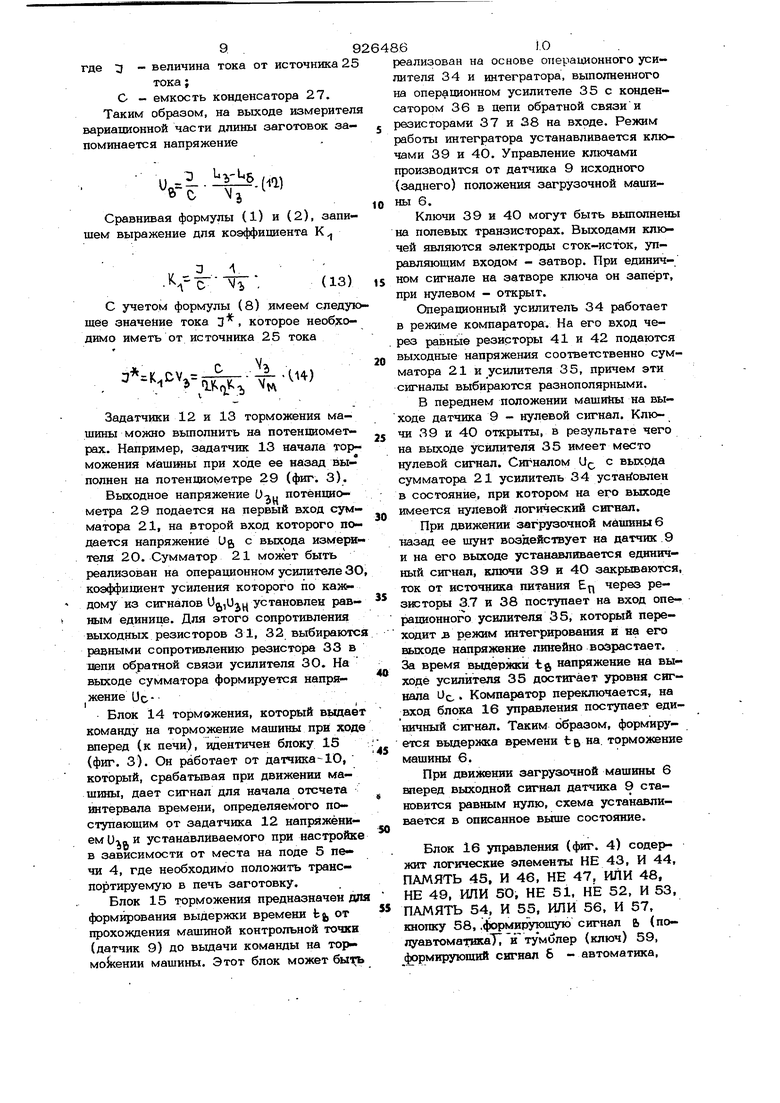
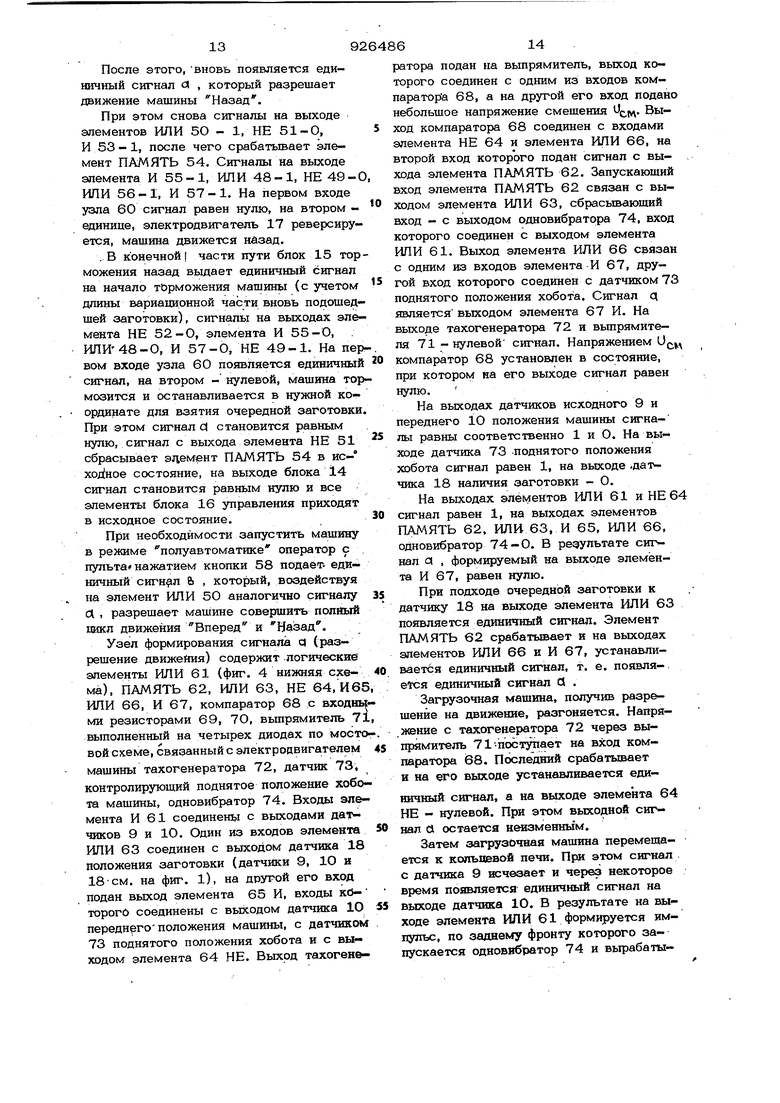
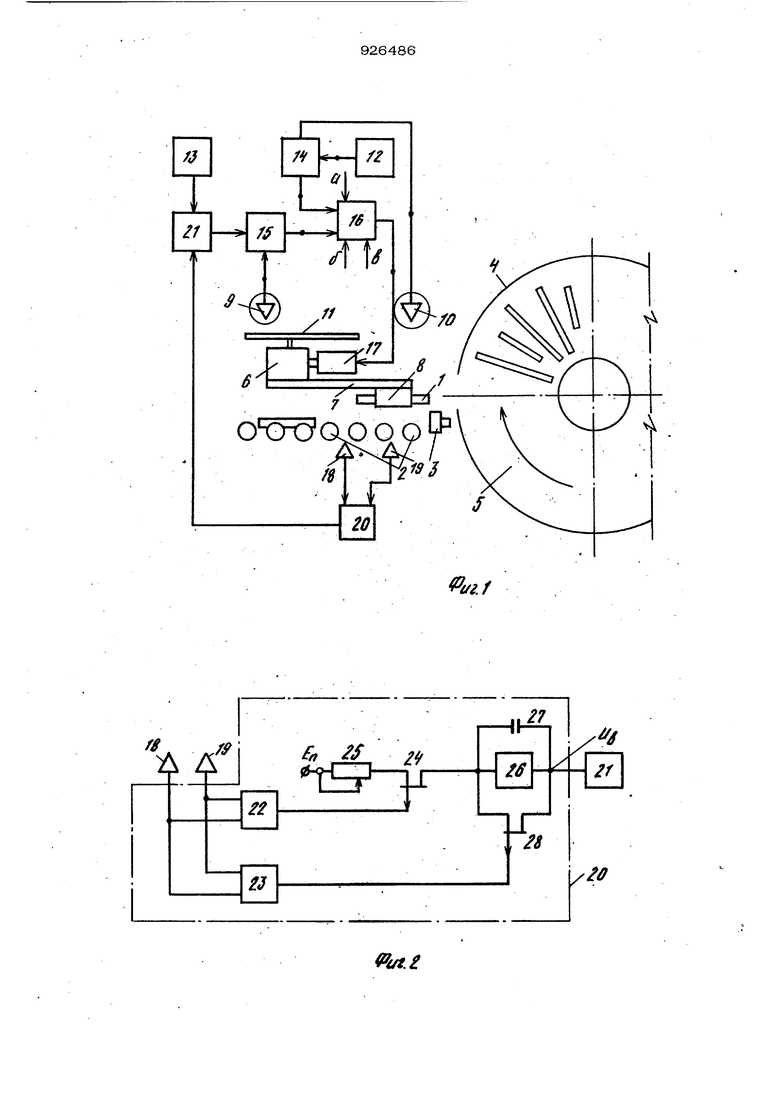
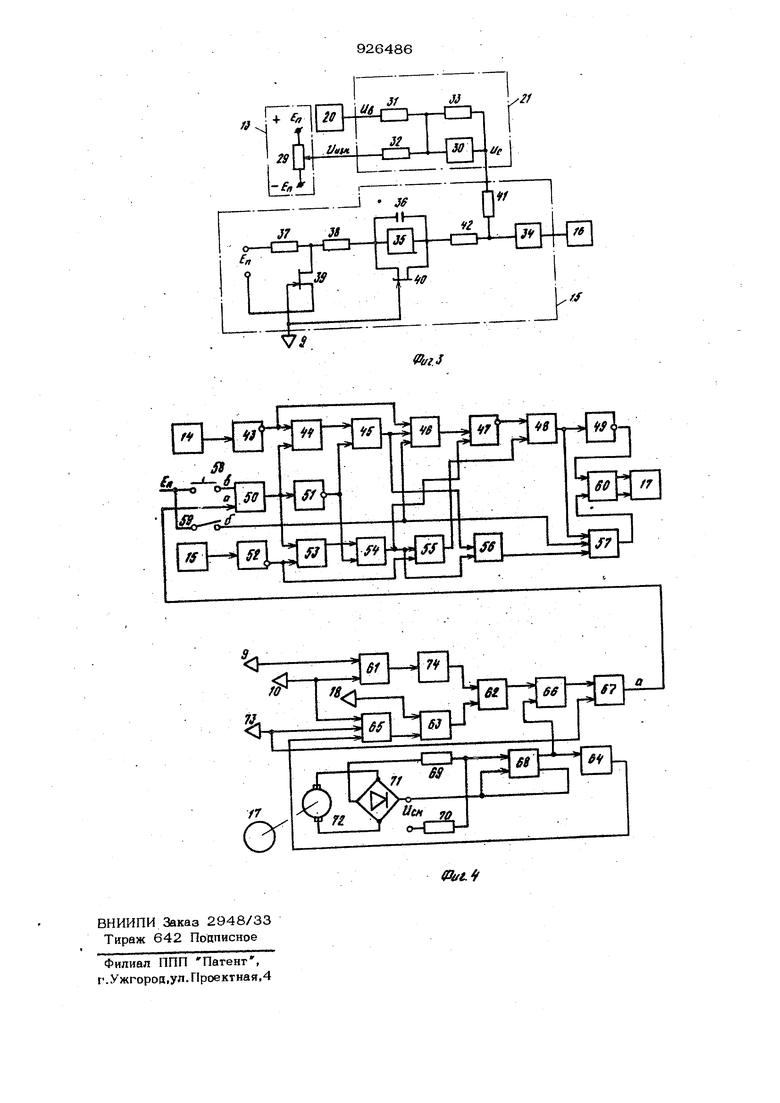
дину (симметрично относительно концов заготовки) Однако требованвд экономии металла и безостаточного раскроя штанг на заготовки приводят к значительному разбросу по длине смежных заготовок, и как следствие, к асимметричному захвату заготовок, дополнительным манипуляциям по захвату заготовок и снижению производительности загрузочной машины. Цель изобретения - повышение производительности загрузочной машины за счет сокращения времени манипулирования по захвату заготовок. Поставленная цель достигается тем, что в устройство автоматического управ ления электродвигателем перемещения загрузочной машины, содержащее датчики положения машины, каждый из которых соединен с блоками торможения Ъперед .и Назад соответственно, выходы которых подключены ко входам блока управления электродвигателем, задатчик начала торможения электродвигателя при ходе машины вперед (к печи), выход которого подключен к соответству щему блоку торможения, дополнительно введен измеритель длины заготовки, выход которого соединен с одним иа входо блока торможения Назад. На фиг. 1 представлена блок-схема устройства автоматического управления электродвигателем загрузочной машины совместно со схемой расположения части оборудования технологической линии загрузки заготовок; на фиг. 2 - схема измерителя вариационной части длины заготовок; на фиг. 3 - схемы задатчика сумматора и блока торможения; на фиг.4 схема блока управления. Заготовки 1 {фиг. 1) поочередно подводятся рольгангом 2 .к упору 3. Подводящий рольганг разделен на секции, иа предпоследней секции рольганга обычно находится очередная заготовка, а на последней секции - загружаемая заготовка Заготовки загружаются в кольцевую печь 4 на вращающийся под 5. Загрузочная машина 6 содержит приводную тележку с колесами, обеспечивающую перемещение машины по рельсам вперед (к печи) и назад (в исходное положение, изображенное на фиг. 1), хобот 7 (перемещаемый пневмоприводом ерх и вниз), клещи 8 (зажимаемые и открываемые пневмоприводом, причем пневмоприводы на фиг. 1 не показаны). На фиг. 1 изображено положение, когда зажатые клещи 8 удерживают взятую им перед упором 3 заготовку 1, поднятую хоботом 7 над рольгангом 2. При перемещении загрузочной машины вперед заготовка 1 вводится внутрь печи 4. После опускания хобота 7 и открытия клещей 8 заготовка 1 укладывается на под 5 печи. 4. Положение машины 6 контролируется датчиками 9 (при ходе назад) и 10 (при ОД вперед). Датчики 9 и 1О могут быть индуктивными, реагирующими на наличие в зоне их действия металлической линейки (шунта) 11, укрепленной на машине и перемещаемой относительно датчиков при движении машины. Устройство с одержит, зад атчики 12 и 13 начала торможения машины соответственно при ходе ее вперед (к печи) и назад, блоки 14 и 15 торможения при движении вперед и назад, блок 16 управления иэлектродвигатель 17. Для запуска машины в блок 16 управления подаются сигналы: а - сигнал разрещения движения машины из исходного положения, появляющийся после взятия очередной заготовки и поднятия хобота в верхнее-положение; 5 j В - сигналы разрешения работы устройства в автоматическом и полуавтоматическом режимах соответств нно. Измеритель длины заготовок на последней секции рольганга содержит два датчика 18 и 19, измеритель 20 вариационной части длины заготовки, сумматор 21 и задатчик 13 начала торможения Назад претем аходы.измерителя 20 вариационной части соединены с выходами датчиков 18 и 19 положения заготовки на поспедаей секции ролгаганга 2, а выхоа с рдним из входов сумматора 21, вход которого соединен с выходом задатчика 13 начала торможения Назад. Измеритель 2 О длинь вариационной части заготовки (фиг. 2) содержит элементы И 22, ЗАПРЕТ 23, ключ 24 задуска, регулируемый источник 5 тока, сшерашонный усилитель 26 с конденсатором 27 в цепи обратной связи, ключ 28 сброса , причем вькод датчика 18 соединен с первыми входами элементов И 22 и ЗАПРЕТ 23, выход датчика 19 со вторым входом элемента И 22 и со вторым, .запрещающим, входом элемента ЗАПРЕТ23, выход операционного усилителя 26 является выходом измерителя вариационной части длины заготовки. Устройство работает следующим образом. 59 В исходном (заднем) положении машины 6 датчик 9 выдает единичный сигнал в блок 15 торможения. Хобот 7 поднят, а клещи 8 зажаты и удерживают заготовку 1 за ее середину. Уставка задания в задатчике 12 установпейа таким образом, чтобы центр клешей 8 при ходе .вперед (к печи) останавливался на нужном радиусе пода печи, а уставка задатчика 13 так, чтобы при ходе назад указанный центр клещей останавливался в точке, соответствующей середине заготовки минимальной длины. Выходное напряжение на выходе измерителя 2 О вариационной части, подаваемое на один из входов сумматора 21, вместе с напряжением уставки задатчика 13 обеспечивает остановку машины в точке, соответствующей середине находящейся в клещах 8 заготовки 1. На выходе блока 16 управления сигна включения электродвигателя 17 отсутствует и загрузочная мащина 6 неподвижна При появлении на предпоследней секшш рольганга очередной заготовки, после перехода ее на последнюю секцию роль- Ганга 2, срабатывает датчик 18 наличия заготовки и появляется сигнал с( . Кроме того, сигнал с датчика 18 сб расывает запомненную информацию о длине вариационной части предыдущей заготовки. При наличии на входах блока 16 единичных сигналов 5 или 6 блок управления 16 по сигналу а включает электродвигатель 17 и мащина 6 движется вперед. В процессе движения щунт 11 выходит из зоны действия датчика 9 и, перемещаясь к датчику 1О, воздействует на него. По сигналу датчика 10 блок 14 торможения {по истечении выдержки времени, зависящей от уставки задатчика 12) подает команду в блок 16 управления, который переводит электродвигатель 17 в режим торможения и машина останав ливается. Хобот 7 опускается, сигнал исчезает и затем появляется вновь после укладки заготовки 1 на под 5 печи 4 и возвращения хобота 7 в верхнее поло- жение. В процессе движения машины 6 очередная заготовка 1, продолжая двигаться по последней, секции рольганга 2, одновременно воздействует на датчики 18 и 19 измерителя вариационной части длины заготовки. Промежуток времени, в течение которого оба датчика 18 и 19 вклю чены, линейно преобразуется в напряжение, которое подается на сумматор 21. На выходе последнего формируется на6пряжение U(- , которое обеспечивает остановку движущейся назад машины в положении, когда середина клещей совпадает с серединой очередной заготовки, транспортированной последней секцией рольганга 2 к упору 3. Это происходит после укладки в печь 4 предьщущей заготовки 1, когда машина движется назад (после подхода шунта 11 к датчику 9 и по истечении выдержки времени t g, в блоке торможения 15, определяемой напряжением и ), тормозится и останавливается в требуемом положении. При нормальной работе мащины в автоматическом режиме очередная заготовка появляется на предпоследней секции рольганга до того, как машина 6 после укладк предыдущей заготовки 1 на под 5 печи 4 возвращается в заднее положение. Поэтому сигнал d подается на блок 16 управления, как только поднимается хобот 7 с заготовкой 1, В результате машина, взяв очередную заготовку у упора 3, немедленно движется к печи (сигналО становится равным 1). Тем самым обеспечивается безостановочная работа машины и поддерживается ма.ксимально возможный темп ее работы. Датчики 18 и 19 устанавливаются на базовом расстоянии Lg друг от друга, которое равно минимальной длине поступающих заготовок. На выходе измерителя 20 вариационной части формируется напряже-. ние и „ , величина которого пропоршюнальна вариационной (переменной) части длины Lg заготовки VNiS-S) где Кл коэффициент пропорциональности; и« - длина измеряемой заготовки; L( -Lc - вариационная часть длины заготовки. Напряжение U подается на вход сумматора 21, на другой вход которого подается напряжение задатчика 13, определяющее точку остановки машины в исходном положении при минимальной длине заготовки, равной (при этом ), Напряжение на выходе сумматора равно (Uj.Uj) , W где п - коэффициент пропорхшональности. В блоке 15 торможения формируется интервал времени t-j-, отсчитываемый от момента срабатьюания датчика 9 (при подходе к нему шунта 11) до момента начала торможения машины. При этом машина 6 движется назад (от печи) с установившейся скоростью Vrp и проходит за время ty расстояние Ху , равное (3) Длительность интервала времени tr пропорциональна величине напряжения Uc т. е. - и; Подставляя в формулу (3) выражения (1), (2), и (4), получим -4b lP3H- ii4-4fl- 5) Здесь переменной величиной является длина L, заготовки. При длине заготовки, равной базовой длине ( U; Ug напряжение Озн задатчика 13 и, тем самым, координата выбирается при настройке автоматики таким образом, чтобы центр клещей 8 останавливался на расстоании 0,5 Ug от упора 3. В этом случае из формулы (5) для имеем ( Прл Ц вариационную часть ДХт координаты Х-(- запишемв виде ,-х,,(Ч-ЧМ Очевидно, что изменение координать начала торможения машины должно быть равно .Б ,5).; Отсюда получим следующее выражедп прав и ьной нас7ройкиустройств ние о.)(Ч-Ч)) i4b w Условия (6) и (8) выполняются при настройке устройства выбором коэффициента пропо эииональности. Запоминающий измеритель 2 О вариационной части длины заготовки работае от сигналов датчиков 18 и 19 положения заготовки 1, которые срабатывают при появлении заготовки в их рабочей зоне и подают сигналы на элемент И 22 (фиг. 2) и ЗАПРЕТ 23. Элемент И 22 управляет ключом 24, который (при еди ничном сигнале, подаваемом на его управляющий вход) подключает регулируем источник тока, состоящий из источника напряжший Е и регулируемогореёисто ра 25, ко входу операционного усилителя 26. Сброс информации, вырабатьгеаемой операционным усилителем 26, осушеств ляется ключом 28, выходы которого подключены параллельно операционному усилителю 26 и конденсатору 27, а управляющий вход - выходу элемента ЗАПРЕТ 23. Когда заготовка 1 отсутствует, датчики 18 и 19 не срабатывают и на их выходах сигналы равны нулю. В результате на выходах элементов И 22 и ЗАПРЕТ 23 сигналы равны нулю, клй)чи 24 и 28 заперты, конденсатор 27 не заряжается от регулируемого источника 25 тока и не разряжается через ключ 28. В результате, напряжение на ходе операционного усилителя 26, а измерителя 20, остается неизменным и равным нулю. При появлении первой заготовки 1 вначале срабйтывает датчик 18, его сигнал проходит через элемент ЗАПРЕТ 23 и Открьюает ключ 28, который обеспечивает выходное напряжение Up. О в течение времени движения заготовки 1 между датчиками 18 и 19. При срабатывании датчика 19 появляется сигнал на запрещающем входе элемента ЗАПРЕТ 23, и на его выходе сигнал исчезает, в результате чего ключ 28 закрьюается. Одновременно появляется Сигнал на втором входе элемента И 22, на его выходе появляется сигнал, который открьшает ключ 24. При этом источник 25 тока подключается ко входу операционного усилителя 26 и на его выходе напряжение начинает линейно нарастать в течение времени, пока вариационная часть заготовки воздействует одновременно на датчики 18 и 19. Как только задний конец заготовки 1 перестает воздействовать на датчик 18, единичный сигнал последнего исчезает с первого входа и выхода элемента И 22, ключ 24 закрывается и напряжение Uj, запоминается. Ключ 28 остается в закрытом состоянии , Время ta - в течение которого заряжался конденсатор 27, зависит от длины U а вариационной части заготовки и скорости движения заготовки, равной линейной скорости рольганга, а именно , . Напряжение на выходе операционного усилителя 26 равно и С Ь 9 . - величина тока от источника 2 где з тока; С - емкость конденсатора 27. Таким образом, на выходе измерител вариационной части длины заготовок запоминается напряжение Ы-ЧгСравнивая формулы (1) и (2), запишем выражение для коэффициента К К Vc с учетом формулы (8) имеем следут щее значение тока 3 , которое необходимо иметь от источника 25 тока чн, -J.U - 1 ..,- v Задатчики 12 и 13 торможения машины можно выполнить на потенциометрах. Например, задатчик 13 начала торможения машины при ходе ее назад выполнен на потенциометре 29 (фиг. 3). Выходное напряжение U., потенциометра 29 подается на первый вход сумматора 21, на второй вход которого подается напряжение Ug, с выхода измери теля 20. Сумматор 21 может быть реализован на операционном усилителе ЗО коэффициент усиления которого по каждому из сигналов иjj,Uju установлен равным единице. Для этого сопротивления выходных резисторов 31, 32 выбираютс равными сопротивлению резистора 33 в цепи обратной связи усилителя 30. На выходе сумматора формируется напряжение DOБлок 14 торможения, который выдае команду на торможение машины при ходе вперед (к печи), идентичен блоку 15 (фиг. 3). Он работает от датчика 10, который, срабатьгоая при движении машины, дает сигнал для начала отсчета интервала времени, определяемого поступающим от за датчика 12 напряжением и устанавливаемого при настройке в зависимости от места на поде 5 печи 4, где необходимо положить транспортируемую в печь заготовку. Блок 15 торможения предназначен дл формирования выдержки времени tj, от прохождения машиной контрольной точки (датчик 9) до вьщачи команды на тор)MokeHHH машины. Этот блок может быть 861.0 реализован на основе операисионного усилителя 34 и интегратора, выполненного на операционном усилителе 35 с конденсатором 36 в цепи обратной связи и резисторами 37 и 38 на входе. Режим {заботы интегратора устанавливается ключами 39 и 40. Управление ключами производится от датчика 9 исходного (заднего) положения загрузочной машины 6. Ключи 39 и 40 могут быть вьшолнены на полевых транзисторах. Выходами 5шляются электроды сток-исток, управляющим входом - затвор. При единичном сигнале на затворе ключа он заперт, при нулевом - открыт. Операционный усилитель 34 работает в режиме компаратора. На его вход через равные резисторы 41 и 42 подаются выходные напряжения соответственно сумматора 21 и усилителя 35, причем эти сигналы выбираются разнополярными. В переднем положении машийы на выходе датчика 9 - нулевой ст:нал. Клю чи 39 и 40 открыты, в результате чего на выходе усилителя 35 имеет место нулевой сигнал. Сигналом U с выхода сумматора 21 усилитель 34 установлен в состояние, при котором на его выходе имеется нулевой логический сигнал. При движении загрузочной машины 6 назад ее шунт воздействует на датчик .9 и на его выходе устанавливается единичный сигнал, ключи 39 и 40 закрываются, ток от источника питания Е через резисторы 3.7 и 38 поступает на вход операционного усилителя 35, который переходит в режим интегрирования и на его выходе напряжение линейно возрастает. За время выдержки tg напряжение на выходе усилителя 35 достигает уровня сигнала DC, . Компаратор переключается, на вход блока 16 управления поступает единичный сигнал. Таким образом, формируется вьщержка времени t на. торможение машины 6. При движении загрузочной машины 6 вперед выходной сигнал датчика 9 становится равным нулю, схема устанавливается в описанное выше состояние. Блок 16 управления (фиг. 4) содержит логические элементы НЕ 43, И 44, ПАМЯТЬ 45, И 46, НЕ 47, ИЛИ 48, НЕ 49, ИЛИ 5О, НЕ 51, НЕ 52, И 53, ПАМЯТЬ 54, И 55, ИЛИ 56, И 57. кнопку 58, .формирующую сигнал Ь (полуавтоматикаТ й тумилер (ключ) 59, формирующий сигнал 6 - автоматика. узел 6О силового реверсивного управления электродвигателеК(Г 17. Выход блока 14 торможения при ходе вперед соединен с входом элемента НЕ 43, выход которого- соединен с входом элемента И 44, другой вход которого связан с выходом элемента ИЛИ 50. Один из входов элемента ИЛИ 50 соединен с кнопкой 58 (сигнал б), другой - с выходом блока формирования сигнала q (фиг. 4). Выход элемента НЕ 43 соединен также с одним вз входов элемента И 46. Выход элемента ИЛИ 50 связан, кроме того, с входом элемента НЕ 51 и элементов 44 и И 53. Выход блока 15 торможения при ходе назад соединен с входом элемента НЕ 52, выход которого соединен с одним из входов элемента И 53 и с одним из входов элемента И 55. Выходы элементов ,И 44, И 53 соединены с запускающими входами соответствующих элементов 45 и ПАМЯТИ 54, сбрасьюающие входы которых соединены с выходом элемента НЕ 51 Выход элемента ПАМЯТЬ 45 соединен с одним из входов элемента 46 И и с од-25 ним из входов элемента ИЛИ 56, а элемента ПАМЯТЬ 54 - с входами элемента И 55, элемента ИЛИ 56 и элемента НЕ 47. Выход элемен-га 46 И подан на вход элемента НЕ 47, выход которого соединен с одним из входов элемента ИЛИ 48 другой вход которого соединен с выходом элемента И 55. Выход элемента ИЛИ 48 соединен со входами элементов 49 НЕ и 57 И, на другой вход последнего подан сигнал с выхода элемента 56 ИЛИ. Сигнал 5 (автоматика) подан на входы элементов 46 и 47 И. Выходные сигналы с элементов 49 НЕ и 57 И поданы на вход узла 6О силовог управления. В простейшем случае узел 60 силовог управления содержит контакторы, обеспечивающие реверсивный режим включения и отключения электродвигателя 17. В исходном состоянии сигналы а , 5 и 6 и сигнал на выходе блока 14 торможе-. ния равны нулю, а на выходе блока 15 торможения - единице. При этом на выходах элементов 43, 47, 48 и 51 сигналы равны единице, на остальных-нулю. При отключенной автоматике (сигнал б равен нулю) на выходах элементчэв сигналы следующие: И 46 - О, НЕ 47 -1 ИЛИ 48 - 1, НЕ 49 - О, И 57 - О. Они сохраняются неизменными независим от выходных сигналов остальных элемен926 тов. При этом на узел 6О управления сигнйлы не поступают, электродвигатель 17 отключен и машина неподвижна. При включении машины в режим автоматического управления на соответствующие входы элементов 46 и 57 И по- дается сигнал 6 равный единице. Однако на их выходах сигналы остаются равными нулю, так как на вход элемента И 46 с выхода элемента ПАМЯТЬ 45и на вход элемента И 57 с выхода элемента ИЛИ 56 подаются нулевые сигналы. Если машина находится в исходном (заднем) положении, хобот удерживает заготовку и находится в верхнем положении, при появлении очередной заготовки на последней секции рольганга сигнал d становится равным единице, на выходе элемента ИЛИ 5О появляется единичный сигнал( на выходе элемента ИЛИ 51,нулевой и сигналы сброса элементов ПАМЯТЬ 45 и 54 становятся равными нулю. При этом на всех входах элемента И 44 - единичные сигналы, элемент ПДМЯТЬ 45 срабатывает, сигналы на выходах элементов: И 46 - 1, НЕ47-О, ИЛИ 48 - О, НЕ 49 - 1, ИЛИ 56-1; в результате на первом входе силового узла 6О появляется единичный сигнал (что соответствует включению контактора хода Вперед), который включает электродвигатель 17 и машина движется к печи. В процессе движения блок 14 подает единичный сигнал начала торможения, появляются сигналы на выходах элементов НЕ 43 - О, И 44 - О, И 47 -О, на выходах элементов НЕ 47 - 1, на выходах элементов ИЛИ 48 - 1, НЕ49-О, И 57 - 1. На первом входе узла 60 появляется нулевой сигнал, а на второмединичный, электродвигатель 17 переводится в режим торможения и машина останавливается. Сигнал О становится равным нулю, на выходе элемента НЕ 51 появляется единичный сигнал, который сбрасывает элемент ПАМЯТЬ 45 и тем самым все элементы блока 16 устанавливаются в исходное состояние, кроме элементов НЕ 52 и 43, так как в переднем положении машины с блока 15 торможения при ходе Назад теперь поступает сигнал и на выходе элемента НЕ 52 сигнал равен. единице, а на выходе элемента НЕ 43 сигнал равен нулю. Совершаются операции опускания хобота, разжатия /клещей, .укладки заготовки на под печи и подъема хобота в положение. После этого, вновь появляется единичный сигнал Я , который разрешает даижение машины Назад. При этом снова сигналы на выходе элементов ИЛИ 5О 1, НЕ 51-0, И 53 - 1, после чего срабатътает элемент ПАМЯТЬ 54. Сигналы на выходе элемента И 55-1, ИЛИ 48-1, НЕ 49ИЛИ 56-1, И 57-1. На первом входе узла 60 сигнал равен нулю, на втором единице, электродвигатель 17 реверсируется, машина движется назад. .В конечной части пути блок 15 тор можения назад выдает единичный сигнал на начало торможения машины (с учетом длины вариационной части вновь подошедшей заготовки), сигналы на выходах элемента НЕ 52-О, элемента И 55-0, . ИЛИ48-0, И 57-О, НЕ 49-1. Напер вом входе узла 60 появляется единичный сигнал, на втором - нулевой, машина тор мозится и останавливается в нужной координате для взятия очередной заготовки При этом сигнал О становится равнь1М нулю, сигнал с выхода элемента НЕ 51 сбрасывает ПАМЯТЬ 54 в ис-° хорное состояние, на выходе блока 14 сигнал становится равным нулю и все элементы блока 16 управления приходят в исходное Состояние. При необходимости запустить машину в режиме полуавтоматике оператор с пульта нажатием кнопки 58 подает- единичный сигнал Ь , который, воздействуя на элемент ИЛИ 50 аналогично сигналу d , разрешает машине совершить полный цикл движения Вперед и Назад. Узел формирования сигнала q (разрешение движения) содержит логические элементы ИЛИ 61 (фкг. 4 нижняя схема), ПАМЯТЬ 62, ИЛИ 63, НЕ 64, И65 ИЛИ 66, и 67, компаратор 68 с входны ми резисторами 69, 7О, вьшрямитель 71 выполненный на четырех диодах по моего вой схеме, связанный с электродвигателем машины тахогенератора 72, датчик 73, контролирующий поднятое положение хобо- га машины, одновибратор 74. Входы элемента И 61 соединень с выходами a&fчиков 9 и 10. Один из входов элемента ИЛИ 63 соединен с выходом датчика 18 положения заготовки (датчики 9, 1О и 18-см. на фиг. 1), на другой его вход подан выход элемента 65 И, входы кбторого соединены с выходом датчика 10 переднегоположения машины, с датчиком 73 поднятого положения хобота и с выходом элемента 64 НЕ. Выход тахогенератора подан на выпрямитель, выход которого соединен с одним из входов компара тора 68, а на другой его вход подано небольшое напряжение смещения с-М Выход компаратора 68 соединен с входами элемента НЕ 64 и элемента ИЛИ 66, на второй вход которого подан сигнал с выхода элемента ПАМЯТЬ 62. Запускаюший вход элемента ПАМЯТЬ 62 связан с выходом элемента ИЛИ 63, сбрасьтающий вход - с выходом одновибратора 74, вход которого соединен с выходом элемента ИЛИ 61. Выход элемента ИЛИ 66 связан с одним из входов элемента И 67, другой вход которого соединен с датчиком 73 поднятого положения хобота. Сигнал q являетсявыходом элемента 67 И. На выходе тахогенер атора 72 и вьшрямите- ля 71 -нулевой сигнал. Напряжением 0 компаратор 68 установлен в состояние, при котором на его выходе сигнал равен Чулю. На выходах датчиков исходного 9 и переднего Ю положения машины сигналы равны соответственно 1 и О. На выходе датчика 73 -поднятого положения хобота сигнал равен 1, на выходе .датчика 18 наличия заготовки - О. На выходах элементов ИЛИ 61 и НЕ 64 сигнал равен 1, на выходах элементов ПАМЯТЬ 62. ИЛИ 63, И 65, ИЛИ 66, одновибратор 74-0. В результате сигнал а , формируемый на выходе элемента И 67, равен нулю. При подходе очередной заготовки к датчику 18 на выходе элемента ИЛИ 63 появляется единичный сигнал. Элемент ПАМЯТЬ 62 срабатывает и на выходах элементов ИЛИ 66 и И 67, устанавливаетбя единичный сигнал, т. е. появляемся единичный сигнал С1 . Загрузочная машина, получив разрешение на движение, разгоняется. Напряя®ние с тахогенератора 72 через выпрямитель 71-поступает на вход компаратора (38. Последний срабаоътает и на его выходе устанавливается единичный сигнал, а на выходе элемента 64 НЕ - нулевой. При этом выходной сигнал tt остается Нй13менным. Затем загрузочная машина перемещается к кольцевой печи. При этом сигнал с датчика 9 исчезает и через некоторое время появляется единичный сигнал на выходе датчика 10. В результате на выходе элемента ИЛИ 61 формируется импульс, по заднему фронту которого запускается одновибратор 74 и вьфабатывает единичный импульс, сбрасьюающий элемент ПАМЯТЬ 62. При этом на выходе эпемента ИЛИ 66 остается единичный сигнал (на выходе компаратора 68 единичный сигнал) и сигнал d также равен единице.
По истечении выдержки времени t на торможение электродвигатель тормозится, а хобот опускается. При этом компаратор 68 устанавливается в исходное состояние (на его выходе сигнал равен нулю), а единичный сигнал с выхода датчика 73 поднятого положения хобота исчезает. При этом за счет инерционности электропривода компаратор 68 срабатывает позже датчика 73. В результате на выходе элемента 65 остается сигнал, равнь1й нулю, а сигнал с исчезает, т.е. становится равныКл нулю. После укладки заготовкина под печи хобот поднимается и на выходе датчика 73 вновь появляется единичнь1Й сигнал. На выходе элементов И 65, а затем ИЛИ 63, устанавливаются единич№1е сигналы. Элемент ПАМЯТЬ 62 срабатьтает и на выходе элемента ИЛИ 66 появляется единичный сигнал. В результате сигнал q вновь становится равным единице.
Загрузочная машина 6 перемещается в исходное (заднее) положение. При этом на выходе компаратора 68 вновь появляеся единичный сигнал, устанавливаюншй нулевые сигналы на выходах элементов И 65 и ИЛИ 63. Также, как при движении вперед, за счет исчезновения сигнала датчика 1О и появления сигнала датчика 9, срабатывает одновибратор 74, сбрасывающий элемент ПАМЯТЬ 62. По сигналу датчика 9 формируется вьщержка времени Ь а тормоткение по подходе машины к исходному положению, по истечении которой подается команда на торможение электродвигателя. На выходах компаратора 68 и элемента ИЛИ 66 устанавливаются нулевые сигналы, сигнал Л исчезает. Клещи 8 захватьшают очередную заготовку, которая за время движения машины в печь подошла к стационарному упору, хобот поднимается, после чего механизмы и схема приходят в исходное состояние.
Использование предлагаемого устройства позволяет повысить производительность и ритмичность работы загрузочной машины в автоматическом режиме, исключить перекосы заготовок в клещевом зажиме и повысить надежность работы оборудования.
Формула из об р е т е н и я
Устройство автоматического управления электродвигателем перемещения загрузочной машины, содержащее датчики положения машины, каждый из которых соединен с соответствующим блоком торможения, выходы которых подключены к входам блока управления электродвигателем, задатчич начала торможения электродвигателя при ходе машины впере (к печи), выход которого подключен к соответствующему блоку торможения, отличающе ее я тем, что, с 1Ш1ЬЮ повышения производительности машины, оно дополнительно содержит измеритель длины заготовки, выход которого соединен с входом соответствующег блсжа торможения.
Источники информации, принятые во внимание при экспертизе
1. Озоль В. Л., Марцинчик Ф. Б. Механизация и автоматизация трубных шхов. М., Металлургия, 1964, с. 27 - 36.
2./ 4 ру/


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1721420A1 |
| Установка для безупорной мерной резки проката | 1977 |
|
SU656753A1 |
| Устройство для автоматическогоРАСпРЕдЕлЕНия ТРуб пО пОТОчНыМ лиНияМиХ ОТдЕлКи | 1979 |
|
SU806186A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| СПОСОБ РОВЕНСКОГО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
SU1833094A1 |
| Электропривод постоянного тока | 1990 |
|
SU1713070A1 |
| Система автоматического управления нагревом заготовок в проходной индукционной установке | 1979 |
|
SU865941A1 |
| Электропривод постоянного тока | 1989 |
|
SU1713067A1 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1986 |
|
SU1388205A1 |
| Система автоматического управления подогревом труб | 1982 |
|
SU1046306A1 |
/7
Ht
/
/if
Л
.f
а
Л
.-bi
r-S
Ъ
Г0-1
4в
Г
