I
Изобретение относится к машиностроению и может быть использовано в технологических машинах-автоматах многих отраслей промышленности а также в устройствах с одновременным вращением параллельных валов.
Наиболее близким из известных к изобретению является шарнирно-рычажный механизм, содержащий шарнирио соединенную Стойку, три кривошипа и треугольный шатун fll.
Недостатком этого механизма Является необходимость в точном изготовлении звеньев.
Цель изобретения - компенсация погрешностей изготовления звеньев, механизма.
Указанная цель достигается тем, что в механизме, содержащем шарнирно соединенные стойку, три кривошипа и трегоульный шатун, последний выполнен из двух частей, соединенных поступательной или рращательной, или вращательно-поступательной парами.
или двумя параллельными стержнями, шарнирно связанными с обеими частями.
При этом кахчдая часть треугольного шатуна представляет собой угольник с пазами на концах, с которыми взаимодействуют пальцы кривошиМов с возможностью поступательного и (или) вращательно-поступательного движения.
Кроме того, палец кривошипа, лежащего против стороны треугольного шатуна с изменяющейся длиной, соединен с двумя другими сторонами этого шатуна посредством двух шарнирно связанных стержней, а вращательная пара, соединяющая обе части шатуна с соответствующим кривошипом, выполнена в вире цву4, шарнирно связанных между собой стержней.
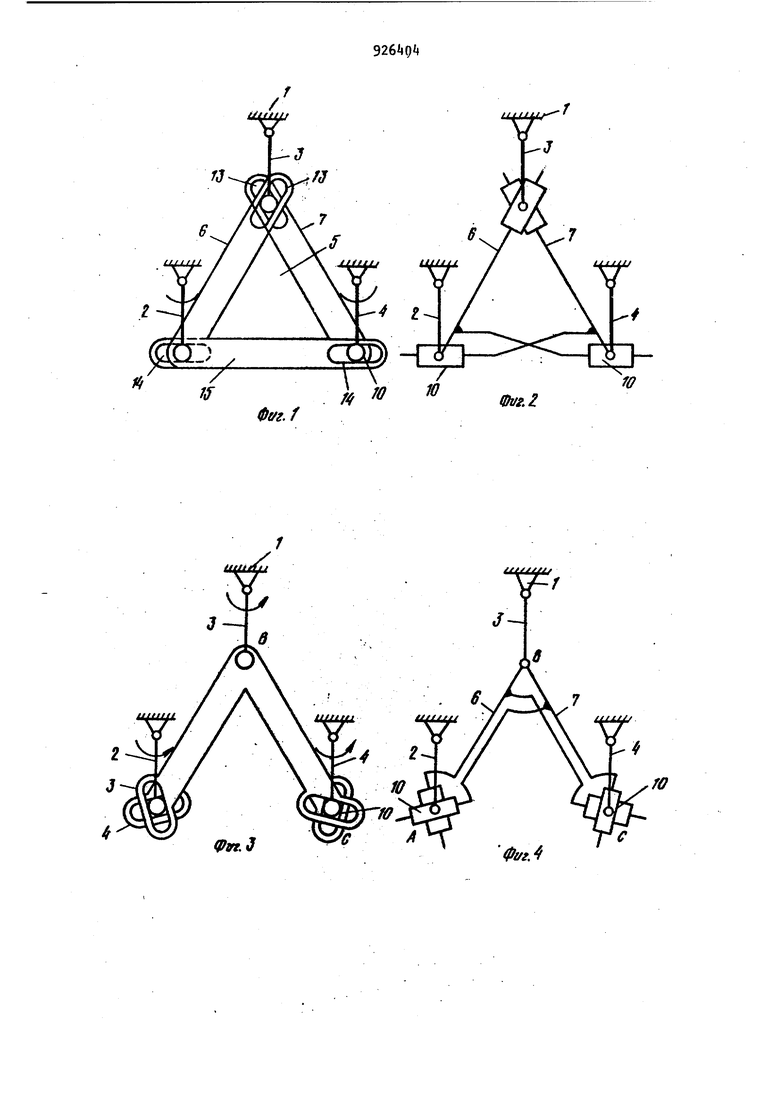
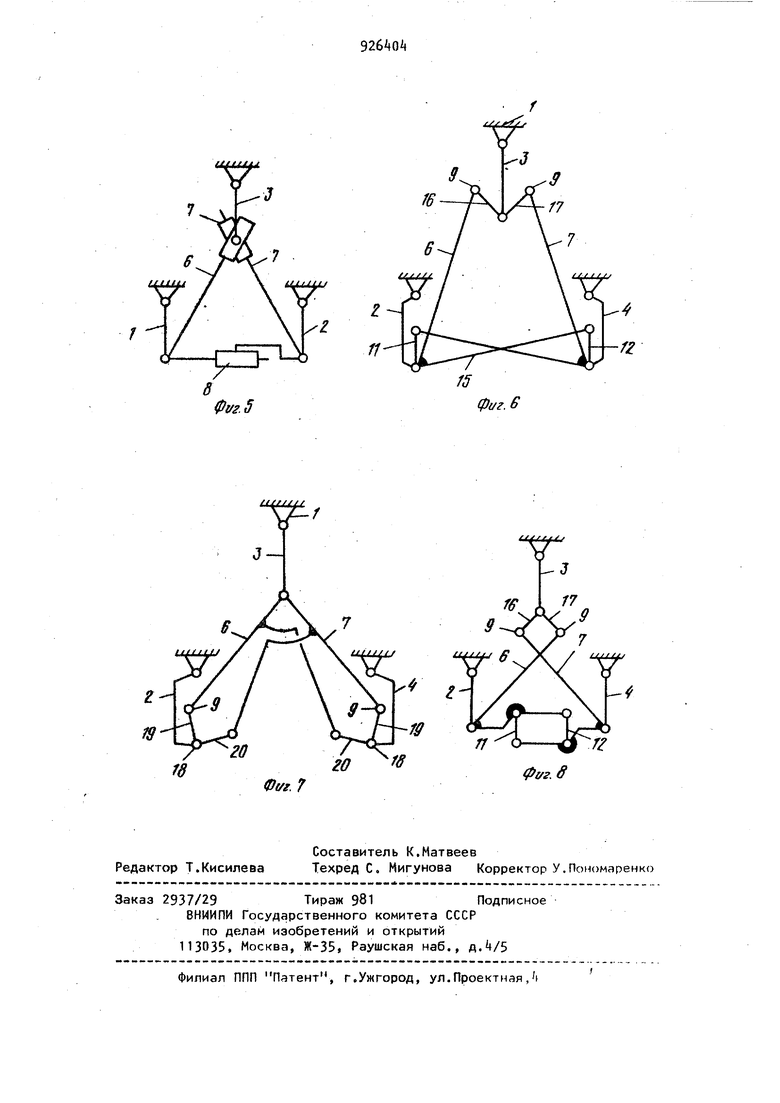
На фиг.1 изображен шарнирно-рычажный механизм; на фиг.2-6 - варианты вращательно-поступательного соединения частей шатуна; на фиг.7 и 8 39варианты соединения частей шатуна при помощи вращательных пар. Механизм содержит шарнирно соединенные с стойкой 1 tpи кривошипа 2-k и треугольный шатун 5, две части 6 и 7 треугольного шатуна 5, сое диненных поступательной 8 или вращательной 9, или вращательно-поступательной 10 парами, или двумя пара лельными стержнями 11 и 12, шарнирно связанными с обеими частями 6 и Каждая часть 6 и 7 треугольного Шатуна может быть выполнена в виде угольников с пазами 13 и 1 на концах, с которыми взаимодействуют пал цы кривошипов 2- с возможностью по тупательного и (или) вращательно-по тупательного двих(ения. Палец кривош па 3 лежащего против стороны 15 треугольного шатуна 5 с изменяющейся длиной, соединен с двумя другими сторонами этого шатуна посредством двух шарнирио связанных стержней 16 и 17. Вращательная пара 18, соединяющая обе части 6 и 7 шатуна с кривошипами 2 и , выполнена в виде двух, шарнирно связанных с ними и между собой, стержней 19 и 20. Механизм работает следуюи4им обра При вращении кривошипа 3 в механизме, содержащем поступательные пары, и наличии погрешностей изготовления, например, в межосевом рас стоянии кривошипов 2 и , обе части 6 и 7 треугольного шатуна 5 могут удаляться или сближаться относитель но друг друга. При этом не нарушает ся одновременное вращение кривошипов 2-4. Аналогично для исполнения механизма только с вращательными парами обе части шатуна также могут сближа ся или удаляться относительно друг друга. Предлагаемый механизм позволяет осуществлять одновременное вращение трех кривошипов при наличии погрешностей изготовления. Формула изобретения 1.Шарнирно-рычажный механизм, содержащий шарнирно соединенные стойку, три кривошипа и треугольный шатун, отличающийся тем, что, с целью компенсации погрешностей изготовления звеньев механизма, треугольный шатун выполнен из двух частей, соединенных поступательной, или вращательной, или вращательнопоступательной парами, или двумя параллельными стержнями, шарнирно связанными с обеими частями. 2.Механизм по п.1, о т л и ч а ющ и и с я тем, что каждая часть треугольного шатуна представляет собой угольник с пазами на концах, с которыми взаимодействуют пальцы кривошипов с возможностью поступательного и или вращательно-поступательного ; движения. 3.Механизм по п.1, о т л и чающийся тем, что палец кривошипа, лежащего против стороны треугольного шатуна с изменяющейся длиной, соединен с двумя другими сторонами этого шатуна посредством двух шарнирно связанных стержней. 4.Механизм по п, отличающийся тем, что вращательная пара, соединяющая обе части шатуна с соответствующим криво1чипом, выполнена в виде двух, шарнирно CBrfзанных с ними и между собой стержней. Источники информации, принятые во внимание при экспертизе 1. Артоболевский И.И. Механизмы в современной технике. М., Наука, Т.1, с,386, фиг.640 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| Механизм тройного шарнирного параллелограмма | 1978 |
|
SU763633A1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| КУЛИСНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 1996 |
|
RU2138711C1 |
| ПЛАНЕТАРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 1991 |
|
RU2029186C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Кулачково-зубчато-рычажный механизм | 1987 |
|
SU1567825A1 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
фуг. 5
Г6
фиг. 6
