвижных направляющих 11-14 с опорными катками 28 двуплечих рычагов 25 и 26,сжимающих уп- п ругие элементы 29 и 30. Пружины 27 догружают периферийные части полутра- . ков 22 и 23 по.средством сжатия упругих элементов 29 и 30. На жестком несущем основании полутраки 22 и 23 взаимодействуют с ним посредством бандажей, так как при поднятых направляющих 11-14 упругие элементы 29 и 30 сжаты незначительно и передают малую
55
5 п
5
часть вертикальной нагрузки, а основная часть передается через пальцы щарниров 20 и стремится провернуть, полутраки 22 и 23 относительно продольной оси.
При движении средства по деформируемому основанию, например по минеральному грунту, рычаг 71 устанавливается в положение Опущено. Контакты выключателя 6t замыкаются на контакты 55, которые соединены с одним концом 54 электрической цепи, и катушки 40, 42, 44, 45, 47 и 49 подсоединяются к концу 53, т.е. запитываются током. Золотники распределителей 32-34 занимают первую позицию, а распределителей 35-37 - BTOpyfo. Рабочая жидкость от напорной магистрали поступает под поршни гидроцилиндров 5-10 и направляющие 11-14 опускаются в крайнее положение, обозначенное точками АМВ.
Вертикальная нагрузка на несущее основание передается от корпуса 1 на рамы 4 гусеничных тележек 2. Основная часть вертикальной нагрузки от рам 4 посредством взаимодействия подвижных направляюш 1х 11-14, взаимодействующих с опорными катками 28 двуплечих рычагов 25 и 26, сжимающих упругие элементы 29 и 30, передается на периферийные части полутраков 22 и 23. Меньшая часть, вертикальной Нагрузки от рам 4 посредством взаимодействия неподвижных направляющих 18 и 19 с опорными катками 17 гусеничной цепи передается на центральные части полутраков 22 и 23. При этом при движении по минеральному уплотняемому грунту периферийные части полутраков вследствие большей загрузки их и разгрузки центральньк частей несколько заглуб йются в грунт, обеспечивая обжим грунтового массива и реализуя способ повышения проходимости.
При движении транспортного средства по грунтам с низкой несущей способностью, например торфяно-болотным, необходимо обеспечить плоскую опорную поверхность с малой концентраци- . ей напряжений по периметру опорной поверхности. При этом рычаг 71 переводится в нейтральное положение. При нейтральном положении рычага 71 подпружиненные золотники распределителей 32 - 38 занимают исходную позицию, запирая полости гидроцилиндров
5-10 и соединяя напорную магистраль со сливом.
Вертикальная нагрузка на несущее основание передается от корпуса 1 на рамы.4 гусеничных тележек 2. Направляющие 11-14 занимают такое поло жение, при котором нагрузка, передаваемая через опорные катки 28 двуплечих рычагов 25 и 26, упругие элементы 29 и 30 периферийным частям полутраков 22 и 23 равна нагрузке, передаваемой неподвижным направляющим 18 и 19 опорными катками 17 центральным частям полутраков 22 и 23, т.е. достигается такое положение направляющих, при котором опорная поверхность трака плоская или с не- больщой концентрацией напряжений под центром трака.
Если транспортное средство движется прямолинейно вперед по сильнодеформируемому основанию с малой несущей способностью, например минералному грунту повышенной влажности, необходимо двуплечий рычаг 72 перевести в положение Передний ход, при этом выключатель 63 замыкает часть своих контактов с контактами 57, подключив к электрической цепи концы 53 и 54 катушки 39, 44, 46 и 49. Золотники распределителей 34 и 35 занимают первую позицию, а распределителей 32 и 37 - вторую, т.е. m-roKVi гидроцилиндров 5 и 8 начинают втягиваться, а штоки гидроцилиндров 7 и 10 вьщвигаются в крайние положения .
Одновременно штоки гидроцилиндров 6 и 9 начинают поиск среднего положения, обозначенного на фиг. 6 и 7 точкой 0. Если направляющие 11 или 13 занимают положение АЕ либо СЕ, то так как контакты выключателя 82 разомкнуты, электрическая цепь образуется от начала конца 54 через замкнутые контакты 57 выключателя 63 к постоянно замкнутым контактам выключателей 75 и 81 через обмотку катущ- ки 42 к второму концу 53 цепи. Золотник распределителя 33 занимает первую позицию и шток цилиндра 6 выдвигается, пока кулачок 79 не размыкает контакты выключателя 75, золотник распределителя 33 занимает ис- ,ходное положение, заперев полости гидроцилиндра 6, т.е. когда ось пальца его штока совпадает с точкой 0. Так как выключатель 82 имеет замедли0
0
5
тель, действующий при возврате, только после разъединения контактов выключателя 75 кулачком 79, контакты выключателя 82 занимают исходное положение. Аналогична работа гидроцилиндра 9 через распределитель 36, управляемый последовательным рассоединением контактов выключателя 84 упором 86 на направляющей 13, размыканием контактов выключателя 76 кулачком 80 при замкнутых контактах. 77 и 89 выключателя 63.
Если направляющие 11 или 13 зайи- 5 мают положение СМ или AM, то, например, так как контакты выключателя 81 разомкнуты, электри ческая цепь образуется от начала конца 54 через замкнутые контакты 57 к постоянно замкнутым контактам выключателей 75 и 82, далее к замкнутым контактам 87 выключателя 63, через обмотку катушки 41 к второму концу 53 цепи. Золотник распределителя 33 занимает вторую позицию и шток гидроцилиндра 6 втягивается, пока кулачок 79 не размыкает контакты выключателя 75, золотник распределителя 33 занимает исходное положение, заперев полости гидроцилиндра 6, т.е. когда ось пальца его штока совпадает с точкой 0. Так как выключатель 81 имеет замедлитель, действующий при возврате, то только после разъединения контактов выключателя 75 кулачком 79, контакты выключателя 81 занимают исходное положение.
Аналогична работа гидроцилиндра 9 через распределитель 36, управляемый последовательным рассоединением кон-тактов выключателя 83 упором 86 на направляющей 13, размыканием контактов выключателя 76 кулачком 80 при замкнутых контактах 77 и 89 выключателя 63.
Следовательно, когда рычаг 72 находится в положении Передний ход, направляющие 11, 12 и 13, 14 занимают положение СОВ.
Вертикальная нагрузка от корпуса 1 транспортного средства передается на рамы 4 гусеничных тележек 2. При несколько поднятых вверх штоках гидроцилиндров 5 и 8 (передних по ходу движения транспортного средства) передние участки направляющих 11 и 13 также подняты относительно среднего положения. При этом на переднем участке опорной поверхности большая часть вертикальной нагрузки передается от
0
5
0
5
0
5
рамы 4 через неподвижные направляющие 18 и 19 опорным каткам 17, передающим вертикальную нагрузку на среднюю часть трака. Меньшая часть вертикальной нагрузки передается от рамы 4 через штоки гидроцилиндров 5 и 8, направляющие 11 и 13, опорные катки 28 двуплечих рычагов 25 и 26, упругие элементы 29 и 30 на периферийные части полутраков 22 и 23. Штоки гид- роцилиндров 6 и 9 вьщвинуты на большую величину, чем штоки гидроцилиндров 5 и В, и находятся в среднем
положении. В этой связи задние участ- 15 лителя 38 занимает второе положение
ки направляю11№1Х 11 и 13 опущены относительно передних уча :тков и находятся в среднем положении. Штоки гидроцилиндров 7 и 10 вьщвинуты на большую величину относительно штоков гидроцилиндров 6 и 9. Передние, по ходу движения, участки направляющих 13 и 14 находятся вьш1е задних участ ков этих направляющих. При таком положении направляющих 11-14 вертикаль-25 контакты выключателей 67 и 68 на об- ная нагрузка, действующая на среднюю щие соответствующие контакты 59 и 58,
часть траков, постепенно уменьшается, а вертикальная нагрузка. Действующая на периферийные части полутраков 22 и 23, увеличивается.30
При перераспределении вертикальных нагрузок со средней части траков на периферийные в процессе движения происходит перераспределение нор35
Катушка 52 распределителя 38 подключается концами 53 и 54 к электрической цепи и шток гидроцилиндра выдвигается. Одновременно запитываются током катушки 40, 41, 44, 46, 47 и 50. Золотники распределителей 32, 34, 35 и 37 занимают первую позицию, а распределителей 33 и 36 - вторую (фиг.6,- таблица). Штоки гидроцилиндров 5, 7 и 9 выдвигаются, а штоки гидроцилиндров 6, 8 и 10 вдвигаются внутрь (фиг.6). Направляющие 11 и 12 занимают положение ЛЕВ, а направляющие 13 и 14 - СМД. При максимально опущенньпс участках направляющих - переднем 11, заднем 12, заднем 13, переднем 14 и , максимально подтянутых участках напмальньк напряжений. Так, при входе в контакт с несущим основанием максимум эшоры нормальных напряжений KOH-J центрируется П9 центру трака; в середине опорной поверхности движителя эпюра напряжений равномерно распреде- дО лена по плоскости трака; на задней части опорной поверхности движителя максимум эпюры напряжений сосредотачивается по периферийному участку тра- .равляющих - заднем 11, переднем 12, ка. Такое изменение эпюры нормальных дд переднем 13, заднем 14 основная часть
вертикальной нагрузки передается от рамы 4 через штоки гидроцилиндров 5, 7 и 9, названные выше.участки направляющих 11-14, опорные катки 28, дву- 50 плечих рычагов 25 и 26, упругие элементы 29 и 30 на периферийные участки полутраков 22 и 23. При таком положении направляющих 11-14 максимум вертикальной нагрузки перемещается в пределах опорной поверхности транапряжений обеспечивает формирование уплотненного ядра грунта под опорной поверхностью движителя и исключает развитие сдвиговых деформаций массива грунта. Это приводит к уменьшению глубины колеи и повышению тягово- сцепных качеств движителя.
Поворот на слабодеформируемом основании осуществляется с помощью гидроцилиндра 31 управления механизмом 55
ков, что позволяет равнодействующей эпюры давления гусениц огибать центр поворота транспортного средства, т.е. реализовать предлагаемый способ
поворота транспортного средства, шток которого имеет кинематическую связь с механизмом поворота (не показано). Для поворота транспортного средства.
например, против часовой стрелки необходимо рычаг 74 перевести в положение, в котором будут замкнуты контакты выключателя 70 на-контакты 60. Катушка 52 будет подключена к концам 53 и 54 электрической цепи, золотник распределителя 38 занимает первую позицию, и шток гидроцилиндра 31 выдвигается,и При повороте по часовой стрелке посредством рычага 74 замыкаются контакты выключателя 69, запитывается током катушка 51, золотник распредеи шток гидроцилиндра 31 втягивается внутрь. Направляющие 11-14 находятся при этом в положении, при .котором вертикальная нагрузка концентрируется по центру траков.
При повороте транспортного средства на сильнодеформируемом основании, например, против часовой стрелки необходимо с помощью рычага 73 замкнуть
Катушка 52 распределителя 38 подключается концами 53 и 54 к электрической цепи и шток гидроцилиндра выдвигается. Одновременно запитываются током катушки 40, 41, 44, 46, 47 и 50. Золотники распределителей 32, 34, 35 и 37 занимают первую позицию, а распределителей 33 и 36 - вторую (фиг.6,- таблица). Штоки гидроцилиндров 5, 7 и 9 выдвигаются, а штоки гидроцилиндров 6, 8 и 10 вдвигаются внутрь (фиг.6). Направляющие 11 и 12 занимают положение ЛЕВ, а направляющие 13 и 14 - СМД. При максимально опущенньпс участках направляющих - переднем 11, заднем 12, заднем 13, переднем 14 и , максимально подтянутых участках нап.равляющих - заднем 11, переднем 12, переднем 13, заднем 14 основная часть
ков, что позволяет равнодействующей эпюры давления гусениц огибать центр поворота транспортного средства, т.е. реализовать предлагаемый способ
по повышению проходимости гусеничног транспортного срелства с целью снижения энергозатрат при маневрировании.
Аналогично выполняется поворот транспортного средства по часовой стрелке на сильнодеформируемом основании. Рычагом 73 подключаются к электрической цепи через замкнувшиеся контакты выключателей 65 .и 66, катушки 39, 42, 43, 45, 48, 49 и 51. С одновременным ходом штока внутрь гидроцилиндра 31, т.е. поворотом средства, направляющие 11 и 12 занимают положение СМД, а направляющие 13 и 14 - АЕД. Это приводит к соответствующему перераспределению вертикальной нагрузки в пределах опорной поверхности трака и равнодействующая эпюры давлений гусениц огибает центр поворота транспортного средства.
Перераспределение эпюры нормальных напряжений по площади опорной поверхности транспортного средства при маневрировании обеспечивает снижение расхода энергии и уменьшение радиуса поворота транспортного сред- Формула изобретения
1,Способ повышения проходимости гусеничного транспортного средства, заключающийся в изменении относительно- опорной поверхности угла наклона
в поперечной плоскости относительно продольной оси симметрии гусеничной цепи частей траков каждой ходовой тележки, отличающийся тем, что, с целью снижения энергозатрат при маневрировании гусеничного транспортного средства, угол наклона приближенных к центру поворота гусеничного средства частей трактов увеличивают от крайних зон опорной поверхности к середине, а угол наклона удаленных от центра поворота гусеничного транспортного средства частей трактов увеличивают от середины опорной поверхности до крайних ее зон.
2,Гусеничное транспортное средство, содержащее корпус, размещенный
между ходовыми тележками, гусеничные цепи которых содержат шарнирно соединенные траки, состоящие из поворотных
Б поперечной плоскости относительно продольных осей симметрии тележек полутраков, и систему управления поворотом полутраков, отличающее- с я тем, что оно снабжено неподвижными направляю цими, закрепленными на раме каждой ходовой тележки и взаимодействующими с опорными роликами, установленными в шарнирах цепи, а также с обеих сторон рамы подвижными в
вертикальной плоскости продольными направляющими, взаимодействующими с опорными роликами двуплечих рычагов, установленных на продольных осях гусеничной цепи по обе стороны от продольной оси тележек с возможностью
поворота в поперечной плоскости и взаимосвязанных с полутраками и между собой посредством упругих элементов, при этом каждая из подвижных направляющих выполнена из двух шарнирно соединенных между собой частей и установлена на штоках трех гидроцилиндров, шарнирное соединение направляющих прикреплено к штоку среднего гидроцилиндра, а передние и задние участки направляющих - к штокам передних и задних гидроцилиндров, каждый гидроцилиндр снабжен трехпозиционным золотниковым распределителем с электромагнитным управлением, электромагниты соединены с контактами выключателей, замыкатели которых связаны с электромагнитами трехпозиционного золотникового распределителя гидроцилиндра механизма управления поворотом транспортного средства и рычагом управления поворотом для обеспечения выдвижения наружу штоков переднего и заднего, приближенных к центру поворота, и среднего, удаленного от него, и вдвижения внутрь штоков переднего и заднего, удаленных от центра поворота, и среднего, приближенного к нему.
2В
9 О
Ф1|1.г
2 7
Фие.1
21 27 2В151В 11 В-В
23 2i
2ff
Вид Б
Фиг.
Фие.5
Jkt 4 nfiitvl aai H,tl A-a «lfa« l«- O, «
Фиг. 7
/Л
.f
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
