(5) УСТРОЙСТВО для УПРАВЛЕНИЯ НАМОТКОЙ НИТЕВИДНОГО МАТЕРИАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемоткой длинномерного материала | 1985 |
|
SU1313792A1 |
| Устройство для управления перемоткой длинномерного материала | 1985 |
|
SU1623934A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ | 1996 |
|
RU2101223C1 |
| Устройство для стабилизации натяжения рулонного материала | 1987 |
|
SU1586983A1 |
| Устройство для намотки нитевидного материала в паковку | 1986 |
|
SU1406107A1 |
| Устройство для управления намоткой нитевидного материала | 1982 |
|
SU1096183A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТЕВИДНОГО МАТЕРИАЛА | 1995 |
|
RU2113393C1 |
| Устройство для крестообразной намотки нитевидного материала на сердечник | 1988 |
|
SU1553494A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ | 1997 |
|
RU2118937C1 |
| Устройство для намотки на катушки нитеобразных материалов | 1975 |
|
SU640779A1 |
I
Изобретение относится к области 4 автоматических устройств для управления процессами намотки нитевидных материалов и может быть использовано в текстильных производствах, производствах химических, синтетических и стеклонитей-.
Известно устройство для управления намоткой нитевидного материала, содержащее электродвигатели привода механизма намотки и механизма рас- . кладки нитевидного материала, регу лятор скорости намотки, к выходу которого подключен электродвигатель привода механизма намотки, датчик числа ходов механизма раскладки, включенный на вход сумматора числа ходов, и программный блок, один иэ выходов которого электрически связан с входом регулятора скорости намотки tn.
Недостатком известного устройства является низкая точность управления процессом намотки.
Целью изобретения является повышение точности управления.
Для этого устройство содержит регулятор скорости перемещения механизма раскладки, вход которого электрически связан с другим выходом программного блока, а выход - с электродвигателем механизма раскладки, при этом выход сумматора числ ходов подключен к входу программного блока.
Механизм намотки нитевидного материала размещен на подвижном основании, а механизм раскладки нитевидного материала выполнен в виде кулачкового вала с профилированным пазом причем основание механизма намотки имеет выступ для взаимодействия с профилированным пазом механизма раскладки.
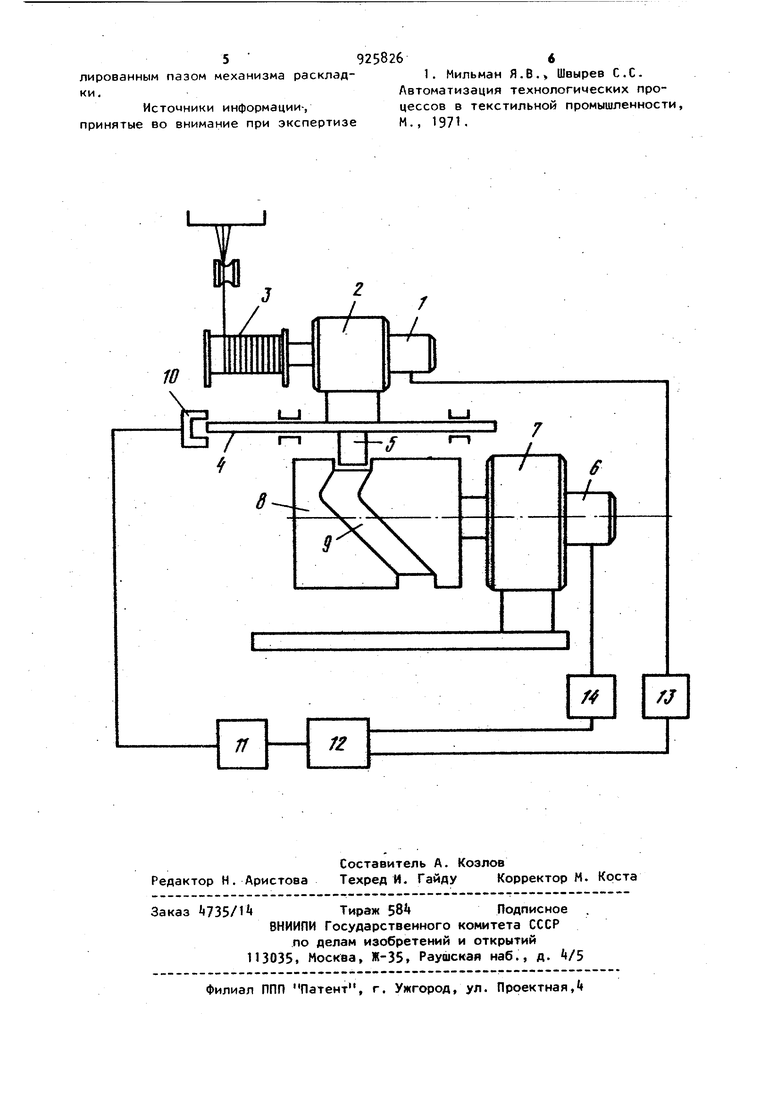
Конструкция и принцип действия устройства поясняется-чертежом.
Устройство для управления намоткой нитевидного материала содержит электродвигатель 1 механизма намотки,, редуктор 2, катушку 3 с наматываемым нитевидным материалом, подвижное основание 4, выступ 5, жестко связанный с подвижным основанием k, электродвигатель 6 механизма рас кладки, редуктор 7, выходной вал 8 с кольцевым профилированным пазом 9, датчик 10 числа ходов подвижного основания механизма раскладки, сумматор 11 числа ходов, программный блок 12, регулятор 13 скорости I ско механизма намотки, регулятор рости механизма раскладки. Устройство работает следующим об разом. После заправки нитевидного материала на катушку 3 и включения элек тродвигателя 1 механизма намотки и электродвигателя 6 механизма раскладки начинается намотка нитевидного материала с заданными линей I ной скоростью и шагом раскладки зависящими от угловой скорости электродвигателей 1 и 6, передаточного числа редукторов 2 и 7, начального диаметра катушки 3, угг.а скоса кольцевого профилированного пада 9 выходного вала 8. За 1/2 оборота выходного вала 8 подчижное основание механизма намотки перемещается из одного край него положения в другое крайнее положение, а за следующие 1/2 оборо та выходного вала 8 подвижное основание Ц возвращается в исходное положение. Таким образом, механизм намотки осуществляет также раскладку нити, благодаря чему нитевидный материал в пространстве не перемещается нитераскладчиком. Кроме того благодаря кольцевому профилированно пазу 9 на выходном валу В, реверс нитераскладки осуществляется без ре верса электродвигателя 6 механизма раскладки, что улучшает качество намотки и условия работы механизма. При этом в крайних положениях подвижного основания механизма намотки срабатывает датчик 10 числа ходов, электрически связанный с сумматором 11 числа ходов, который после отсчета заданного числа импул сов выдает сигнал в программный блок 12. Программный блок 12 после каждо го очередного импульса от сумматора 11 числа ходов выдает заранее запрограммированный сигнал управления на вход регулятора скорости 13 элек тродвигателя 1 механизма намотки и второй, заранее запрограммированный сигнал на вход регулятора скорости Ц электродвигателя 6 механизма раскладки. Электродвигатель 1 механизма намотки изменяет угловую скорость таким образом, чтобы сохранить постоянную линейную скорость намотки по мере увеличения диаметра, а электродвигатель 6 механизма раскладки изменяет угловую скорость так, чтобы сохранить неизменный шаг нитераскладки по мере увеличения диаметра намотки. Применение устройства позволяет повысить точность управления и уменьшить простои оборудования из-за нарушения технологического процесса, уменьшить расход сырья и потери его из-за брака. Формула изобретения 1.Устройство для управления намоткой нитевидного материала например стекловолокон, содержащее электродвигатели привода механизма намотки и механизма раскладки нитевидного материала, регулятор скорости намотки, к ВЫХОДУ которого подключен электродвигатель привода механизма намотки, датчик числа ходов механизма раскладки,включенный на вход сумматора числа ходов, и программный блок, один из выходов которого электрически связан с входом регулятора скорости намотки, отличающееся тем, что, с целью повышения точности управления, оно содержит регулятор скорости перемещения механизма раскладки, вход которого электрически связан с другим выходом програймнбго блока, а выход - с электродвигателем механизма раскладки, при этом выход сумматора числа ходов подключен к входу программного блока. 2.Устройство по П.1. отличающееся тем, что механизм намотки нитевидного материала размещен на подвижном основании, а механизм раскладки нитевидного материала выполнен ,в виде кулачкового вала с профилированным пазом, причем основание механизма намотки имеет выступ для взаимодействия с профи5 9258266
лированным пазом механизма расклад- 1. Мильман Я.В. Швырев С.С. ки.Автоматизация технологимеских проИстомники информации-, цессов в текстильной промышленности, принятые во внимание при экспертизе М., 1971.
