Изобретение относится к управлению намоточно-размоточными механизмами и может быть использовано для управления натяжением рулонных материалов, а также трубки из термоусаживающихся материалов в линии ее перемотки и облучения.
Целью изобретения является повышение точности управления.
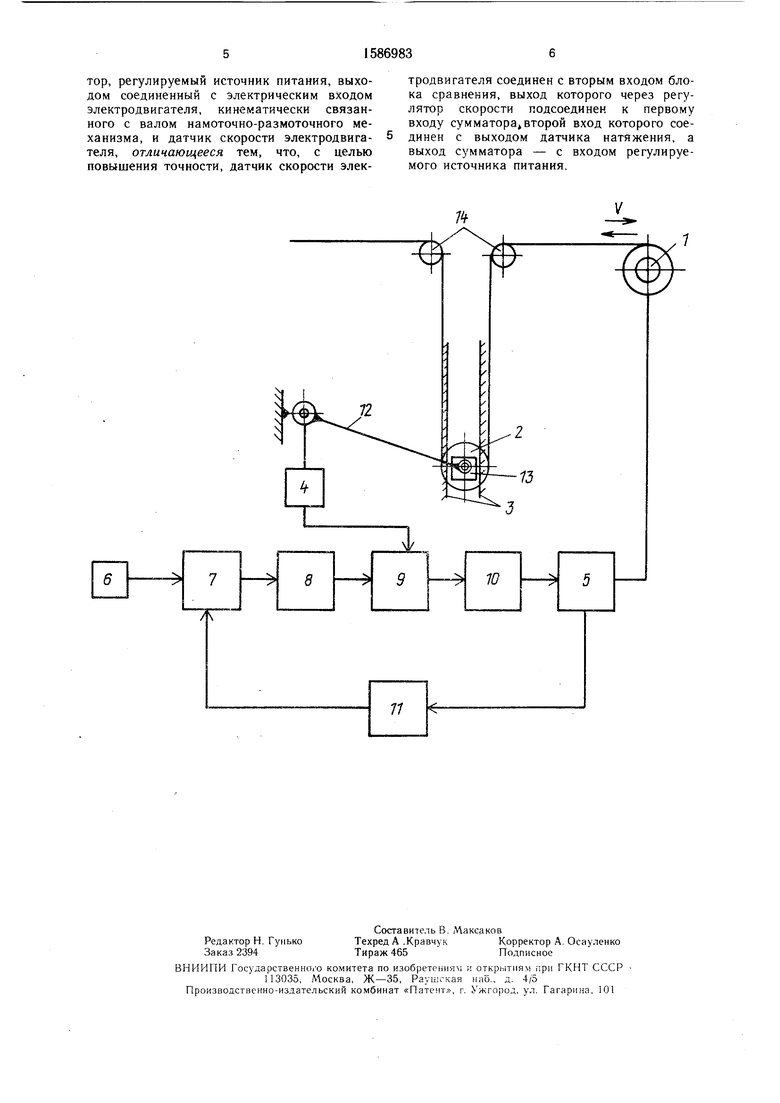
На чертеже представлена блочная схема предлагаемого устройства для стабилизации натяжения рулонного материала.
Устройство содержит намоточно-размо- точный механизм 1, натяжной плавающий ролик 2 с направляющими 3 и датчиком 4 натяжения в виде преобразователя угол - напряжение и систему косвенной стабилизации натяжения, включающую электродвигатель 5, задатчик 6, блок 7 сравнения 7, регулятор 8 скорости, сумматор 9 (блок усиления с регулируемым ограничением), регулируемый источник 10 питания и датчик 11 обратной связи (ЭДС) электродвигателя 5. Входной вал преобразователя угол - напряжение 4 соединен с концом кулисы 12, другой конец которой выполнен в виде вилки, соединенной с концами оси натяженого плавающего ролика 2, выступающими из ползунов 13, перемещающихся в направляющих 3. Выход за- датчика 6 подключен к первому входу блока сравнения 7, второй вход которого подключен к выходу датчика 11 ЭДС электродвигателя 5, а выход блока 7 сравнения подключен к входу регулятора 8 скорости, выход которого подключен к первому входу сумматора 9. Выход сумматора 9 подключен к управляющему входу регулируемого источника 10 питания, выход которого связан с электродвигателем 5, соединенным с валом намоточно-размоточного механизма 1. а второй вход сумматора 9 соединен с датчиком 4 натяжения. Для фиксации формы петли материала служат промежуточные ролики 14.
Намоточно-размоточный механизм 1 представляет собой барабан с рулоном ленты или бобину с трубчатым или нитевидным материалом. Конструкция натяжного плавающего ролика 2 с направляющими 3 представляет собой вал для ленты или ролик с желобом для трубчатого или нитевидного материала, сидящий на оси.
сд
00 05 ;О ОС
со
концы которой установлен г на подшипниках, находящихся внутри ползунов 13, а также через подшипники соединены с концами вилки кулисы 12. Другой конец кулисы -12 в виде втулки с подшипником установлен на неподвижной оси. Торец втулки кулисы 12 сочленяется (например, муфтой) с валом датчика 4 натяжения, который может быть представлен сельсин-датчиком, вращающимся трансформатором или круговым потенциометром. Задатчик 6 может быть выполнен в виде потенциометра, блок 7 суммирования, регулятор 8 и блок 9 усиления в виде печатных плат с интегральными аналоговыми микросхемами. Регулируемый источник 10 питания может быть выполнен в виде управляемого тиристорного преобразователя переменного тока в постоянный или переменного тока а переменный же, но регулируемой частоты, датчик 1 ЭДС - в виде тахометрического моста.
Подготовка устройства к работе.
Перед намоткой материала датчик 4 натяжения связывают с кулисой 12 так, что его выходное напряжение равно нулю при нижнем крайнем положении ползунов 13, при натянутом материале, наименьшем диаметре рулона или бухты и отсутствии движения намоточного механизма.
Перед размоткой материала датчик 4 натяжения связывают с кулисой 12 так, что его выходное напряжение наибольшее при нижнем крайнем положении ползунов 13, натянутом материале, при наибольшем диаметре рулона и отсутствии движения размоточного механизма.
Если механизм должен работать как в режиме намотки, так и в режиме размотки, то преобразователь 4 связывают с кулисой 12, например, как для намоточного механизма, а необходимый вид характеристики сигнала положения для режима размотки получают в этом режиме по известным принципам инверсии сигналов, для чего используют источник постоянного сигнала, подключаемый перед режимом размотки (не показан).
Величину хода ползунов 13 обеспечивают не меньшей, чем по,1уразность длин витков материала, при наибольшем и наименьшем диаметре рулона.
Настраивают схему (не показано), например, с помощью потенциометра, установленного на выходе датчика 4 натяжения таким образом, что кратность уровней ограничения выходного сигнала блока усиления 9 равна кратности наибольшего и наименьшего диаметров рулона.
Устройство работает следующим образом.
Если механизм 1 должен работать в режиме намотки, то материал пропускают через натяжной плавающий ролик 2 и заправляют на барабан или шпулю механизма 1.
Затем, воздействуя задатчиком 6 на контур датчика II ЭДС электродвигателя 5,
создают натяжение материала до момента начала подъема ползунов 13. Если после этого одновременно привести в движение механизм технологической линии, подающий 5 материал на намоточный механизм (не показано) и собственно намоточный механизм, задать линейные скорости материала перед петлей и за ней одинаковыми, то материал наматывается на барабан намоточного механизма с частотой вращения барабана:
-f
где V и г - линейная скорость и радиус ру5лона.
Однако возрастающий радиус г рулона повлечет за собой увеличение длины витка материала на барабане механизма 1, что заставит ролик 2, ползуны 13 и свя- занный с ползунами конец к лисы 12 под- ниматься. Втулка кулисы 12 начнет поворачивать вал датчика 4 натяжения, ограничивая выходной сигнал блока 9 усиления, что приводит X соответствующему снижению выходного напряжения регулируе5 мых источника 10 питания и частоты вращения электродвигателя 5.
Таким образом, система регулирования переходит из режима регулирования ЭДС двигателя в режим стабилизации натяжения материала. Очевидно, что отклонения на0 тяжения от заданного значения, возникающие по другим причинам, ликвидируются аналогично описанному и с учетом знака отклонения.
Если механизм 1 должен работать в размотки, то материал из рулона
5 пропускают через ролих 2 и заправляют в пос;1едующий технологический механизм (не показан), который является ведущим механизмом. Затем, воздействуя этим механизмом на материа.л, создают натяжение до
Q момента начала подъема ползунов 3. Если после этого одновременно привести в движение ведущий, и размоточный механизмы, причем задать линейные скорости материала за петлей и перед ней одинаковыми, то вследствие убывания радиуса
5 рулона происходит уменьшение длины витка на рулоне, подъем ролика 2, уменьшение выходного сигнала датчика 4 натяжения и соответствующий рост скорости вращения электродвигателя 5.
Таким образом, также, как и в режи.ме
0 намотки, система регулирования переходит из режима регулирования Э1,С электродвигателя в режим стабилизации натяжения.
Формула изобретения
Устройство для стабилизации натяжения рулонного материала, содержащее натяжной плавающий ролик с датчиком натяжения, задатчик, .соединенный с первым входом блока сравнения, регулятор скорости, сумматор, регулируемый источник питания, выходом соединенный с электрическим входом электродвигателя, кинематически связанного с валом намоточно-размоточного механизма, и датчик скорости электродвигателя, отличающееся тем, что, с целью повышения точности, датчик скорости электродвигателя соединен с вторым входом блока сравнения, выход которого через регулятор скорости подсоединен к первому входу сумматора, второй вход которого соединен с выходом датчика натяжения, а выход сумматора - с входом регулируемого источника питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод перематывающего устройства | 1988 |
|
SU1578076A1 |
| Устройство для автоматического регулирования натяжения при намотке рулонного материала | 1988 |
|
SU1595774A1 |
| Электропривод осевой намотки | 1989 |
|
SU1737688A1 |
| Устройство для автоматического регулирования натяжения длинномерного материала при перемотке | 1977 |
|
SU638528A1 |
| Устройство для регулирования натяжения | 1984 |
|
SU1301756A1 |
| Многодвигательный электропривод постоянногоТОКА для пОТОчНОй лиНии C пЕРЕМАТыВАю-щиМ МЕХАНизМОМ | 1979 |
|
SU851721A1 |
| УСТРОЙСТВО ДЛЯ РАЗМОТКИ ИЛИ НАМОТКИ РУЛОНОВ МЕТАЛЛОИЗДЕЛИЙ | 2001 |
|
RU2228229C2 |
| Электропривод моталки прецизионного агрегата | 1984 |
|
SU1288876A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ МАГНИТНЫХ ЛЕНТ | 1998 |
|
RU2189641C2 |
| Электропривод моталки | 1980 |
|
SU955488A1 |
Изобретение предназначено для управления намоточно-размоточными механизмами, находящимися в технологической линии обработки гибких материалов, и позволяет стабилизировать натяжение обрабатываемого материала. Устройство содержит намоточно-размоточный механизм, натяжной плавающий ролик с направляющими и датчиком натяжения, электродвигатель, кинематически связанный с намоточно-размоточным механизмом, задатчик, блок сравнения, регулятор скорости, сумматор, регулируемый источник питания и датчик обратной связи. 1 ил.
| Ручные ножницы с пневмоприводом | 1975 |
|
SU526458A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
