(DUil
Усилитель 17 входами связан с выходами командоконтролера 1 напора и регулятора 14. Логический блок входами связан с командоконтролером 4 подъема, датчиком 12 и выходом регулятора 14. На входе регулятора 14 сравниваются величины, пропорциональные допустимому с выхода задатчика 16 и текущему расстоянию между стрелой 9 и задней стенкой передней части Р 7. Последнее определяется как сумма сигналов, пропорциональных вылету и
углу наклона Р 7. При уменьшении текущего расстояния от допустимого с выхода регулятора 14 через усилитель на систему управления (СУ) 2 напором подается сигнал на уменьшение или реверсирование скорости приближения Р 7 к стреле 9. Преобразователь 13 реализует нелинейную зависимость между углом наклона Р 7 и изменением расстояния между стрелой 9 и Р при неизменном ее вылете, 1 sin ф-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом копания карьерного экскаватора | 1986 |
|
SU1425284A2 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство управления экскаватором типа прямая лопата | 1982 |
|
SU1082915A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1980 |
|
SU910956A1 |
Изобретение относится к САУ одноковшовых экскаваторов и позволяет повысить надежность за счет защиты стрелы от удара рукоятью (Р). Для этого устр-во снабжено датчиками скорости 10 привода напора, вылета 11 Р 7 и угла наклона 12 Р 7, задат- чиком 16 допустимого приближения, дифференцируюпцш элементом 15, одно- полярным усилителем 17, функциональным преобразователем 13, логическим блоком и регулятором 14 положения Р.
Изобретение относится к системам управления одноковшовых экскаваторов типа прямая лопата и предназначено для защиты стрелы от ударов задней стороной передней части рукояти
Цель изобретения - повьш1ение надежности за счет защиты стрелы от удара рукоятью.
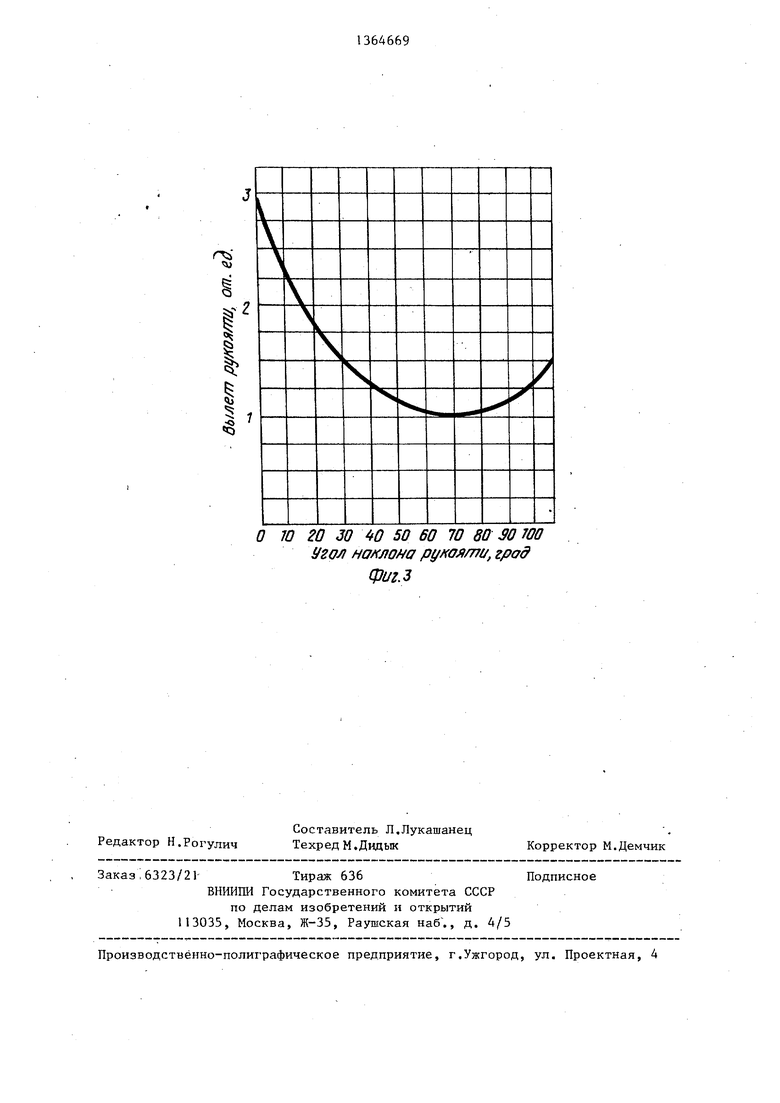
На фиг. 1 изображена функциональ- ная схема устройства для управления экск-аватором типа прямая лопата; на фиг.2 - функциональная схема Логического устройства; на фиг.З - реализуемая функциональным преобразова- телем зависимость граничной величины вылета рукояти от угла поворота сед- лового подпшпника,
Командоконтроллер 1 напора выходо подключен к системе 2 управления приводом напора 3, командоаппарат 4 подъема выходом подключен к системе 5 управления приводом 6 подъема. Рукоять 7 посредством седлового подшипника 8 крепится к стреле 9.
Датчик 10 скорости привода напора датчик 11 вылета рукояти, датчик 12 угла наклона рукояти через функциональный преобразователь 13 подключен к входам регулятора 14 положения ру- кояти, К другим входам регулятора 14 присоединены дифференцирующий элемент 15, входом связанный с выходом функционального преобразователя 13, и задатчик 16 допустимого приближе- ния.
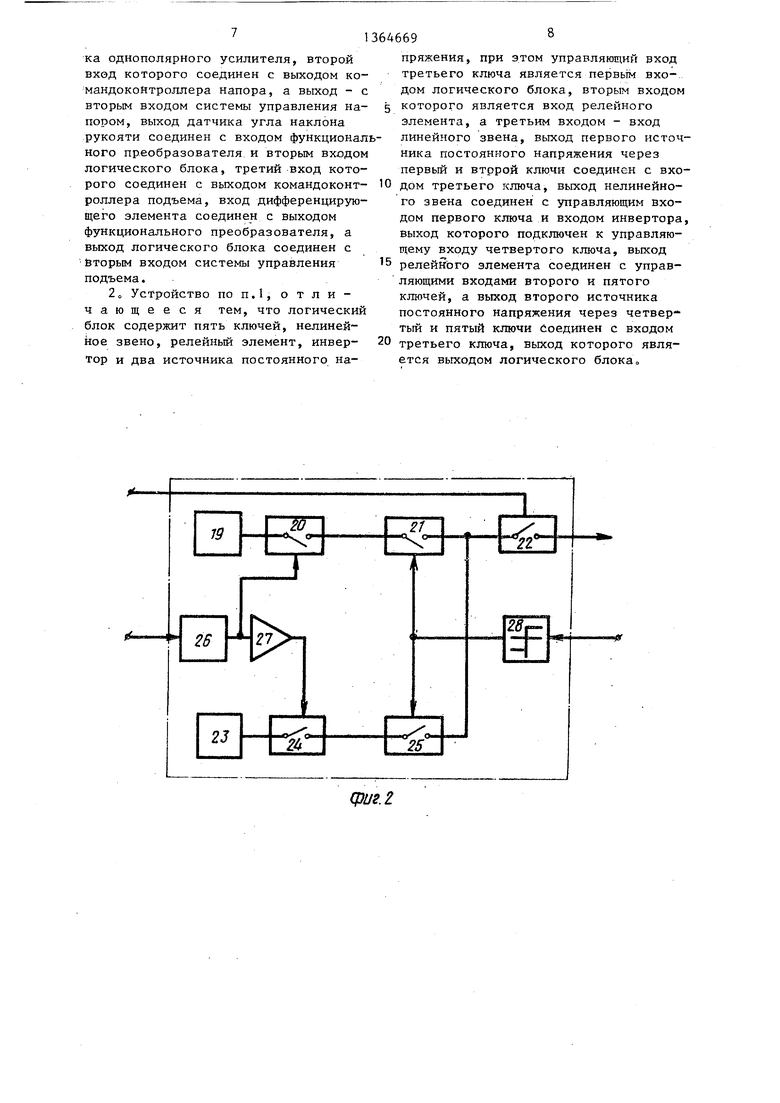
Однополярный усилитель 17 входами связан с выходами командоаппарата 1 напора и регулятора 14 положения рукояти. Логический блок 18 входами связан с командоконтроллером подъема 4, датчиком 12 угла наклона рукояти и с выходом регулятора 14 положения рукояти. Логический блок 18 содержит первый источник 19 постоянного напряжения, соединенный черкез последовательно включенный первый ключ 20, второй ключ 21 и третий ключ 22 с входом системы 5 управления.привода подъема.
Второй источник 23 постоянного напряжения через четвертый ключ 24, пятьй ключ 25 и третий ключ 22 также соединен с системой 5 управления приводом подъема. Нелинейное звено 26, входом подключенное к командоаппара- ту 4 подъема, выходом связано, с управляющим входом ключа 20 и через ин- вертор 27 с управляющим входом ключа 24. Управляющий вход ключа 22 подключен к выходу регулятора 14 положения рукояти. Релейный элемент 28, входом связанньш с датчиком угла наклона рукояти, подключен выходом к управляющим входам второго 21 и пятого 25 ключей.
Устройство функционирует следующим образомс
Рассмотрим его вначале без учета скорости привода 6 подъема. Опасность удара по стреле 9 возникает при приближении I к ней задней или внутренней стороны передней части рукояти
ближе определенного расстояния. Это расстояние определяется величиной тормозного пути, необходимого для останова рукояти без ее удара о стре10
15
приближения к стреле внутренней стороны передней части рукояти. Таким образом, управление приводом напора осуществляется в функции удаления рукояти от стрелы и скорости изменения этого удаления.
На однополярный усилитель 17, кроме сигнала с регулятора 14 положения , подается также сигнал с выхода командоаппарата 1 напора. Максималь- ный сигнал на выходе усилителя 17 в два раза больше максимального сигнала с выхода командоаппарата напора на втягивание рукояти. Зона нечувствительности усилителя 17 выбирается равной максимальному сигналу с выхода командоаппарата 1 напора на втягивание рукояти. При максимальном сигнале на выходе регулятора 14 положения и максимальном сигнале командоаппарата в направлении на втягивание рукояти сигнал с выхода однополярного усили - теля 17 также максимален и он дейстлу. Положение задней стороны перед;- ней части рукояти 7,относительно стрелы 9 зависит от вылета рукояти, который определяется с помощью датчика 11,вылета рукояти. Однако при одном и том же вьшете рукояти расстояние от задней стороны ее передней части до стрелы нелинейио зависит от угла наклона рукояти 7. Влия- ние угла наклона рукояти на ее расстояние до стрелы является нелинейным и может быть рассг итано по известной методике.
Угол наклона рукояти определяется с помощью датчика 12 угла наклона рукояти, механической передачей связанного с седловым подщипником 8. Нелинейная зависимость между углом наклона рукояти и изменением расстоя- 20 ния между стрелой и задней стороной .передней части рукояти реализуется С помощью функционального преобразователя 13 фиг.З).
Сигналы с датчика 11 вьшета рукоя- 25 вует на систему 2 управления напором ти и функционального преобразователя в направлении на выдвижение рукояти. 13 поступают на входы регулятора 14 Таким образом, однополярный усили- положения рукояти. Сумма этих сигналов пропорциональна текущему расстоянию между стрелой и внутренней сторо- 30 ной передней части рукояти.
Сигнал с выхода задатчика 16 определяют минимально допустимое прибли-.: жение рукояти к стреле Если этот сигнал меньше суммы сигналов с датчика 11 и с функционального преобразо-, вателя 13, на выходе регулятора положения рукояти напряжение равно нулю. В противном случае на выходе, регулятора 14 положения рукояти появляется 40 сигнал, поступающий на вход однополярного усилителя, имеющего характеристику с зоной нечувствительности и с насыщением.
В зависимости от скорости приближения рукояти к стреле значение минимально допустимого приближения рукояти к стреле корректируется с помощью датчика 10 скорости привода напора и дифференцирующего элемента 15. Сиг- gg по стреле возможен даже при макси- нал на выходе датчика Ю скорости мальной скорости привода напора в напора пропорционален производной направлении вьщвижение рукояти. Этот вьтета рукояти, а сигнал на выходе . удар может возникнуть, например, при дифференцирующего элемента 15 - про- поднятом ковще, малом вылете рукояти изводной напряжения, характеризующего gg и большой скорости привода на подъем, приближения рукояти к стреле, вызывае- или при опущенной рукояти и большой мое ее поворотом относительно мгновен- скорости привода подъема на опускание ного центра вращения. Сумма этих двух ковша. Поэтому в этих ситуациях с вы- сигналов пропорциональна скорости хода логического блока 18 на систему
тель 17 совместно со связью медДУ ко- мандоаппаратом напора 1 и системой 2 управления выполняют функцию узла выделения наибольшего из двух сигналов: от регулятора 14 положения рукояти и от командоаппарата напора, измеренного от значения, соответст- 25 вующего максимальному напряжению на втягивание рукояти.
Функционирование регулятора 14 положения рукояти исключает возможность удара рукоятью по стреле в результате ошибочных переключений ко- . мандоаппаратом напора 1, производимых машинистом, только при относительно небольших значениях скорости привода подъема.
Исследование кинематики движения рукояти, а также анализ аварий экскаваторов, возникших в результате ударов по стреле, показывает, что в отдельных положениях рукояти удар
45
0
5
приближения к стреле внутренней стороны передней части рукояти. Таким образом, управление приводом напора осуществляется в функции удаления рукояти от стрелы и скорости изменения этого удаления.
На однополярный усилитель 17, кроме сигнала с регулятора 14 положения , подается также сигнал с выхода командоаппарата 1 напора. Максималь- ный сигнал на выходе усилителя 17 в два раза больше максимального сигнала с выхода командоаппарата напора на втягивание рукояти. Зона нечувствительности усилителя 17 выбирается равной максимальному сигналу с выхода командоаппарата 1 напора на втягивание рукояти. При максимальном сигнале на выходе регулятора 14 положения и максимальном сигнале командоаппарата в направлении на втягивание рукояти сигнал с выхода однополярного усили - теля 17 также максимален и он дейст0
25 вует на систему 2 управления напором в направлении на выдвижение рукояти. Таким образом, однополярный усили 30
40
gg по стреле возможен даже при макси- мальной скорости привода напора в направлении вьщвижение рукояти. Этот удар может возникнуть, например, при поднятом ковще, малом вылете рукояти gg и большой скорости привода на подъем, или при опущенной рукояти и большой скорости привода подъема на опускание ковша. Поэтому в этих ситуациях с вы- хода логического блока 18 на систему
тель 17 совместно со связью медДУ ко мандоаппаратом напора 1 и системой 2 управления выполняют функцию узла выделения наибольшего из двух сигналов: от регулятора 14 положения рукояти и от командоаппарата напора, измеренного от значения, соответст- 25 вующего максимальному напряжению на втягивание рукояти.
Функционирование регулятора 14 положения рукояти исключает возможность удара рукоятью по стреле в результате ошибочных переключений ко- . мандоаппаратом напора 1, производимых машинистом, только при относительно небольших значениях скорости привода подъема.
Исследование кинематики движения рукояти, а также анализ аварий экскаваторов, возникших в результате ударов по стреле, показывает, что в отдельных положениях рукояти удар
45
5 управления подъема подается сигнал, уменьшающий скорость подъемной лебедки. Так при подъеме рукояти этот сигнал подается в систему управления приводом подъема от первого источника 19 постоянного напряжения через первый 20, второй 21 и третий 22 ключи, если эти ключи замкнуты. Замыкание ключа 20 происходит при подаче 10 на его управляющий вход положительного сигнала с нелинейного звена 26, входом соединенного с командоаппара- том подъема 4, Положительный сигнал на выходе нелинейного зйена 26, имею- 45 щего релейную характеристику с зоной нечувствительности, появляется при сигнале задания скорости подъема в направлении на подъем ковша и значении этого сигнала большем половины 20 от Максимального значения.
Замыкание ключа 21 происходит при подаче на его управляющий вход положительного сигнала, с выхода релейного
большем 90. Одновременно можно замкнуть один из двух ключей, второй 21 или пятый 25.
Таким образом, защита стрелы от удара рукоятью осуществляется путем воздействия на привод напора в функции положения рукояти, а при определенных ситуациях - путем уменьшения скорости привода подъемао
Датчик 12 угла наклона рукояти и датчик 11 вылета рукояти можно реализовать на базе датчиков положения« Нелинейное звено 26, релейный элемент 28, функциональный преобразователь, дифференцирующий элемент 15 можно реализовать на базе операционного усилителя Ключи можно выполнить на базе микросхем. Указанные элементы можно реализовать на базе серийно выпускаемых интегральньпс микросхем. Регулятор 14 положения целесообразно реализовать пропорциональным на основе операционного усилителя. Одэлемента 28, входом связанного с дат- нополярный усилитель 10 и логическое
чиком 12 угла наклона рукояти.
Положительньш сигнал на выходе релейного элемента 28 соответствует углу меркду верхней частью стрелы и рукоятью, меньшем 90 о Замыкание ключа 22 происходит при появлении положительного сигнала на выходе регулятора 14 положения рукояти, т.е.. при возникновении опасности удара по стреле. При, опускании ковша на вход системы 5 управления подъема через четвертый 24, пятый 25 и третий 22 ключи поступает сигнал от второго источника постоянного напряжения; действующий на уменьшение скорости опускания ковша и имеющий полярность, обратную полярности первого источника 23 постоянного напряжения. Ключ 24 замкнут, если на его управляющий
30
устройство 18 можно выполнить также на операционных усилителях. Задатчик допустимого приближения выполнен на базе источника постоянного напряжения .
Формул а изобретения
снабжено датчиком скорости привода вход с инвертора 27 поступает положи- 45 напора, датчиком вылета рукояти, дат- тельный сигнал. Положительный сигнал чиком угла наклона рукояти, задатчи- на выходе инвертора 27, входом связан- ком допустимого приближения, диффе- ного с нелинейным звеном 26, появляется при положении командоаппарата 4 подъема на спуск ковша и задании на скорость: подъема не меньше половины от максимального. Одновременно замкнут может быть только один из двух ключей: первый 20 или четвертьй 24. Ключ 25 замыкается при подаче на
ренцирующим элементом, однополярным усилителем, функциональным преобразо50 вателем, логическим блоком и регулятором положения рукояти, при этом выходы датчика скорости привода напора, датчика выпета рукояти, задатчи- ка допустимого приближения, функцир55 нального преобразователя и дифференего управляющий вход отрицательного сигнала с выхода релейного элемента 28, появляющегося при угле между верхней частью стрелы 9 и рукояти.
большем 90. Одновременно можно замкнуть один из двух ключей, второй 21 или пятый 25.
Таким образом, защита стрелы от удара рукоятью осуществляется путем воздействия на привод напора в функции положения рукояти, а при определенных ситуациях - путем уменьшения скорости привода подъемао
Датчик 12 угла наклона рукояти и датчик 11 вылета рукояти можно реали зовать на базе датчиков положения« Нелинейное звено 26, релейный элемен 28, функциональный преобразователь, дифференцирующий элемент 15 можно реализовать на базе операционного усилителя Ключи можно выполнить на базе микросхем. Указанные элементы можно реализовать на базе серийно выпускаемых интегральньпс микросхем. Регулятор 14 положения целесообразно реализовать пропорциональным на основе операционного усилителя. Од
устройство 18 можно выполнить также на операционных усилителях. Задатчик допустимого приближения выполнен на базе источника постоянного напряжения .
Формул а изобретения
снабжено датчиком скорости привода 45 напора, датчиком вылета рукояти, дат- чиком угла наклона рукояти, задатчи- ком допустимого приближения, диффе-
ренцирующим элементом, однополярным усилителем, функциональным преобразо50 вателем, логическим блоком и регулятором положения рукояти, при этом выходы датчика скорости привода напора, датчика выпета рукояти, задатчи- ка допустимого приближения, функцир55 нального преобразователя и дифференцирующего элемента подключены к соответствующим входам регулятора положения рукояти, выход которого соединен с первыми входами логического блока однополярного усилителя, второй вход которого соединен с выходом ко- мандоконтроллера напора, а выход - с вторым входом системы управления напором, выход датчика угла наклона рукояти соединен с входом функдионал ного преобразователя и вторым входом логического блока, третий вход которого соединен с выходом командоконт- роллера подъема, вход дифференцирующего элемента соединен с выходом функционального преобразователя, а выход логического блока соединен с йторым входом системы управления подъема.
2о Устройство по п.1, о т л и - чающееся тем, что логический блок содержит пять ключей, нелинейное звено, релейный элемент, инвертор и два источника постоянного на-
364669
пряжения, при этом управляющий вход третьего ключа является первьтм входом логического блока, вторым входом 5 которого является вход релейного элемента, а третьим входом - вход линейного звена, выход первого источника постоянного напряжения через первый и второй ключи соединен с вхо- 10 дом третьего ключа, выход нелинейного звена соединен с управляющим входом первого ключа и входом инвертора, выход которого подключен к управляющему входу четвертого ключа, выход 5 релейного элемента соединен с управляющими входами второго и пятого ключей, а выход второго источника постоянного напряжения через четвер тый и пятый ключи Соединен с входом третьего ключа, выход которого является выходом логического блока о
20
(р1/.2
О Ю 20 30 0 SO 60 70 80 SO 700 Уго/) ру/ олл71/,град
фиг.з
| Устройство для управления электроприводами подъема и тяги драглайна | 1974 |
|
SU641038A1 |
| Авторское свидетельство СССР № 1146380, кл.Е 02 F 9/20, 1982. | |||
