1
Изобретение относится к грузо подъемным устройствам, а именно к устройствам для доставки приборов и инструментов в труднодоступные места.
Известен подъемник, содержащий платформу с направляющими, установленную на телескопическом механизме подъёма, концевые упоры, установленные на платформе, центральный упор. Смонтированный на выдвижном штоке привода его перемещения til.
Однако этот подъемник имеет недостаточную надежность так как он обеспечивает слежение по поверхности, противолежащей поверхности обслуживания.
Цель изобретения - повышение надежности подъемника путем обеспечения слежения за поверхностью зоны обслуживания.
Поставленная цель достигается тем, что платформа выполнена Г-образной формы и снабжена шарнирно прикреплен ными к ней одними концами параллельными рычагами, другие концы которых шарнирно соединены с механизмом подъема, при этом последний снабжен смонтированным на нем дополли- о тельным пружинным упором; контактирующим с платформой, причем центральный упор жестко прикреплен к штоку, а концевые упоры выполнены упругими.
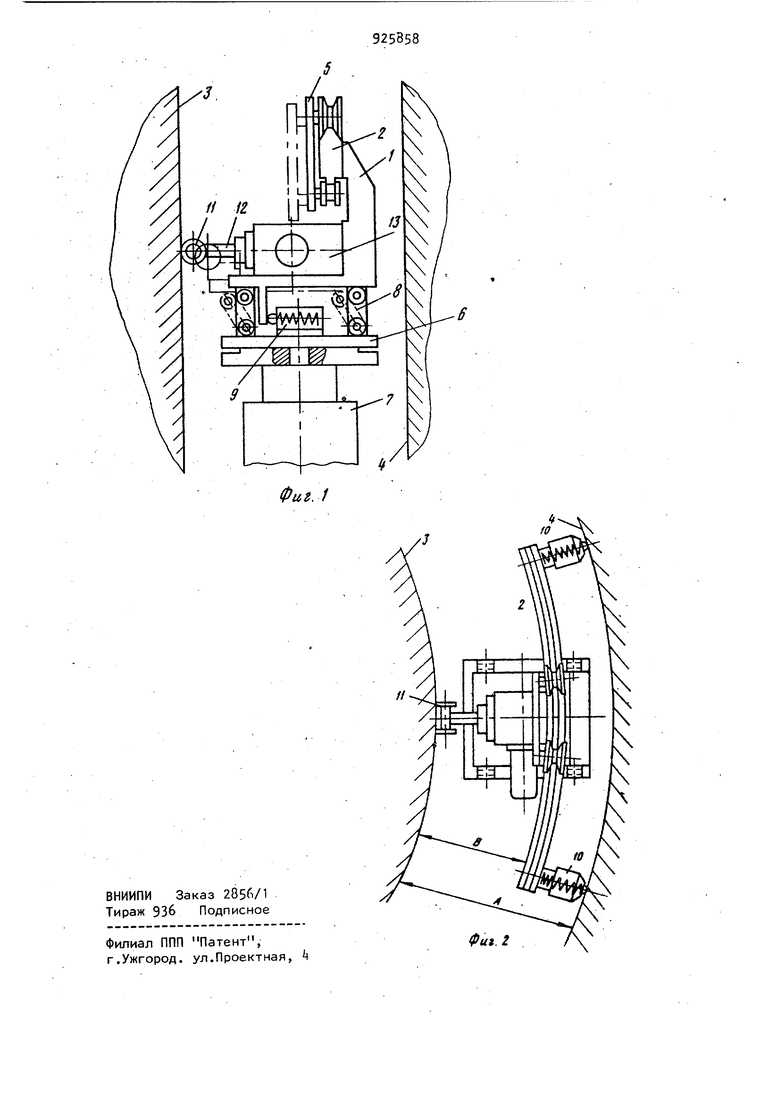
На фиг. 1 представлено устройство, общий вид-, на фиг. 2 - то же, вид сверху.
Устройство состоит из платформы 1 Г-образной формы с направляющей 2, боковые поверхности которой выполнены по радиусу с кривизной, эквидистантной обслуживаемой поверхности 3 и противолежащей ей поверхности А,образующих кольцевое пространство зоны обслуживания. На направляющих 2 с возможностью перемещения по ним установлена самоходная каретка S, перемещающая на роликах {ни чертеже не
обозначены), несущая, например измерительный прибор (на чертеже не показан). Платформа 1 связана с плитой 6 телескопического механизма 7 подъема через шарнирный параллелограмм 8. На плите 6 механизма 7 подъема смонтирован дополнительный пружинный упор 9 контактирующий с платформой 1. На концах платформы 1 установлены концевые упругие упоры 10, опирающиеся на поверхность Ц. Между упорами 1о в центре платформы 1 закреплен центральный упор 11, жестко устанбвленный ,на выдвижном штоке 12 привода 13 его перемещения.,На фиг.2 ;f - ширина кольцевого пространства
зоны, В - расстояние от платформы 1 до обслуживаемой поверхности 3
Устройство работает следующим обра зом. Платформу |-механизмом 7 подъема
.устанавливают в зону обслуживания, включают привод 13 перемещения штока 12. Выдвигают шток 12 с упором 11. Упор П, контактируя с поверхностью 3 обслуживания, перемещает на рычагах параллелограмма 8 платформу 1, преодолевая усилие упора Э до тех пор, пока концевые упоры 10 не касаются поверхности 4. Таким образом, платформа 1 сориентирована и зафиксирована в зоне обслуживания. При перемещении платформы t вдоль образующейс.зоны обслуживания в случае- изменения ширины А кольцевого пространства упор 9 Перемещает платформу 1 в радиальном направлении, выдерживая постоянное расстояние В от платформы 1 до обслуживаемой поверхности 3Применение предлагаемого подъемника обеспечивает постоянство размера от поверхности контролируемого объекта до платформы, несущей измерительный прибор, улучшает условия работы приборов, устанавливаемых на платформу.
Формула изобретения
Подъемник для доставки приборов в щелевые пространства, содержащий платформу с направляющими, установленную на телескопическом механизме подъема, концевые упоры, установленные на платформе, центральный упор, смонтированный на выдвижном штоке привода его перемещения, о т л и чающийся тем, что, с целью повышения его надежности путем обеспечения слежения за поверхностью зоны обслуживания, платформа выполнена Г-образной формы и снабжена шарнирно прикрепленными к ней одними концами параллельными рычагами, другие концы которых шарнирно соединены с механизмом подъема, при этом последний снабжен смонтированным на нем дополнительным пружинным упором,контактирующим с платформой, причем центральный упор жестко прикреплен кштоку, а концевые упоры выполнены упругими.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 582195, кл. В 66 F 13/00, 197 (прототип).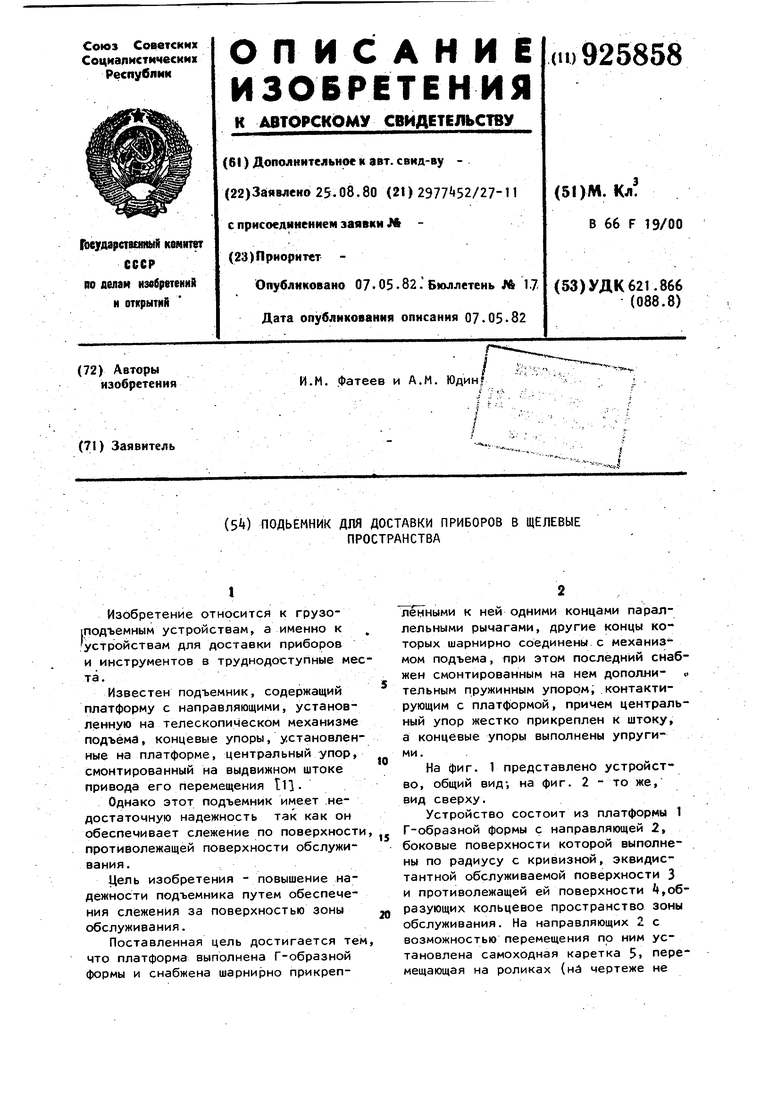
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| Подмости | 1990 |
|
SU1776739A1 |
| Платформа подъемника | 1974 |
|
SU582195A2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
| Подъемник | 1990 |
|
SU1754638A1 |
| Подъемник | 1987 |
|
SU1430338A1 |
| Устройство для доставки приборов контроля | 1987 |
|
SU1499567A1 |
| Складываемый ангар | 1988 |
|
SU1686084A2 |